(54) УСТРОЙСТВО ДЛЯ ПОДАЧИ И УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ
I
Изобретение относится к расфасовочно-упаковочному оборудованию и может быть использовано в хлебопекарной промьшшенности для подачи и укладки хлебобулочных изделий в лотки.
По основному авт. св. № 710870 известно устройство для подачи и укладки штучных предметов, содержащее подающий транспортер, приспособление для формирования ряда предметов, механизм перемещения ряда предметов на общее группирование, приспособление для контроля наличия ряда предметов, механизм группирования и укладки предметов в тару, приспособление для установки и смены тары. Подача предметов в устройстве осуществляется непрерывно движущимся транспортером J.
Однако при подаче предметов, например хлебобулочных изделий в момент , когда подвижный борт приспособления для формирования ряда
отклоняется и изделия, формированные в ряд перед упором этого приспособления, перемещаются толкателем механизма передачи предметов на общее группирование с движущейся поверхности транспортеров, имеет место самосмещение изделий из ряда и изменение кх ориентированного положения, т.е. на общее группирование толкатель перемещает неупорядоченную группу изделий, что недопустимо, так как это ведет к неупорядоченному общему группи- . рованию изделий и, как следствие, неправильной укладке изделий в лоток, причем изделия могут быть приведены при этом в негодность.
Причиной изменения взаиморасположения изделий в сформированном ряду является действие движущейся поверхности транспортера на останавливающиеся перед упором и давящие ода(н на другой изделия. Поскольку положение изделий в ряду при отлоненном борте не ограничено, а оприкасающиеся в ряду изделия огут иметь форму с овальными поерхностями или различной заостреностью концов и др. или иметь относительно малую прочность поверхностей что. не способствует формированию и Сохранению ряда изделий, то изделия под действием транспортера и давлением одно на другим не могут удержаться в ряду и до перемещения ряда их толкателем са мосмещаются из заданного положения.
Цель изобретения - повьшение надежности работы устройства.
Поставленная цель достигается тем, что устройство снабжено механизмом прерывания движения транспортера, состоящим из двух обгонных
муфт, связанных между собой с ..помощью ступиц, при этом одна из муфт соединена с механизмом перемещения рядов предметов посредством повод- ковой вилки, с храповиком, собачки, взаимодействующей с вилкой, и кулачка с приводом транспортера посредством обоймы а другая - с приводным барабаном транспортера посредством обоймы.
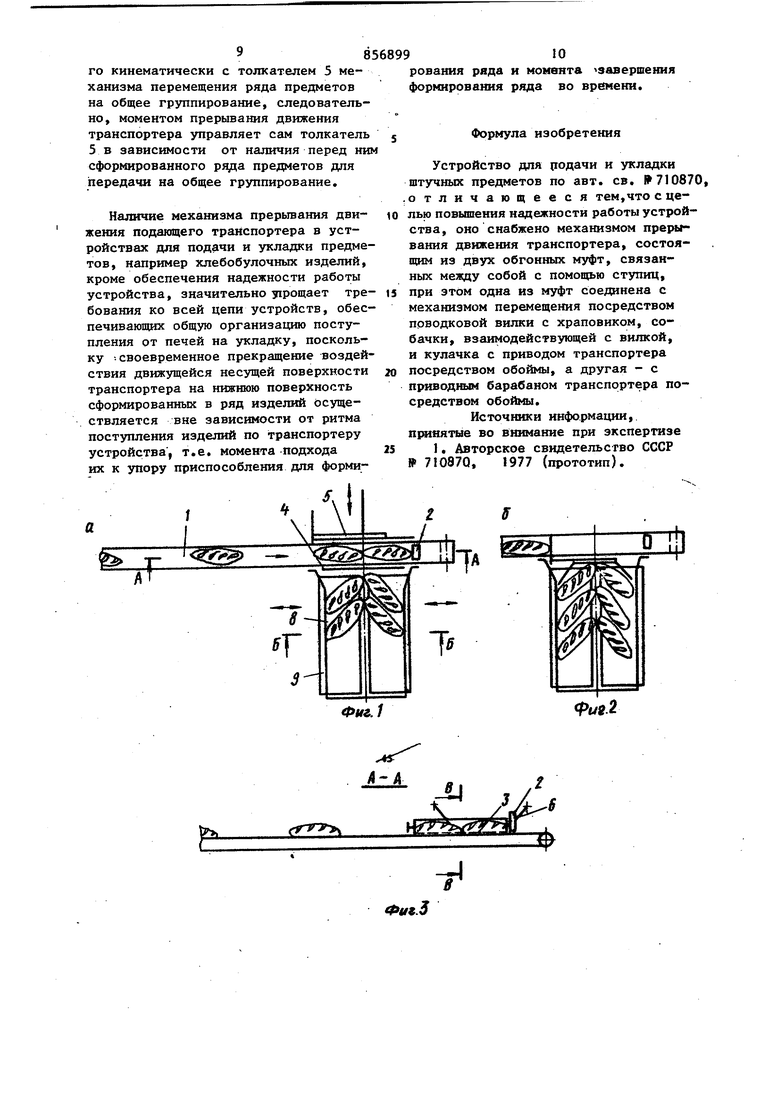
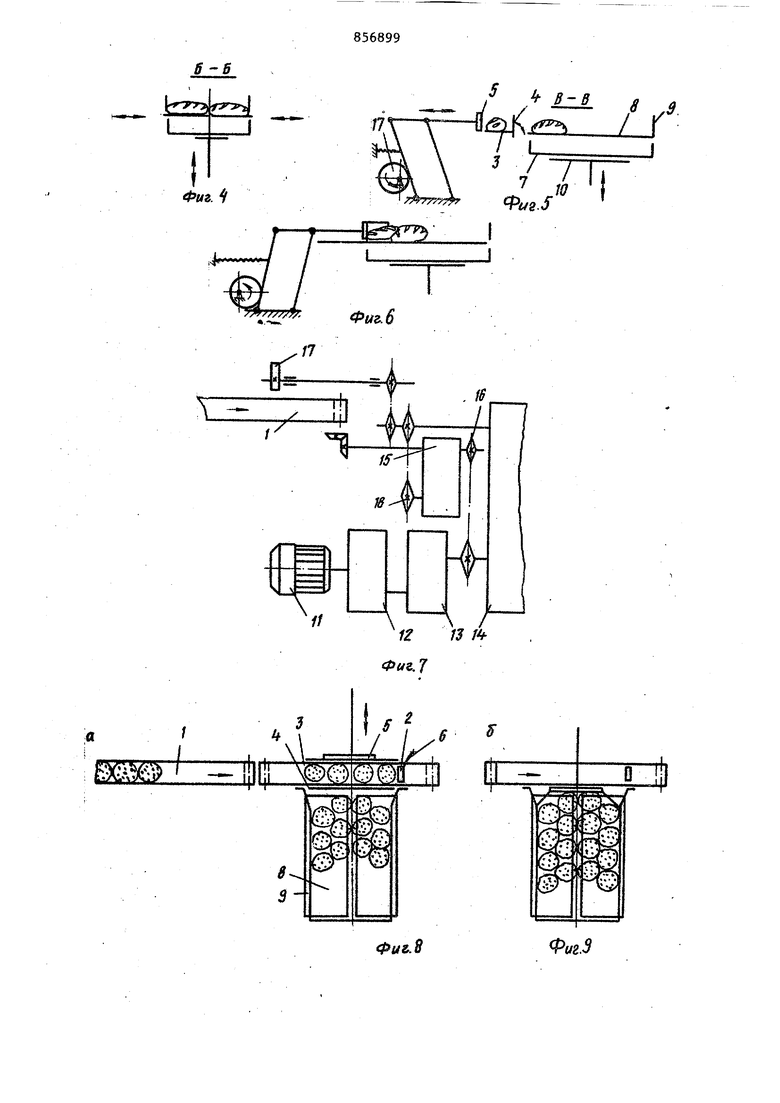
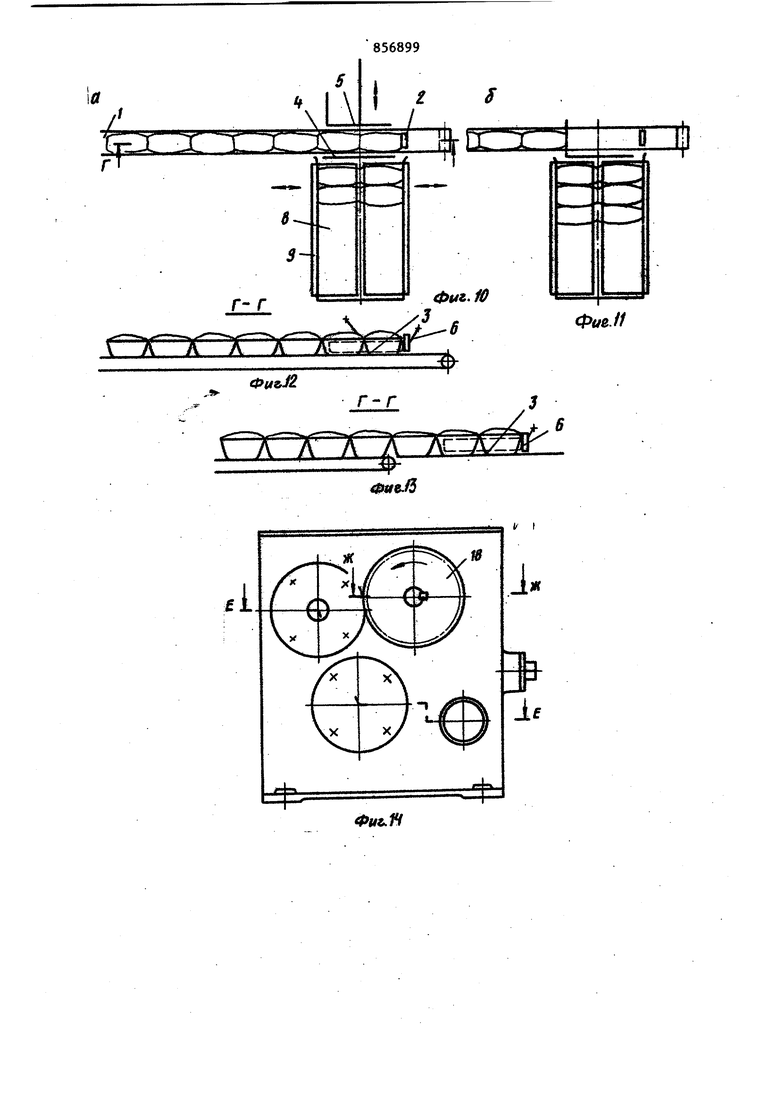
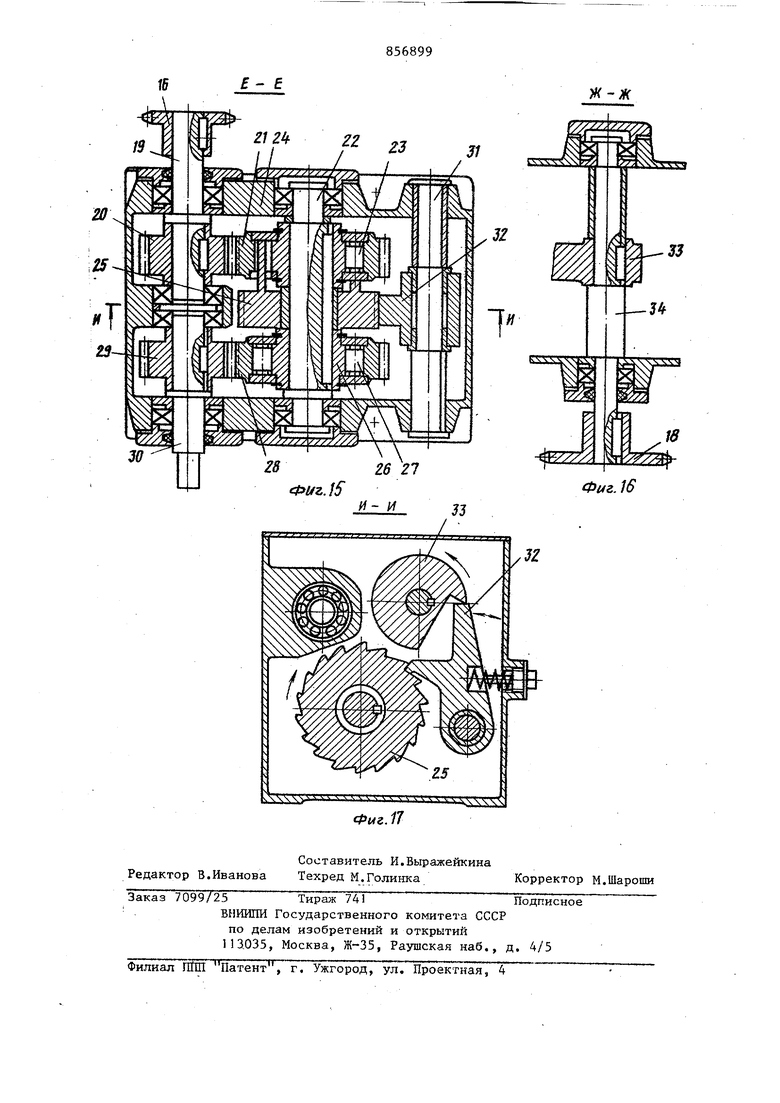
На фиг. 1 схематически изображено устройство для подачи и укладки штучных предметов, момент формирования ряда батонов; на фиг. 2 - то же, момент общего группирования; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1; на фиг. 5 - сечение В-В на фиг. 3, на момент формирования ряда батонов, на фиг. 6 - то же, момент общего группирования , на фиг, 7 - кинематическая схема связи механизма перемещения ряда предметов на общее группирование привода, подающего транспортера и механизма прерывания движения последнего на фиг. 8 - предлагаемое устройство, момент формирования ряда мелкоштучных изделий на фиг. 9 - то же, момент общего группированияJ на фиг. 10 - то же, момент формирования ряда формового хлеба на фиг. П - то же, момент общего группирования; на фиг. 12 сечение Г-Г на фиг. 10 на фиг. 13 то же (опорная поверхность приспособления для формирования ряда выполнена в виде неподвижной площадкк ; на фиг. 14 - механизм прерьюания /движения, общий вид; на фиг. 15 разрез Е-Е на фиг. Ц} на фиг. 16 разрез Ж-Ж на фиг. 14; на фиг. 17 разрез И-И на фиг. 14.
Устройство состоит из подающего транспортера 1, приспособления для
формирования ряда предметов, включающего упор 2, опорную поверхность 3 и подвижный борт 4, механизма перемещения ряда предметов на общее грзшпирование с толкателем 5. форма
переталкивающей рабочей поверхности которого в процессе работы изменяется заданным образом, приспособления для контроля наличия ряда пред метов с помощью датчиков 6, механизма группирования и укладки предметов в лоток 7, включающего раздвижные створки 8, неподвижный борт 9 и подъемный стол 10.
Устройство снабжено приводом,
включающим электродвигатель П,
вариатор 12 и редуктор J3 от которого подающему транспортеру 1 передается непрерьгоное независимое движение, а другим движущимся элементам устройства - через распредели- . тельную коробку 14, управляющей и согласующей их движение в определенном цикле. Для прерывания движения подающего транспортера 1 в момент
перемещения рядов предметов толкателем 5 механизма передачи на группирование устройство снабжено механизмом 15 прерьшания, через элементы которого от привода посред-
ством звездочки 16 передается независимое движение подающему транспортеру 1 и который управляется по положению кулака 17 хода толкателя 5 от звездочки 18, кинематически
связанной с кулаком 17.
В устройстве, при необходимости, опорная поверхность 3 приспособления для формирования ряда из поступивших предметов может быть выполнена
как в виде отрезка несущей поверхности транспортера (фиг. 3, 12), так и в виде отдельного транспортера (фиг. 8) или неподвижной площадки (фиг. 13).
Механизм 15 прерывания состоит из звездочки 16, расположенной на непрерывно вращающемся в процессе работы приводном валу 19, который имеет закрепленную неподвижно щестёрню 20. Шестерня 20 входит в зацепление с шестерней 21, представляющей собой обойму муфты обгона 2-й группы, которая расположена на промежуточном валу 22 и которая имеет ролики 5 23, неподвижно закрепленную на валу 22 ступицу 24 и.подвижно закрепле ную на валу 22 поводковую вилку 25. На валу 22 расположена также пре дохранительная муфта обгона 1-й гру пы с неподвижно закрепленной на вал 22 ступицей 26, роликами 27 и обойм в виде шестерни 28, Шестерня 28 вх дит в зацепление с шестерней 29, за крепленной неподвижно на выходном валу 30, от которого подаюпщй транс портер 1 приводится в движение. Поводковая вилка 25 служит для выбивания роликов 23 из клиновой ще ли, следствием чего является прерывание передачи движения от обоймы 21 к ступице 24 и остановка подающе го транспортера. Для управления раб той поводковой вилки 25 последняя несет на себе венец-храповик, взаимодействующий в процессе работы с установленной подвижно на оси 31 уп равляемой собачкой 32, Положение собачки задается кулачком 33, непод вижно закрепленным на валу 34, на ротором закреплена также звездочка 1 1 Звездочка 18 и кулак 17 хода тол геля 5 кинематически связаны таким образом, что один оборот кулака 17 соответствует одному обороту кулачка 33. Устройство работает следующим об разом. Предметы, например батоны (фиг,1 6), поступающие ориентированно, по одному, с необходимым для последующих операций интервалом, транспортером 1 подаются до упора 2 и останавливаются вплотную один за другим формируясь в ряд по два, на расположенной перед ним опорной поверхности 3 в канале, образующимся между поднятым бортом 4 и толкателем 5 в исходном положении. При наличии сигнала от датчиков 6 о сформироваюга ряда батонов передупором 2 к моменту начала хода толкателя 5, . еще до подхода третьего батона, толкатель 5 начинает смещать ряд батонов с опорной -поверхности 3 на поверхность раздвижных створок 8, ограниченную неподвижным бортом- 9, контур которого по периметру совпадает с контуром лотка 7, В момент начала смещения батонов толкателем 5 с опорной поверхности 3 на створки 8 борт 4 отклоняется и освобождает путь для смещения и 9 группирования батонов вплотную один к другому боковыми поверхностями на створках 8 с одновременным запоя , нением поверхности последних ограниченной бортом 9, Во время смещения батонов толките лам 5 с опорной поверхности 3 на створки 8 движение подакмцего транспортера 1 прерывается и воздействие сил трения-скольжения при движении его несущей поверхности на нижнюю поверхность батонов прекращается, что исключает самосмещение батонов из заданного положения и нарушение сформированного ряда их при отклоненном борте 4, т.е. обеспечивается надежность осуществления процесса смещения и общего группирования батонов . К моменту возврата толкателя 5 в исходное положение движение подакмцего транспортера 1 возобновляется, а борт 4 возвращается в поднятое положение, вновь образуя с толкателем 5 .канал и отделяя поверхность створок 8 от опорной поверхности 3. В период передачи на створки 8 ряда батонов для общего группирования (длина ряда превьшает ширину лотка, относительно которого этот ряд формируется) толкатель 5 изменяет заданным образом форму переталкивающей поверхности, тем самым изменяя взаиморасположение батонов в ряду с установлением между концами ряда расстояния не более внутреннего размера лотка по ширине. Батоны, сгруппированные на створках 8 с заданным расположением и количеством, укладываются в лоток 7 в результате гор изонтального раздвижения створок со скоростью, необхоимой для достаточногосохранения относительно группового расположеия изделий до момента попадания х в лоток 7. Причем высота падения атонов минимальная, так как лоток в момент раздвижения створок 8 помощью стола 10 поднимается под амые створки, а к моменту возвраа створок в исходное положение стол 0 опускает лоток на расстояние, ри котором створки не могут задеть ложенные в лоток батоны. Своевременное прекращение воздейтвия движущейся несущей поверхноста ранспортера йа нижнюю поверхность формированных в ряд батонов, обеспечивающее повьшение надежности работы устройства, необходимо и при работе с другими хлебобулочными изделиями на различных по исполнению устройствах для подачи и укладки (фиг. 8-13).
При подаче (фиг. 8, 9) заранее сформированных рядов предметов, например мелкоштучных изделий, с необходимым для последующих операций интервалов между рядами, можно опорную поверхность 3 приспособления для формирования ряда из поступивших предметов в предлагаемом-густройстве вьшолнить в виде отдельного транспортера, прерывающего движение во время смещения ряда изделий толкателем 5, обеспечив и надежность осуществления процесса смещения, и практически- отсутствие проскальзьшания ряда изделия перед упором 2.
При подале, например формового хлеба с неопределенным интервалом между б гханками (фиг. 10-13), перед упором 2 прис пособления для формирования ряда предметов может HH.Jкапливаться вплотную одна за другой и давить одна на другую под воздействием несущей поверхности подающего транспортера несколько большее чиело буханок, чем в сформированном для передачи ряду. Снятие воздействи транспортера на буханки в момент смещения толкателем ряда из двух буханок с опорной поверхности на общее группирование исключает подпор (давление) буханок одна яа другую, что обеспечивает достаточно свободное взаимосмещение контактирующих торцовыми поверхностями последней ( второй) буханки смещаемого ряда и поступающей вслед за ней (третьей), т.е.
в этот момент исключается затирание и нарушение целостности поверхности буханокi которые являются легко деформируемыми и малопрочными изделиями.
В процессе работы вышеописанных устройств своевременное прерывание движения подающего транспортера осуществляется с помощью механизма 15 .прерывания (фиг. 7)через который этому транспортеру передается независимое непрерьюное движение от привода устройства.
Передача движения этим механиэ мом осуществляется через его, непрерывно приводимый в движение посредством звездочки 16, приводной вал 1
От шестерни 20 вала 19 через обгонную муфту с шестерней-обоймой 21, роликами 23 и ступицей 24 промежу- у точному валу 22 движение передается в момент, когда поводковая вилка 25 этой муфты своим венцом-храповиком не взаимодействует с зубом собачки 32, т.е. ролики 23 при вращении шестерни-обоймы: :21 автоматически вкатываются в клиновую щель, образованную обоймой и срезанной частью ступицы, связывая этим оба звеи в одно целое. При этом ролики 23 увлекают за собой вилку 25 и она свободно вращается вместе с валом 22 В момент, когда зуб собачки 32 входит в зацепление с.венцом-храповиком поводковой вилки 25 и прерывает ее движение - вращение, последняя своими поводками выбивает ролики из клиновой щели и передача движения от вращающейся шестерни - обоймы 21 и ступице 24J а следовательно, валу 22 прекращается.
Передача движения от промежуточного вала 22 к выходному валу 30, кинематически связанному с подающим транспортером, осуществляется через обгонную муфту, имеющую ступицу 26, рол1-1кИ 27, и шестерню-обойму 28, .взаимодействующую с шестерней 29 вала 30. Муфта установлена так, что при вращении с валом 22 ступицы 26 ролики 27 автоматически вкатьгоаются в клиновую щель, образованную срезанной частью ступицы 26 и шестерней-обоймой 28, связьгоая оба звена в одно целое. Эта муфта исключает ударную нагрузку на муфту с поводковой вилкой 25, возникающей иа счет сил инерции движения транспортера, в момент, когда зуб собачки 32 останавливает вращение, поводковой вилки 25, которая в свою очередь выбирает ролики 23 и прерывает передачу движения к валу 22 и от него к транспортеру, так как шестерня-обойма 28, вращающаяся в этот момент ужетот транспортера, выкатывает ролики 27 из клиновой щели и обратное движение к валу 22 не передается.
Управление взаимодействием зуба собачки с венцом- храповиком поводковой вилки 25, т.е. моментом прерывания и возобновления движения выходного вала,30, а следовательно и, транспортера, в данном случае осуществляется от кулачка 33, связанно98го кинематически с толкателем 5 механизма перемещения ряда предметов на общее группирование, следовательно, моментом прерывания движения транспортера управляет сам толкатель 5 в зависимости от наличия перед ни сформированного ряда предметов для передачи на общее группирование. Нгшичие механизма прерьгаания движения подающего транспортера в устройствах для подачи и укладки предметов, например хлебобулочных изделий, кроме обеспечения надежности работы устройства, значительно ухрощает требования ко всей цепи устройств, обеспечивающих общую организацию поступления от печей на укладку, поскольку --своевременное прекращение воздействия движущейся несущей поверхности транспортера на нижнюю поверхность сформированных в ряд изделий осуществляется вне зависимости от ритма поступления изделий по транспортеру устройства , т.е. момента подхода их к упору приспособления для формирования ряда и момента завершения формирования ряда во времени. Формула изобретения Устройство для {годачи и укладки штучных предметов по авт. св. №710870, отличающееся тем,что с целью повышения надежности работы устройства, оно снабжено механизмом прерывания движения транспортера, состоящим из двух обгонных муфт, связанных между собой с помощью ступиц, при зтом одна из муфт соединена с механизмом перемещения посредством поводковой вилки с храповиком, собачки, взаимодействующей с вилкой, и кулачка с приводом транспортера посредством обоймы, а другая - с приводным барабаном транспортера посредством обоймы. Источники информации, П1Я1Нятые во внимание при экспертизе 1. торское свидетельство СССР 710870, 1977 (прототип).
55 -
Z
ttl
ITA
Т
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи и укладки штучных предметов | 1977 |
|
SU710870A1 |
| Устройство для подачи и укладкишТучНыХ издЕлий | 1978 |
|
SU797969A1 |
| Устройство для подачи предметов | 1978 |
|
SU738955A1 |
| Устройство для укладки штучныхиздЕлий B ТАРу | 1979 |
|
SU839866A1 |
| Автомат для выгрузки батонов с пода кольцевой печи и укладки их в транспортные лотки | 1958 |
|
SU118378A1 |
| Устройство для укладки предметов в тару | 1981 |
|
SU996274A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Устройство для автоматического питания уточно-шпульных машин пустыми шпулями | 1960 |
|
SU145167A1 |
| Устройство для укладки изделий в пакет | 1987 |
|
SU1530550A1 |
| УСТРОЙСТВО ДЛЯ ГРУППИРОВАНИЯ ИЗДЕЛИЙ | 1992 |
|
RU2043269C1 |
ffyi
JLJ.
.,
Kg jf-raj i
т
Фи.З
/7
-tN
тп lu
Л -
X
,/
. IS
юЛ
11
/
12 13 / Фиг, 1
EJ
гл
f 11
Риг.З
Фий.8
if I
,
Фи.1Ч
