(54) РОТОРНЫЙ ЭКСКАВАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный экскаватор | 1987 |
|
SU1447986A1 |
| Роторный экскаватор | 1988 |
|
SU1638259A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2023 |
|
RU2815378C1 |
| Устройство для изготовления полых изделий методом намотки длинномерного материала | 1984 |
|
SU1368188A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794243C1 |
| Роторная литьевая установка для переработки полимеров | 1980 |
|
SU1168427A1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПНЕВМОПРИВОДНЫМ КРАНОМ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2018 |
|
RU2681553C1 |
| Автоматическая система пожарной защиты | 1987 |
|
SU1484350A1 |
| Многопозиционная машина для производства трубчатых изделий из полимеров | 1984 |
|
SU1335480A1 |
| Устройство для автоматического управления электроприводом лебедки стрелы роторного экскаватора | 1960 |
|
SU133998A1 |
1
Изобретение относится к землеройной технике, конкретнее к вскрышным роторным экскаваторам.
Известен роторный экскаватор, включающий ходовую часть, поворотную платформу, роторную стрелу и отвальный транспортер 1.
Известен также роторный экскаватор, включающий ходовую часть с опорной базой, поворотную платформу и механизмом привода поворота, верхнее строение, роторную стрелу с механизмом привода вращения ротора, систему управления и блокировки двигателями 2.
Однако известные конструкции отличаются малой надежностью работы экскаватора из-за недостатков в его системах управлений и блокировки двигателей.
Цель изобретения - повыщение надежности работы экскаватора.
Поставленная цель достигается тем, что в роторном экскаваторе, включающем ходовую часть с опорной базой, поворотную платформу с механизмом привода поворота, верхнее строение, роторную стрелу с механизмом привода вращения ротора, систему управления и блокировки двигателями, механизмы привода поворота платформы и вращения ротора снабжены муфтами предельного момента с упругим звеном и с управляющим механизмом, каждая из которых имеет тахогенераторы, соединенные с входным и выходным валами муфты и электрически связанных между собой и с системой управления и блокировки двигателями.
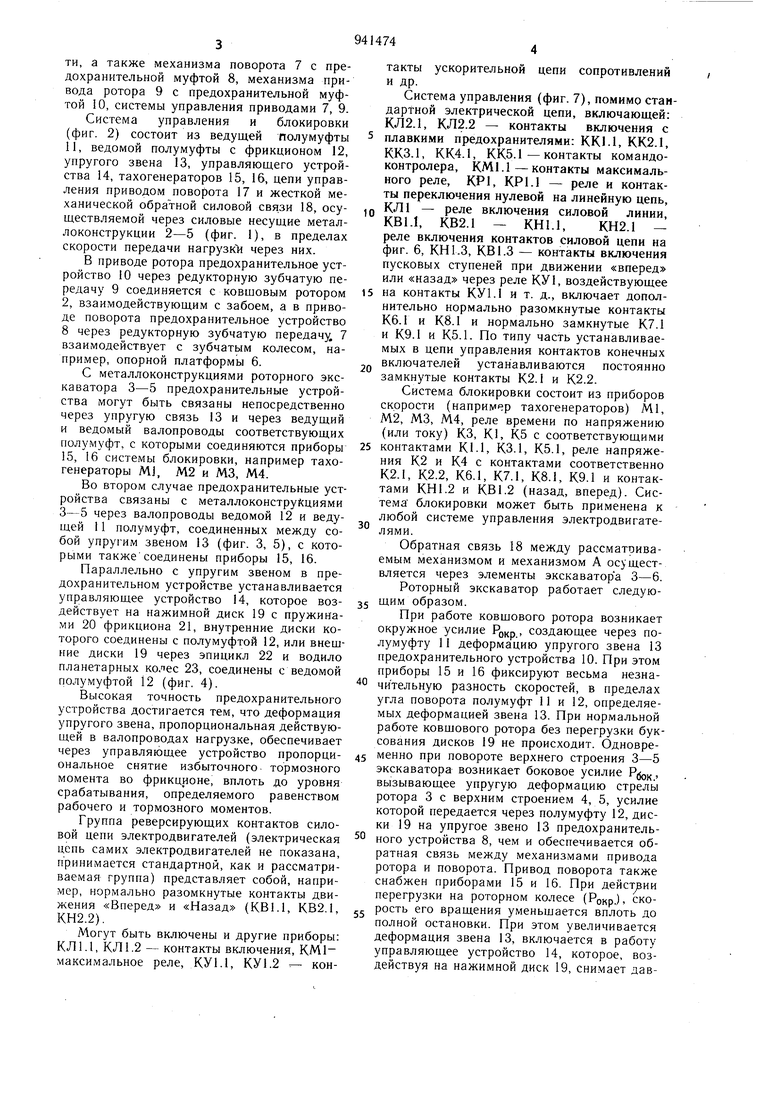
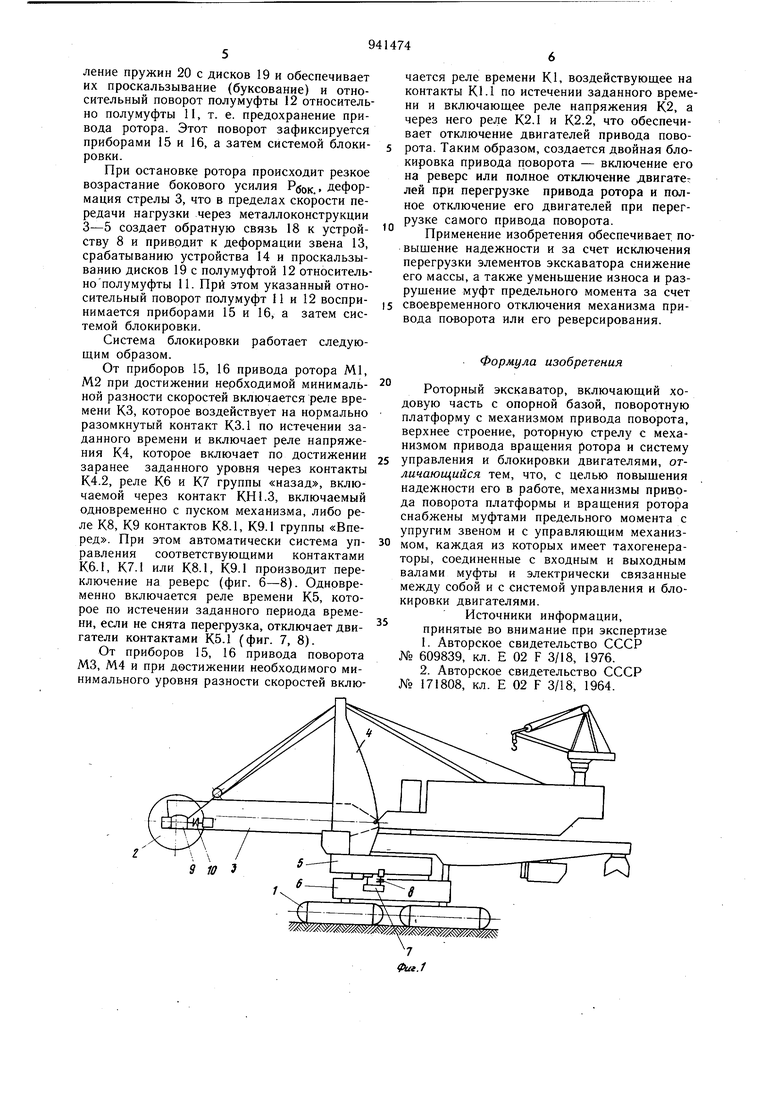
На фиг. 1 изображен роторный экскаватор, вид сбоку; на фиг. 2 - блок-схема
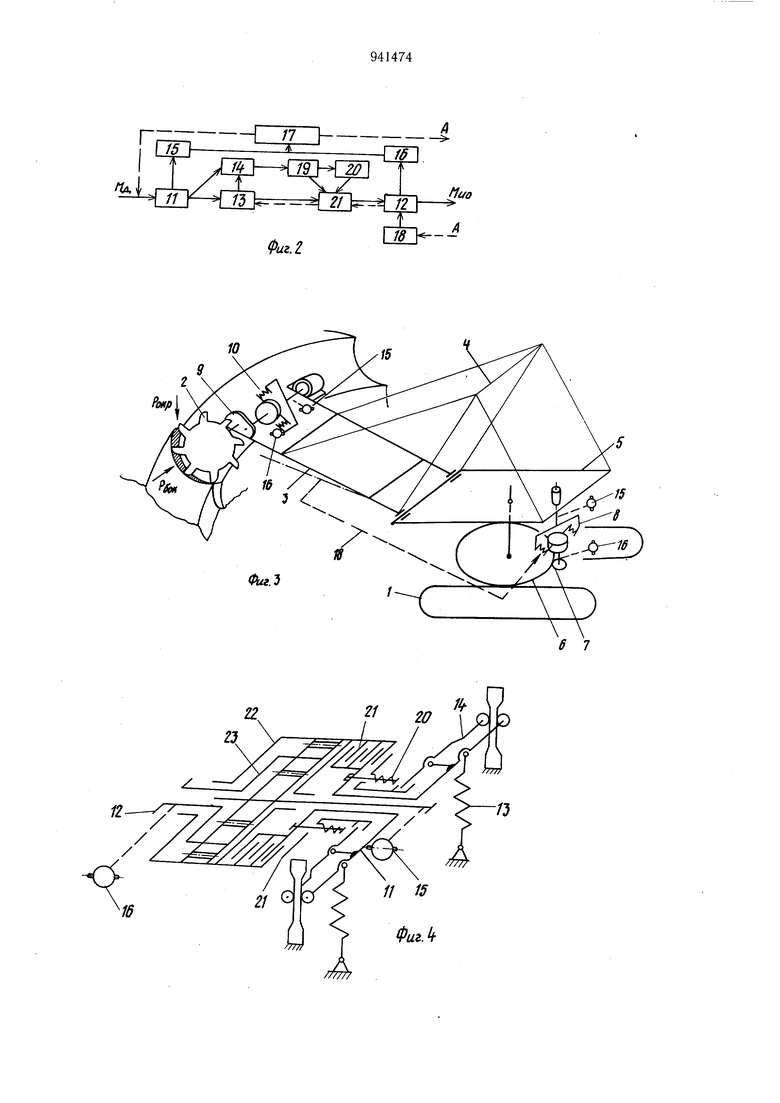
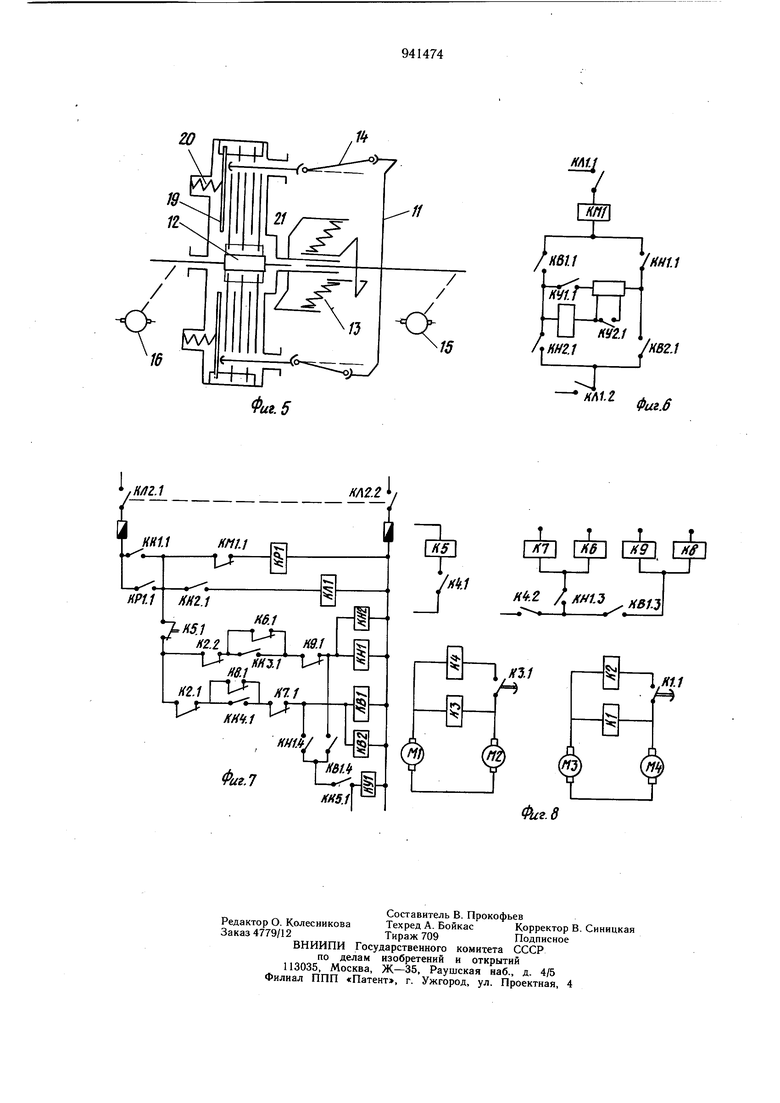
,Q экскаватора; на фиг. 3 - кинематическая схема экскаватора; на фиг. 4 и 5 - кинематические схемы муфты предельного момента с упругим звеном; на фиг. 6 - схема группы контактов силовой цепи механического привода поворота; на фиг. 7 -
15 схема системы управления с нулевой и линейной цепью привода поворота; на фиг. 8 - схема системы блокировки механизмов привода поворота платформы и вращения ротора.
20 Роторный экскаватор состоит из ходовой части 1 гученичного или другого типа, силовых металлоконструкций, состоящих из ротора 2, стрелы 3, верхней надстройки 4, поворотной платформы 5, опорной базы 6, являющейся опорой верхней поворотной части, а также механизма поворота 7 с предохранительной муфтой 8, механизма привода ротора 9 с предохранительной муфтой 0, системы управления приводами 7, 9.
Система управления и блокировки (фиг. 2) состоит из ведущей полу муфты И, ведомой полумуфты с фрикционом 12, упругого звена 13, управляющего устройства 14, тахогенераторов 15, 16, цепи управления приводом поворота 17 и жесткой механической обратной силовой связи 18, осуществляемой через силовые несущие металлоконструкции 2-5 (фиг. 1), в пределах скорости передачи нагрузкТи через них.
В приводе ротора предохранительное устройство 10 через редукторную зубчатую передачу 9 соединяется с ковщовым ротором 2, взаимодействующим с забоем, а в приводе поворота предохранительное устройство 8 через редукторную зубчатую передач} 7 взаимодействует с зубчатым колесом, например, опорной платформы 6.
С металлоконструкциями роторного экскаватора 3-5 предохранительные устройства могут быть связаны непосредственно через упругую связь 13 и через ведущий и ведомый валопроводы соответствующих полумуфт, с которыми соединяются приборы 15, 16 системы блокировки, например тахогенераторы MJ, М2 и МЗ, М4.
Во втором случае предохранительные устройства связаны с металлоконстру(циями 3-5 через валопроводы ведомой 12 и ведущей 11 полумуфт, соединенных между собой упругим звеном 13 (фиг. 3, 5), с которыми такжесоединены приборы 15, 16.
Параллельно с упругим звеном в предохранительном устройстве устанавливается управляющее устройство 14, которое воздействует на нажимной диск 19 с пружинами 20 фрикциона 21, внутренние диски которого соединены с полумуфтой 12, или внещние диски 19 через эпицикл 22 и водило планетарных колес 23, соединены с ведомой полумуфтой 12 (фиг. 4).
Высокая точность предохранительного устройства достигается тем, что деформация упругого звена, пропорциональная действующей в валопроводах нагрузке, обеспечивает через управляющее устройство пропорциональное снятие избыточного тормозного момента во фрикционе, вплоть до уровня срабатывания, определяемого равенством рабочего и тормозного моментов.
Группа реверсирующих контактов силовой цепи электродвигателей (электрическая цепь самих электродвигателей не показана, принимается стандартной, как и рассматриваемая группа) представляет собой, например, нормально разомкнутые контакты движения «Вперед и «Назад (KB 1.1, КВ2.1, КН2.2).
Могут быть включены и другие приборы: К Л 1.1, КЛ1.2 - контакты включения, КМ1максимальное реле, КУ1.1, КУ1.2 -- контакты ускорительной цепи сопротивлений и др.
Система управления (фиг. 7), помимо стандартной электрической цепи, включающей: КЛ2.1, КЛ2.2 - контакты включения с
плавкими предохранителями: КК1.1, КК2.1, КК3.1, КК4.1, КК5.1-контакты командоконтролера, КМ1.1-контакты максимального реле, КР1, КР1.1 - реле и контакты переключения нулевой на линейную цепь,
, КЛ1 - реле включения силовой линии, КВ1.1, КВ2.1 - КН1.1, КН2.1 реле включения контактов силовой цепи на фиг. 6, КН1.3, KB 1.3 - контакты включения пусковых ступеней при движении «вперед или «назад через реле КУ1, воздействующее
на контакты КУ1.1 и т. д., включает дополнительно нормально разомкнутые контакты Кб. 1 и КВ.1 и нормально замкнутые K7.I и K9.I и К5.1. По типу часть устанавливаемых в цепи управления контактов конечных включателей устанавливаются постоянно замкнутые контакты К2.1 и К2.2.
Система блокировки состоит из приборов скорости (например тахогенераторов) Ml, М2, МЗ, М4, реле времени по напряжению (или току) КЗ, К1, К5 с соответствующими
5 контактами К1.1, К3.1, К5.1, реле напряжения К2 и К4 с контактами соответственно К2.1, К2.2, К6.1, К7.1, К8.1, К9.1 и контактами КН1.2 и КВ1.2 (назад, вперед). Система блокировки может быть применена к любой системе управления электродвигателями.
Обратная связь 18 между рассматриваемым механизмом и механизмом А ос ществляется через элементы экскаватора 3-6. Роторный экскаватор работает следую5 щим образом.
При работе ковщового ротора возникает окружное усилие РОКП., создающее через полумуфту 11 деформацию упругого звена 13 предохранительного устройства 10. При этом приборы 15 и 16 фиксируют весьма незна чительную разность скоростей, в пределах угла поворота полумуфт 11 и 12, определяемых деформацией звена 13. При нормальной работе ковщового ротора без перегрузки буксования дисков 19 не происходит. Одновременно при повороте верхнего строения 3-5 экскаватора возникает боковое усилие . вызывающее упругую деформацию стрелы ротора 3 с верхним строением 4, 5, усилие которой передается через полу муфту 12, диски 19 на упругое звено 13 предохранительо ного устройства 8, чем и обеспечивается обратная связь между механизмами привода ротора и поворота. Привод поворота также снабжен приборами 15 и 16. При действии перегрузки на роторном колесе (Рокр.). ско, рость его вращения уменьщается вплоть до полной остановки. При этом увеличивается деформация звена 13, включается в работу управляющее устройство 14, которое, воздействуя на нажимной диск 19, снимает давление пружин 20 с дисков 19 и обеспечивает их проскальзывание (буксование) и относительный поворот полу муфты 12 относительно полумуфты 11, т. е. предохранение привода ротора. Этот поворот зафиксируется приборами 15 и 16, а затем системой блокировки. При остановке ротора происходит резкое возрастание бокового усилия . мация стрелы 3, что в пределах скорости передачи нагрузки через металлоконструкции 3-5 создает обратную связь 18 к устройству 8 и приводит к деформации звена 16, срабатыванию устройства 14 и проскальзыванию дисков 19 с полумуфтой 12 относительнополумуфты 11. При этом указанный относительный поворот полумуфт 11 и 12 воспринимается приборами 15 и 16, а затем системой блокировки. Система блокировки работает следующим образом. От приборов 15, 16 привода ротора Ml, М2 при достижении нербходимой минимальной разности скоростей включается реле времени КЗ которое воздействует на нормально разомкнутый контакт К3.1 по истечении заданного времени и включает реле напряжения К4 которое включает по достижении заранее заданного уровня через контакты К42 реле Кб и К7 группы «назад, вклюJ чаемой через контакт КН1.3, включаемый одновременно с пуском механизма, либо реле К8, К9 контактов К8.1, К9.1 группы «Вперед. При этом автоматически система управления соответствующими контактами К6.1, К7.1 или К8.1, К9.1 производит переключение на реверс (фиг. 6-8). Одновременно включается реле времени К5, которое по истечении заданного периода времени, если не снята перегрузка, отключает двигатели контактами К5.1 (фиг. 7, 8). От приборов 15, 16 привода поворота МЗ, М4 и при достижении необходимого минимального уровня разности скоростей вклю ается реле времени К1, воздействующее на онтакты К1.1 по истечении заданного времеи и включающее реле напряжения К, а ерез него реле К2.1 и К2.2, что обеспечиает отключение двигателей привода повоота Таким образом, создается двойная блоировка привода цоворота - включение его а реверс или полное отключение двигатеей при перегрузке привода ротора и полное отключение его двигателей при перегрузке самого привода поворота. Применение изобретения обеспечивает, повыщение надежности и за счет исключения перегрузки элементов экскаватора снижение его массы, а также уменьшение износа и разрушение муфт предельного момента за счет своевременного отключения механизма привода поворота или его реверсирования. . Формула изобретения Роторный экскаватор, включающий ходовую часть с опорной базой, поворотную платформу с механизмом привода поворота, верхнее строение, роторную стрелу с механизмом привода вращения ротора и систему управления и блокировки двигателями, отличающийся тем, что, с целью повышения надежности его в работе, механизмы привода поворота платформы и вращения ротора снабжены муфтами предельного момента с упругим звеном и с управляющим механизмом каждая из которых имеет тахогенераторь соединенные с входным и выходным валами муфты и электрически связанные между собой и с системой управления и блокировки двигателями. Источники информации, принятые во внимание при экспертизе 1Авторское свидетельство СССР № 609839, кл. Е 02 F 3/18, 1976. 2Авторское свидетельство СССР № 171808, кл. Е 02 F 3/18, 1964.
22
23
16 Фиг. 5 -M /HHtl I.Z
flU 1
-.
кии
Кд.1
,
ла/
КН3.1
Нв.1
т.1
г
КНЧ.1
t/
кит.
mif
КК5.1
(Pict.d
