1
Изобретение относится к устройствам для перемещения и перегрузки изделий цилиндрической формы, преимущественно в легкой промышленности.
Цель изобретения - повышение надежности передачи изделий неидеальной цилиндрической формы и снижение их повреждения.
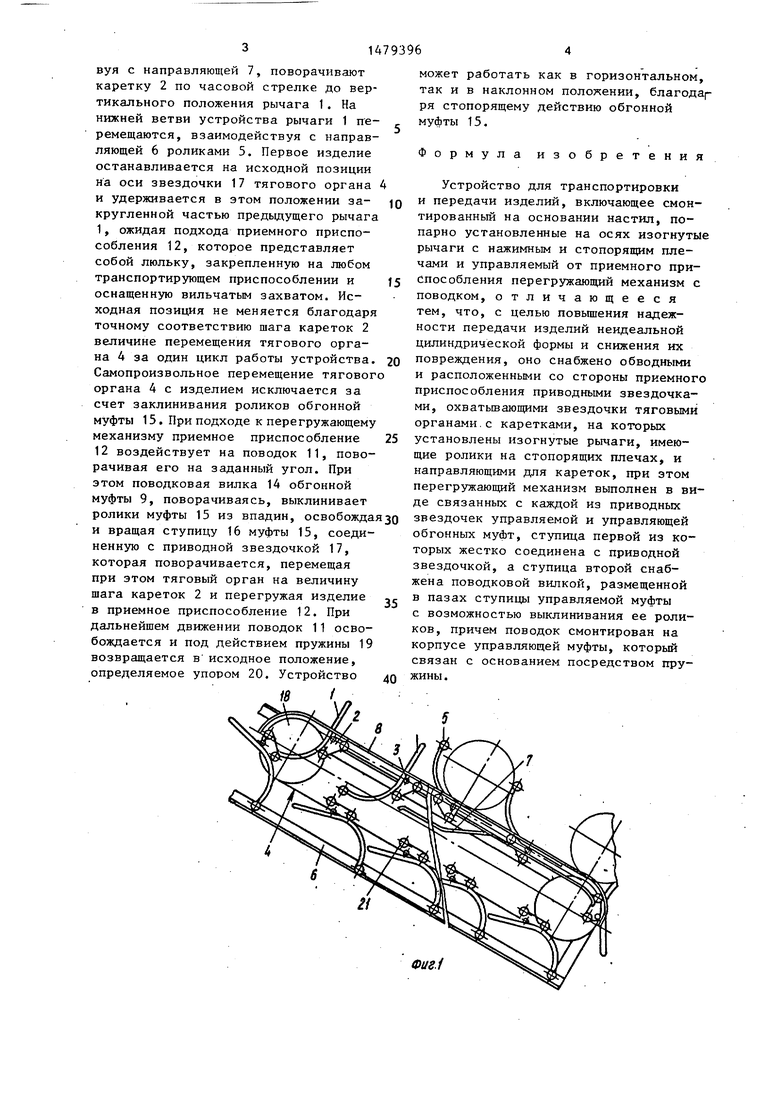
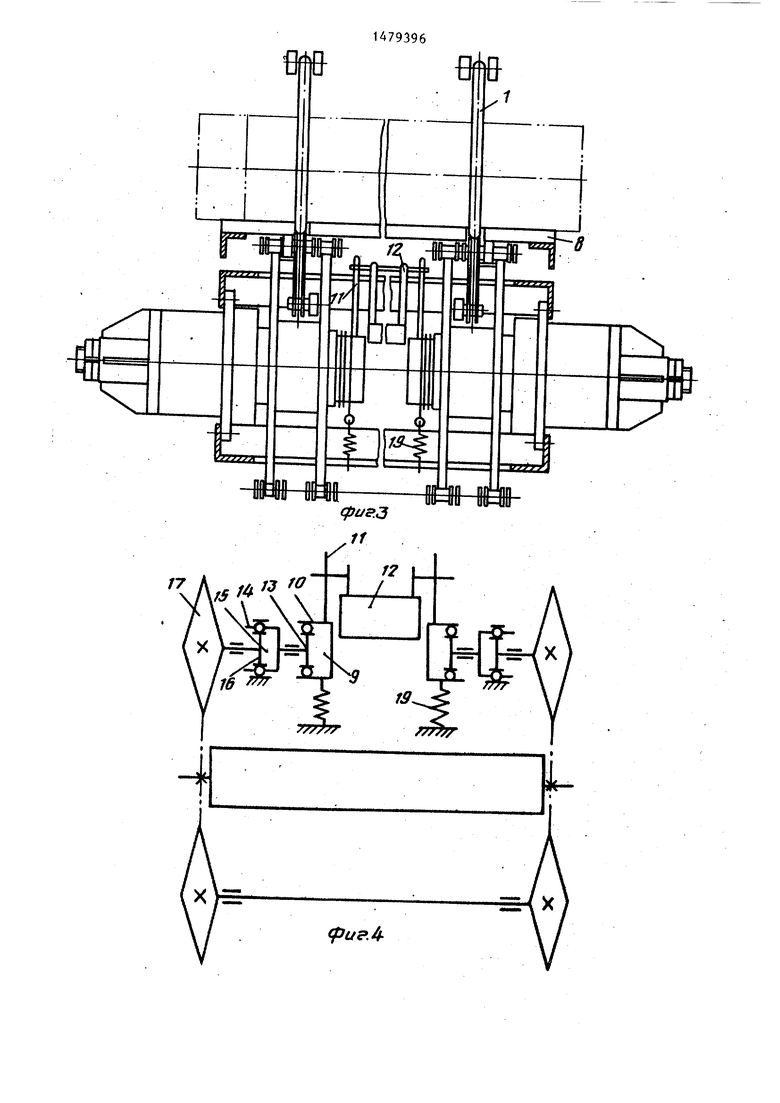
На фиг.1 изображено устройство, вид сбоку на фиг.2 - перегружающий механизм, вид сбокуj на фиг.З - перегружающий механизм, вид спереди $ на фиг.4 - схема перегружающего механизма (кинематическая принципиальная на фиг.5 --пространственная кинематическая схема перегружающего механизма.
Устройство для транспортировки и передачи изделий содержит рычаги 1, установленные попарно на каретках 2, закрепленных на осях 3, соединенных с тяговыми органами 4. Рычаги 1 выполнены с нажимными и стопорящими плечами, снабженными на концах роликами 5. Каретки 2 установлены с возможностью перемещения по направляющим 6 и 7 и настилу 8, смонтированных на основании. Механизм перегрузки содержит управляющую обгонную муфту 9, на корпусе 10 которой закреплен поводок 11, взаимодействующий с приемным приспособлением 12. На ступице 13 обгонной муфты 9 закреплена поводковая вилюа 14, подпирающая ролики управляемой обтонной муфты 15 и размещенная в пазах ступицы 16, к.
0
5
0
5
которой закреплена приводная звездочка 17. Приводные звездочки 17 связаны с обводными звездочками 18 тяговыми органами 4. Корпус 10 связан с основанием пружиной 19 для взаимодействия поводка 11 с упором 20 в исходном положении перегружающего механизма. Каретки 2 выполнены с роликами 21 для взаимодействия с направляющими 7.
Устройство работает следующим образом.
Изделия укладываются на настил 8 и перемещаются под действием сил гравитации или вручную в сторону перегружающего механизма до свободной позиции. При перемещении изделие воздействует на нажимные плечи рычагов 1, поворачивая их относительно оси 3. При этом стопорящие плечи рычагов 1 поднимаются, удерживая следующее изделие. Если позиция свободна, изделие перемещается дальше до упора в стопорящие плечи рычагов 1, удерживаемые в поднятом положении предыдущим изделием. Дальнейшее перемещение изделий к перегружающему механизму производится под действием перемещения тяговых органов 4 с помощью рычагов 1, Причем стопорящие плечи рычагов 1 каретки 2 в непосредственной близости к приводной звездочке 17 оказываются в поднятом состоянии вне зависимости от того, есть или отсутствует предыдущее изделие, так как ролик 21 каретки 2, вэаимодейст
вуя с направляющей 7, поворачивают каретку 2 по часовой стрелке до вертикального положения рычага 1. На нижней ветви устройства рычаги 1 пе- ремещаются, взаимодействуя с направляющей 6 роликами 5. Первое изделие останавливается на исходной позиции на оси звездочки 17 тягового органа и удерживается в этом положении за- кругленной частью предыдущего рычага 1, ожидая подхода приемного приспособления 12, которое представляет собой люльку, закрепленную на любом транспортирующем приспособлении и оснащенную вильчатым захватом. Исходная позиция не меняется благодаря точному соответствию шага кареток 2 величине перемещения тягового органа 4 за один цикл работы устройства. Самопроизвольное перемещение тяговог органа 4 с изделием исключается за счет заклинивания роликов обгонной муфты 15. При подходе к перегружающему механизму приемное приспособление 12 воздействует на поводок 11, поворачивая его на заданный угол. При этом поводковая вилка 14 обгонной муфты 9, поворачиваясь, выклинивает ролики муфты 15 из впадин, освобожда и вращая ступицу 16 муфты 15, соединенную с приводной звездочкой 17, которая поворачивается, перемещая при этом тяговый орган на величину шага кареток 2 и перегружая изделие в приемное приспособление 12. При дальнейшем движении поводок 11 освобождается и под действием пружины 19 возвращается в исходное положение, определяемое упором 20. Устройство
18 /
5
0
. Q о
5
5
0
может работать как в горизонтальном, так и в наклонном положении, благодар ря стопорящему действию обгонной муфты 15.
Формула изобретения
Устройство для транспортировки и передачи изделий, включающее смонтированный на основании настил, попарно установленные на осях изогнутые рычаги с нажимным и стопорящим плечами и управляемый от приемного приспособления перегружающий механизм с поводком, отличающееся тем, что, с целью повышения надежности передачи изделий неидеальной цилиндрической формы и снижения их повреждения, оно снабжено обводными и расположенными со стороны приемного приспособления приводными звездочками, охватывающими звездочки тяговыми органами.с каретками, на которых установлены изогнутые рычаги, имеющие ролики на стопорящих плечах, и направляющими для кареток, при этом перегружающий механизм выполнен в виде связанных с каждой из приводных звездочек управляемой и управляющей обгонных мусЬт, ступица первой из которых жестко соединена с приводной звездочкой, а ступица второй снабжена поводковой вилкой, размещенной в пазах ступицы управляемой муфты с возможностью выклинивания ее роликов, причем поводок смонтирован на корпусе управляющей муфты, который связан с основанием посредством пружины .
Фиг,/
1
П)
фа г. 5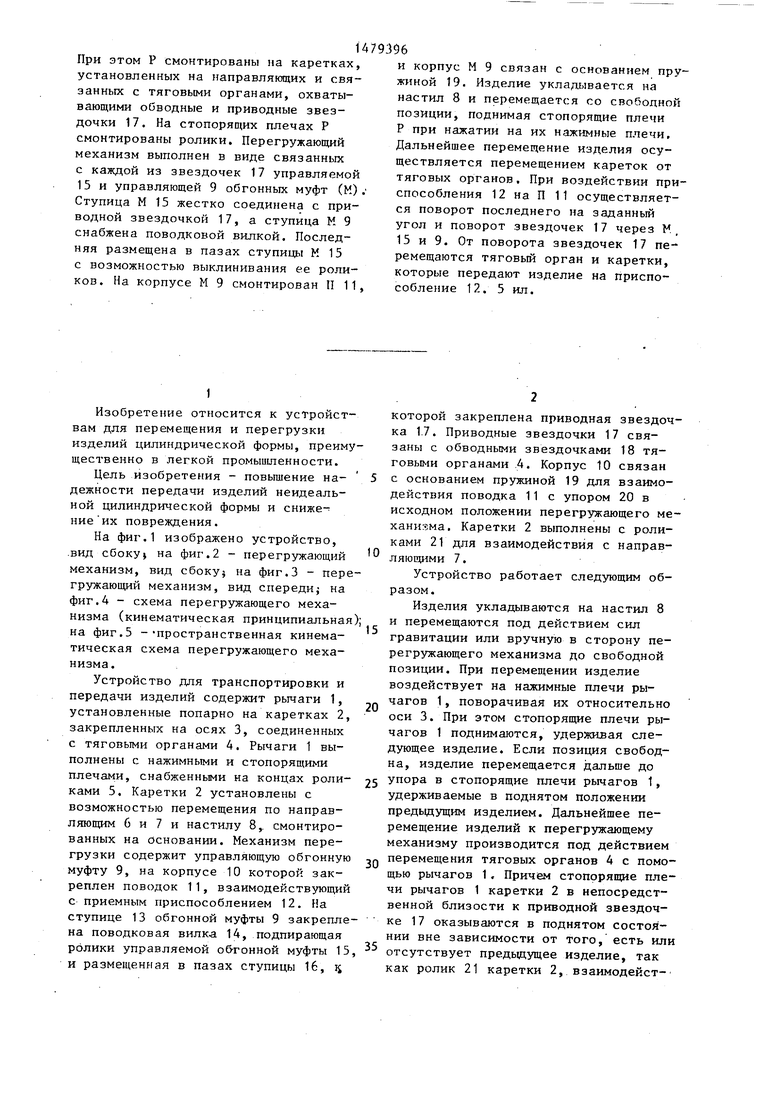
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения полуфабриката в швейном полуавтомате | 1972 |
|
SU441371A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОГРЕЙДЕРА | 1997 |
|
RU2133317C1 |
| Конвейерный гусеничный привод | 1990 |
|
SU1778047A1 |
| Вертикально-замкнутый конвейер пульсирующего типа | 1983 |
|
SU1137027A1 |
| МЕХАНИЗМ ПРИВОДА ХОДА ГУСЕНИЧНЫХ МАШИН | 1990 |
|
RU2009301C1 |
| Стенд для разборки полотна транспортера | 1974 |
|
SU510346A1 |
| ПРЕСС ДЛЯ ВУЛКАНИЗАЦИИ ЗАГОТОВОК БЕСКОНЕЧНЫХ КЛИНОВЫХ РЕМНЕЙ | 1971 |
|
SU314659A1 |
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
| Устройство для подачи материала к обрабатывающей машине | 1983 |
|
SU1091976A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1983 |
|
SU1183256A1 |
Изобретение относится преимущественно к легкой промышленности и позволяет повысить надежность передачи изделий неидеальной цилиндрической формы и снизить их повреждения. На основании смонтированы настил 8, попарно установленные на осях изогнутые рычаги /Р/ с нажимными и стопорящими плечами и управляемый от приемного приспособления 12 перегружающий механизм с поводком /П/ 11. При этом Р смонтированы на каретках, установленных на направляющих и связанных с тяговыми органами, охватывающими обводные и приводные звездочки 17. На стопорящих плечах Р смонтированы ролики. Перегружающий механизм выполнен в виде связанных с каждой из звездочек 17 управляемой 15 и управляющей 9 обгонных муфт (М). Ступица М 15 жестко соединена с приводной звездочкой 17, а ступица М 9, СНАБЖЕНА ПОВОДКОВОЙ ВИЛКОЙ. Последняя размещена в пазах ступицы М 15 с возможностью выклинивания ее роликов. На корпусе М 9 смонтирован П 11 и корпус М 9 связан с основанием пружиной 19. Изделие укладывается на настил 8 и перемещается со свободной позиции, поднимая стопорящие плечи Р при нажатии на их нажимные плечи. Дальнейшее перемещение изделия осуществляется перемещением кареток от тяговых органов. При воздействии приспособления 12 на П 11 осуществляются поворот последнего на заданный угол и поворот звездочек 17 через М 15 и 9. От поворота звездочек 17 перемещаются тяговый орган каретки с Р на шаг, которые передают, изделие на приспособление 12. 5 ил.
| Склад для хранения цилиндрических изделий | 1982 |
|
SU1036628A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| 0 |
|
SU329086A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
