Изобретение относится к подъемно-транспортному оборудованию.
Цель изобретения - упрощение конструкции.
На фиг. 1 показан захват в исходном по- л:ожении; на фиг. 2 - то же, в рабочем ио- ;1ожении.
j Захват содержит привод в виде силово- гЬ цилиндра, включающего корпус 1 с крыщ- ьой 2, порщень 3 со щтоком 4 и возвратную гружину 5, несущий элемент 6, прикрепленный к штоку 4, и захватные элементы 7, каждый из которых одним концом ш зрнирно рикреплен к корпусу 1 с. возможностью ра- .иального перемещения, а средней частью осредством шарниров 8, тяг 9 и шарниров О - к щтоку 4. Для получения двух степе- :ей подвижности относительно корпуса 1 ахватные элементы 7 соедине)ы с осям1: 11, 1азмещенными в радиальных пазах (2, вы- юлненных в крышке 2. На нижних свободных концах захватных элементов 7 преду- :мотрены входные скосы 13. Несущий эле- 6 служит для присоединения захвата к Грузоподъемному устройству 14. На фиг. 1 2 изображено захватываемое изделие 15 (j; отверстием 16.
I При закреплении несущего элемента 6 (ш штоке 4 подвижным и управляющим за- |(ватными элементами 7 звеном становится Корпус 1 привода. Его рабочее движение на захватывание изделия 15 направлено вниз и соверашется под совместным действием (1риводного усилия и собственной массы, но создает только предварительное поджатие ахватных элементов 7 к стенкам отверстия. Дальнейшее и полное поджатие захватных элементов 7 обеспечивается при последую- :щем подъеме захвата за счет их самозакли- :нивания от воспринимаемого веса груза.
При подаче рабочего давления в верхнюю полость силового цилиндра корпус 1 с :крышкой 2 переместятся до заданного ио- ложения вверх (фиг. 1). При этом под воздействием связанных с неподвижным штоком 4 тяг 9 захватные элементы 7 верхними концами с осями 11 упрутся во внутренние края пазов 12, а нижними свободными концами переместятся друг к другу, образуя за счет скосов 13 подобие клина. Пружина 5. расположенная между неподвижным поршнем 3 и крышкой 2, будет сжата.
- В исходном положении грузоподъемным устройством 14 захват вводится в отверстие 16 изделия 15. ВыполнениЕО этого приема способствует клиновидное расположение
0
0
5
5
35
40
45
50
захватных элементов 7 и наличие на них скосов 13. Введение захватных элементов 7 осуществляется настолько, чтобы тяги 9 сразу (фиг. 1) или с учетом рабочего хода силового цилиндра (фиг. 2) заглубились в зону отверстия 16. Затем привод реверсируется, избыточное давление в верхней полости силового цилиндра сбрасывается, пружина 5 разжимается, перемещая вниз корпус 10 с крышкой 2. Захватные элементы 7, взаимодействуя с тягами 9, шарнирно опирающимися на неподвижр1ый щток 4, разойдутся в стороны до упора о стенки отверстия 16 изделия 15. Усилие поджатия захватных элементов 7 в этот момент будет определяться действием пружины 5 и весом подвижных частей захвата, главным образом, корпуса 1 и крышки 2.
Плотное прилегание и гарантированное поджатие захватных элементов 7 к стенке отверстия 16 обеспечивается при запасе радиального хода осей 11 в пазах 12 крышки 2 и наличии некоторого угла о (фиг. 2) между тягами 9 и горизонтальной «мертвой плоскостью, проходящей через оси шарниров 10 на штоке 4.
Далее устройством 14 производится, подъем захвата за несущий элемент 6. При этом на поджатых к изделию 15 захватных элементах 7 возникают силы трения от удерживаемого груза, которые совпадают по на- правленкюсдействием привода и благодаря наличию угла с при расположении тяг 9 создают дополнительное и в целом достаточное для удержания груза усилие поджатия захватных элементов 7.
Освобождение захвата от изделия осуществляется одновременно с приведением захвата в исходное положение.
Формула изобретения
Захват для изделий с отверстием, содержащий связьшаемый с грузоподъемным механизмом несущий элемент, силовой цилиндр с подпружиненным штоком и захватные элементы, шарнирно с возможностью радиального перемешения прикрепленные посредством тяг к штоку силового цилиндра, отличаю- щийся тем, что, с целью упрощения конструкции, шток силового цилиндра жестко соединен с несущим элементом, а тяги, соединяющие щток и захватные элементы, прикреплены к последним в их средней части, при этом верхние концы захватных элементов шарнирно прикреплены к нижней части корпуса силового цилиндра.
12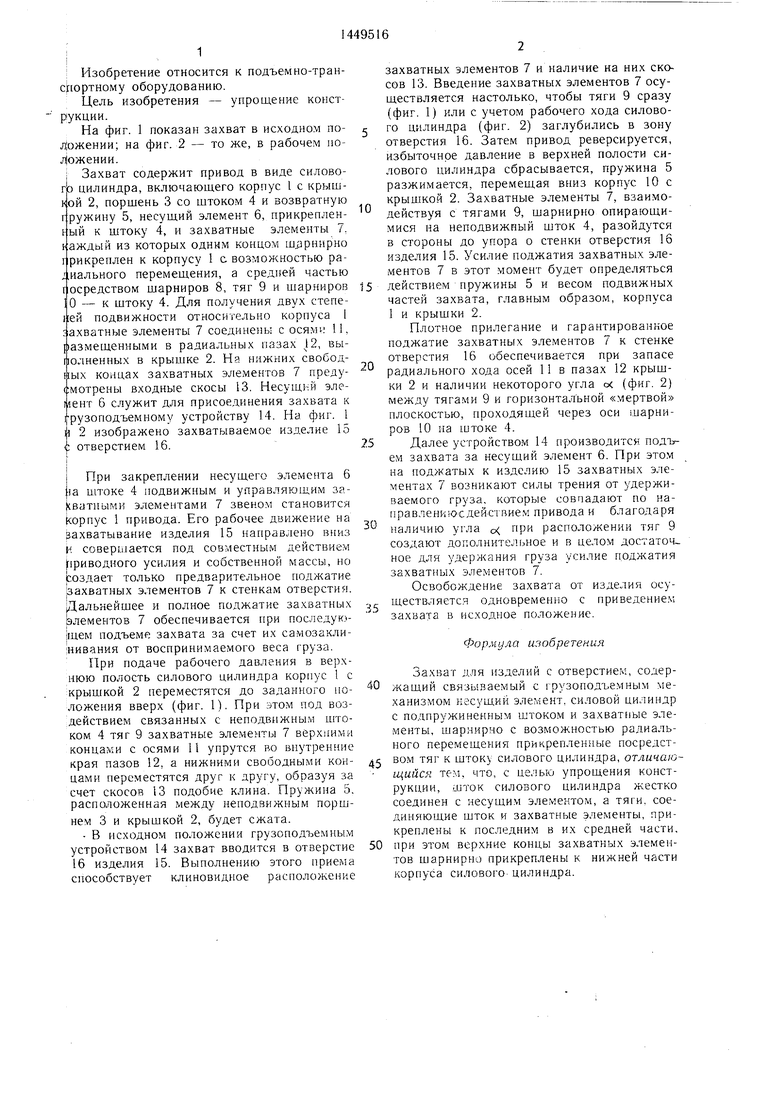
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1446085A1 |
| Захватное устройство для грузов в мешках | 1983 |
|
SU1129167A1 |
| Устройство для выпрессовки деталей типа втулок | 1987 |
|
SU1523298A2 |
| Грузозахватное устройство | 1986 |
|
SU1386548A1 |
| Устройство для монтажа и демонтажа деталей типа втулок | 1984 |
|
SU1225750A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Захватное устройство | 1986 |
|
SU1315301A1 |
| Устройство для выпрессовки деталей типа втулок | 1986 |
|
SU1431909A1 |
| Устройство для сборки деталей | 1984 |
|
SU1310157A1 |
| Захват | 1981 |
|
SU984862A1 |
Изобретение относится к устройствам для захвата изделий с отверстием. Цель изобретения - упрощение конструкции. Устройство содержит силовой цилиндр, включающий корпус I с крышкой 2, порщнем 3 и щтоком 4, возвратную пружину 5, несущий элемент 6, прикрепленный к щтоку 4, захватные элементы 7, соединенные посред12 13 ством шарниров 8, тяг 9 и шарниров 10 со штоком 4, а посредством осей 11, размещенных в пазах 12 крышки 2, с корпусом 1 силового цилиндра. Несущий элемент 6 присоединен к подъемному механизму 14. При подаче рабочего давления в верхнюю полость силового цилиндра корпус 1 перемещается вверх, а захватные элементы 7 - друг к другу. В тако.м положении устройство вводится в полость изделия 15. Затем давление в верхней полости силового цилиндра сбрасывается, корпус 1 перемещается вниз, а захватные элементы 7 расходятся в стороны до упора в стенки изделия 15. Далее механизмом 14 осуществляется подъем устройства вместе с изделием. Освобождение устройства от изделия осуществляется одновременно с приведением устройства в исходное положение. 2 ил. (Л 4 СО ел 05 16 Фчг.1
аг.г
| Захватное устройство для изделий с центральным отверстием | 1977 |
|
SU660919A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
