гз
-К
1Б
00
4;
Изобретение относится к машиностроению и может быть использовано в приводах транспортных машин.
Целью изобретения является повышение эффективности торможения путем исключе- ния блокировки механизма останова посредством ограничения величины максимального тормозного момента.
На фиг. 1 изображен механизм, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. 6 - вид Д на фиг. 2.
Механизм останова содержит корпус 1. управляюш.ий привод 2 (не обозначен), роликовую обгонную муфту 3 двухстороннего действия и узел 4 возврата в исходное положение. Обгонная муфта состоит из обоймы 5, ступицы б, роликов 7 и поводковой вилки 8 с опорным выступом в виде штифта 9. Обойма 5 установлена в корпусе 1 с возможностью вращения на подшипниках 10 и с помощью зубчатых венцов И и 12 кинематически связана с колесом механизма передвижения (не показано). Ступица 6 неподвижно закреплена на шлицевом валу 13, связанном с корпусом 1 и центрирующемся по обойме 5 через подшипники 14. В пазах ступицы 6 (см. фиг. 2) установлены симметричные упругие балки 15 переменной жесткости, оканчивающиеся упорами 16 на контактной поверхности.
В исходном положении между роликом 7, поджимаемым пружиной 17 к обойме 5, и упором 16 имеется гарантированный зазор. Каждая балка 15 опирается, на выступы кулачков 18 и 19, установленных на выступе 20 с возможностью угловой регулировки, изме- няющей жесткость консольного вылета балки 15. Угловая фиксация кулачка 18 осуществляется гайками 21, а кулачка 19 - гайкой 22.
Выступ каждого из кулачков 18 и 19 перекрывает в осевом направлении их суммарную ширину.
Поводковая вилка 8, установленная на корпусе 1 с возможностью поворота вокруг оси механизма, выполнена с размещенными внутри обоймы 5 между упругими балками 15 фасонными двусторонними поводками 23, выступы которых соответствуют прорезям упоров 16.
На поводковой вилке 8 .симметрично закреплены два рычага 24, наружные концы которых шарнирно связаны через серьги 25 с якорями 26 электромагнитов 27 управляющего привода 2.
Узел 4 возврата, в исходное положение выполнен в виде двух симметрично размещенных в корпусе 1 и подпружиненных навстречу друг другу пружинами 28 толкате- лей 29, контактирующих в окружном направлении со штифтом 9 поводковой вилки 8. Обратный ход толкателей 29 ограничен выступами 30.
5
0
5
0
0
5
0
Механизм работает следующим образом.
Режим передвижения. С некоторым опережением включения привода передвижения, приводящего во вращение колеса (не изображены) и, следовательно, через зубчатые венцы II и 12 обойму 5, например, по часовой стрелке, включается левый электромагнит 27 и втягивает якорь 26 на весь ход. Якорь 26 перемещает серьгу 25 на ход якоря. Переместивщись на 1/2 хода, серьга 25 увлекает за собой рычаг 24, перемещая его на 1/2 хода и, поворачивает поводковую вилку 8 против часовой стрелки при этом выступы поводков 23 входят в прорези упоров 16, упираются в правые ролики 7 (см. фиг. 2) и выводят их из заклинивания, освобождая обойму 5, а правый рычаг 24 свободно поворачивается, скользя по пазу правой серьги 25, проходя 1/2 хода.
Режим торможения. Электромагнит 27 отключается, поводковая вилка 8 под действием левого подпружинейного толкателя 29, воздействующего на штифт 9, возвращается в исходное положение. Ролики 7 освобождаются от воздействия выступов поводков 23. Вращающаяся, например, по часовой стрелке, обойма 5 увлекает правые ролики 7 в клиновой зазор между обоймой 5 и балкой 15. По мере погружения роликов 7 в клиновой зазор увеличивается прогиб упругой балки 15 и соответственно нарастает сила трения между роликом 7 и обоймой 5. Этот процесс ограничивается упиранием правых роликов 5 в упоры 16, после чего тормозной момент больше не возрастает. До тех пор, пока движущий момент на обой- .ме 5 (определяемый инерционностью механизма передвижения) превыщает тормозной момент, развиваемый механизмом, обойма 5 будет продолжать вращаться с замедлением.
Таким образом, процесс торможения осуществляется непосредственно в механизме останова, а не в контакте колесо- путь, как правило нестабильном по величине коэффициента трения.
Регулировка величины тормозного мо- 1мента производится за счет изменения жесткости консольного вылета балки 15 пу- тем поворота кулачков 18 и 19 относительно ступицы 6.
Формула изобретения
1. Механизм останова, содержащий корпус, управляющий привод, роликовую обгонную муфту двустороннего действия, включающую обойму, ступицу с контактирующими с роликами элементами и поводковую вилку с опорным выступом, установленную в корпусе с возможностью поворота вокруг оси механизма останова и связанную с управляющим приводом, а также узел возврата в исходное положение, отличающийся тем, что, с целЬю повышения эффективности торможения путем исключения блокировки механизма останова, обойма
установлена в корпусе с возможностью ара- щения, ступица неподвижно закреплена в корпусе, ее элементы, контактирующие с роликами, выполнены в виде симметричных упругих балок переменной жесткости, имеющих упоры на концах контактирующей с роликами поверхности, а узел возврата выполнен в виде двух симметрично размещенных в корпусе и подпружиненных
навстречу друг другу толкателей, контактирующих в окружном направлении с опорным выступом вилкн.
2. Механизм по п. 1, отличающийся тем, что управляющий привод выполнен в виде электромагнитов, количество которых равно количеству рычагов вилки, причем половина хода якоря электромагнита соответствует величине хода толкателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ УПРАВЛЕНИЯ ОБГОННОЙ МУФТОЙ | 1966 |
|
SU184033A1 |
| И.-В. Ф. Маленок и И. Б. Покровская | 1970 |
|
SU288506A1 |
| ВИБРАТОР ДЛЯ ЭЛЕКТРОХИМИЧЕСКОЙ РАЗМЕРНОЙ | 1973 |
|
SU407702A1 |
| Инерционный привод | 1987 |
|
SU1484461A1 |
| ВЕЛОСИПЕД (ВАРИАНТЫ) | 2009 |
|
RU2404901C2 |
| Рабочий ротор | 1990 |
|
SU1756115A2 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Устройство для подачи и укладки штучных предметов | 1977 |
|
SU856899A2 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2005 |
|
RU2295992C2 |
| Устройство для транспортировки и передачи изделий | 1987 |
|
SU1479396A1 |


Изобретение относится к машиностроению и может быть использовано в приводах транспортных машин. Цель изобретения - повышение эффективности торможения путем исключения блокировки механизма останова. Обойма 5 установлена в корпусе 1 с возможностью вращения. Ступица 6 неподвижно закреплена на шлицевом валу. На ступице 6 установлены упругие балки 15 с упорами 16. Поводковая вилка выполнена с поводками 23. На вилке установлены рычаги, связанные через серьги с якорями электромагнитов. При работе механизма в режиме перемеш,ения вращается обойма 5, например, по часовой стрелке. Включается левый электромагнит. Якорь втянут, и вилка посредством рычага и серьги повернута против часовой стрелки. Выступы поводков 23 упираются в правые ролики 7, выводя их из заклинивания. В режиме торможения электромагнит отключается, вилка под воздействием механизма возврата переходит в исходное положение. В клиновой зазор между обоймой 5 и балкой 15 в процессе торможения увлекаются ролики 7. Балка 15 прогибается. Сила трения возрастает вплоть до момента упира- ния роликов 7 в упоры 16. Обойма 5 не блокируется, а продолжает вращаться с замедлением до остановки машины. 1 з. п. ф-лы, 6 ил. s (Л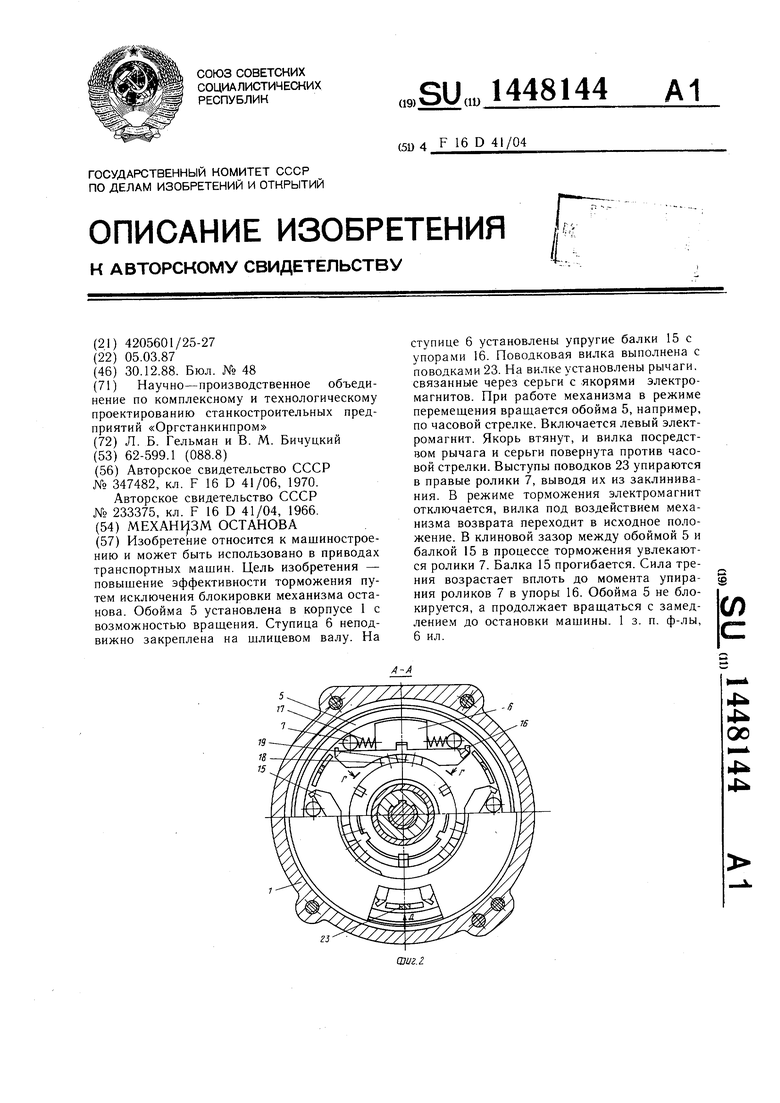
J 5 7
/4
/
сриг.З
16
-29
ФигЛ
cpuz.6
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 0 |
|
SU347482A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| 0 |
|
SU233375A1 | |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
