(Л
С
О)
О
Изобретение относится к подъемно- транспортной технике , в частности к грузозахватным устройствам.
Цель изобретения - снижение энер- гоемкости при захвате грузов как сна
ружи, так и изнутри.
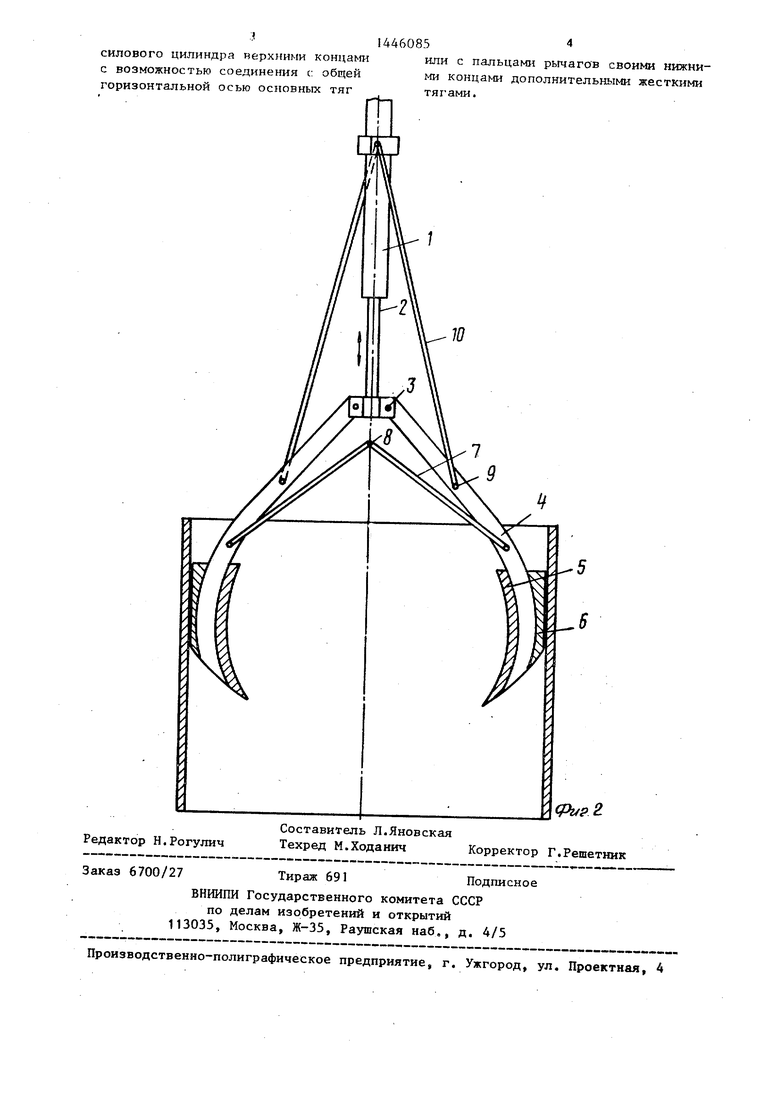
На фиг.1 показано грузозахватное устройство в положении для транспортировки груза при его обхвате снару- жи, общий вид; на фиг.2 - то же, при воздействии на груз изнутри.
Грузозахватное устройство, навешиваемое на крюк грузоподъемного механизма или стрелу манипулятора, содер жит силовой цилиндр 1 со штоком 2, имеющим возможность возвратно-поступательного движения и соединенным посредством горизонтальных осей 3 с захватными рычагами 4, основные 5 и дополнительные 6 рабочие органы, закрепленные на нижних концах захватных рычагов 4, тяги 7, одним концом соединенные друг с другом посредством общей горизонтальной оси 8, а другим концом шарнирно закрепленные на захватных рычагах 4, жестко закрепленные в верхних частях захватных рычагов 4 пальцы 9, дополнительные тяги 10, закрепленные одними концами на корпусе силового цилиндра 1 с возможностью крепления других концов на пальцах 9 или на оси 8.
Устройство работает следующим образом.
Захват груза с наружной стороны. Устройство, навешенное на крюк грузоподъемного механизма или стрелу манипулятора, находится в разгруженном состоянии - шток 2 силового цилиндра 1 втянут, дополнительные тяги 10 нижними концами закреплены на общей горизонтальной оси 8, рычаги 4 разведены в сторону. После подвода устройст 9а к грузу вьщвигается шток 2, при этом конец штока 2 перемещается вниз вместе с верхними концами захватных рычагов 4, нижние концы которых перемещаются вниз и одновременно сходятс благодаря тому, что концы тяг 7, закрепленные на захватных рычагах 4, поворачиваются относительно общей горизонтальной оси 8. Основные рабочие органы 5 охватывают поверхность гру- .за снаружи и оказывают на него усилие, надежно удерживающее груз. Освобождение груза осуществляется путем втягивания штока 2.
5 0 5 0
5
д д
0
5
Захват груза с внутренней стороны. Лдя этого необходимо отсоединить нижние КОН11М дополнительных тяг 10 от общей горизонтальной оси 8 и соединить их с захватными рычагами 4 посредством пальцев 9. Навешенный на крюк грузоподъемного механизма или стреле манипулятора устройство находится в разгруженном состоянии - шток 2 силового цилиндра 1 втянут, дополнительные тяги 10 нижними концами закреплены на захватных рычагах 4, которые приближены друг к другу После подвода захвата к грузу и опускания захватных рычагов 4 в полость груза вьщвигается шток 2, при этом перемещаются вниз верхние концы захватных рычагов 4. Одновременно с этим нижние концы дополнительных тяг 10 перемещаются вверх и в стороны относительно конца щтока 2, а нижние концы захватньк рычагов 4 удаляются друг от друга, поворачиваясь вйкруг осей 3 до прижима дополнительных рабочих органов 6 в стенки полости груза. Удержание груза обеспечивается за счет действия силы трения. Освобождение груза осуществляется путем втягивания штока 2 силового цилиндра 1 .
Формула изобретения Грузозахватное устройство, содержащее несущий элемент, закрепленные на горизонтальных осях захватные рычаги с рабочими органами на концах нижних плеч с внутренней по отношению к вертикальной оси симметрии стороны, шарнирно закрепленные на них одними своими концами тяги, другие концы которых связаны между собой общей горизонтальной осью, и установленный вертикально в несущем элементе силовой цилиндр для перемещения, захватных рычагов, отличающееся тем, что, с целью снижения энергоемкости при захвате грузов как снаружи, так и изнутри, горизонтальные оси двуплечих рычагов закреплены на конце щтока силового цилиндра, а шарниры тяг закреплены в нижних частях захватных рычагов, при этом устройство снабжено жестко закрепленными на концах рычагов с наружной их стороны дополнительными рабочими органами, жестко закрепленными в верхних частях захватных рычагов пальцами, закрепленными на корпусе
с возможностью соединения с: общей горизонтальной осью основных тяг
ми концами дополнительными жесткими тягами.
cpupSL
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| Грузозахватное устройство | 1986 |
|
SU1444278A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| Захватное устройство для пакетов плит | 1986 |
|
SU1463688A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным устройствам. Целью изобретения является снижение энергоемкости при захвате грузов как снэру- жи, так и изнутри. Грузозахватное устройство содержит силовой цилиндр 1 со штоком 2, соединенные с ним захватные рычаги 4, за тяги 7 одним концом соединенные друг с другом посредством общей горизонтальной оси 8, а другим концом закрепленные на захватных рычагах 4, дополнительные тяги 10, верхним концом соединенные с силовым цилиндром 1, а нижним - либо с захватными рычагами 4, либо - с общей горизонтальной осью В, 2 ил.
| Вайнсон А.А., Андреев А.Ф | |||
| Крановые грузозахватные устройства.-М., 1982, с | |||
| Поршень для воздушных тормозов с сжатым воздухом | 1921 |
|
SU188A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
