сации губок в рабочем положении. Под давлением рабочей среды поршень 4 и дополнительный поршень 5 перемещаются вверх,Усилие через пакет пружин 7, втулку 10 с упором 31 и гайку 11 передается на тягу 2 и зубчатую рейку 14, которая, взаимодействуя с зубчатыми секторами 23 зажимных губок 3, обеспечивает захват заготовки.
,,
Изобретение относится к технологическому оборудованию, применяемому для механизации и автоматизации технологических процессов, и может быть использовано в конструкциях манипуляторов, обслуживаюищх линии обработки труб и профильного проката
Целью изобретения является повышение надежности работы за счет, фиксации губок в рабочем положении,
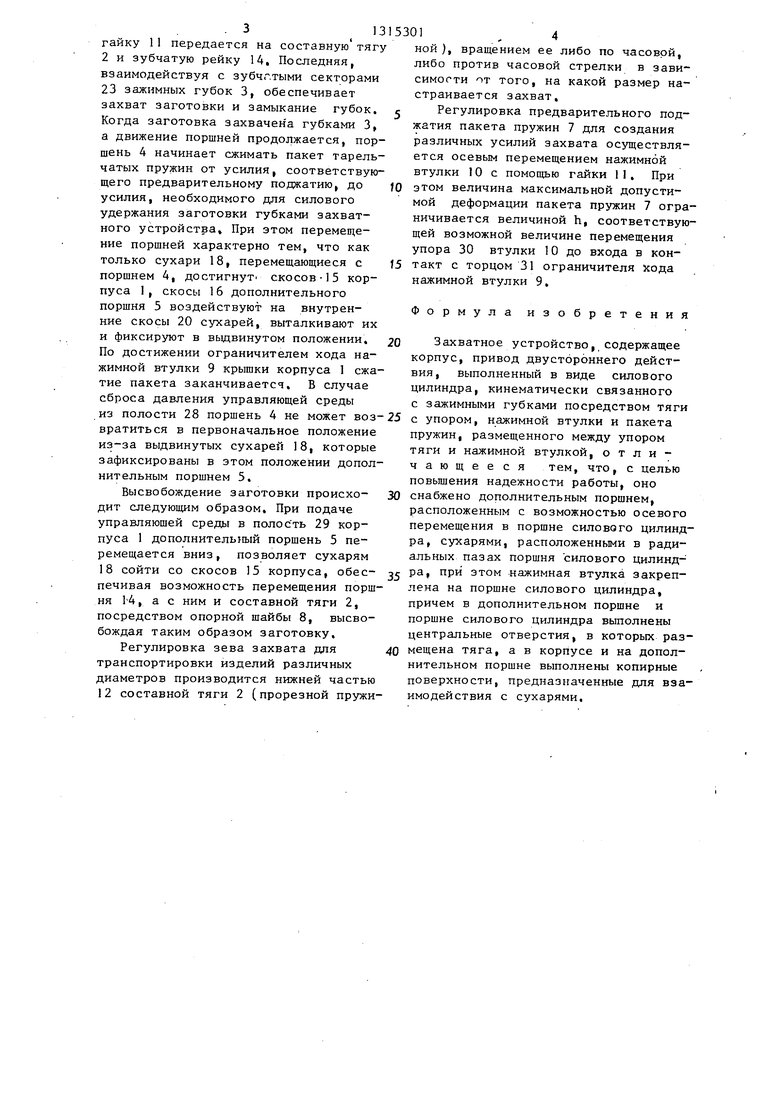
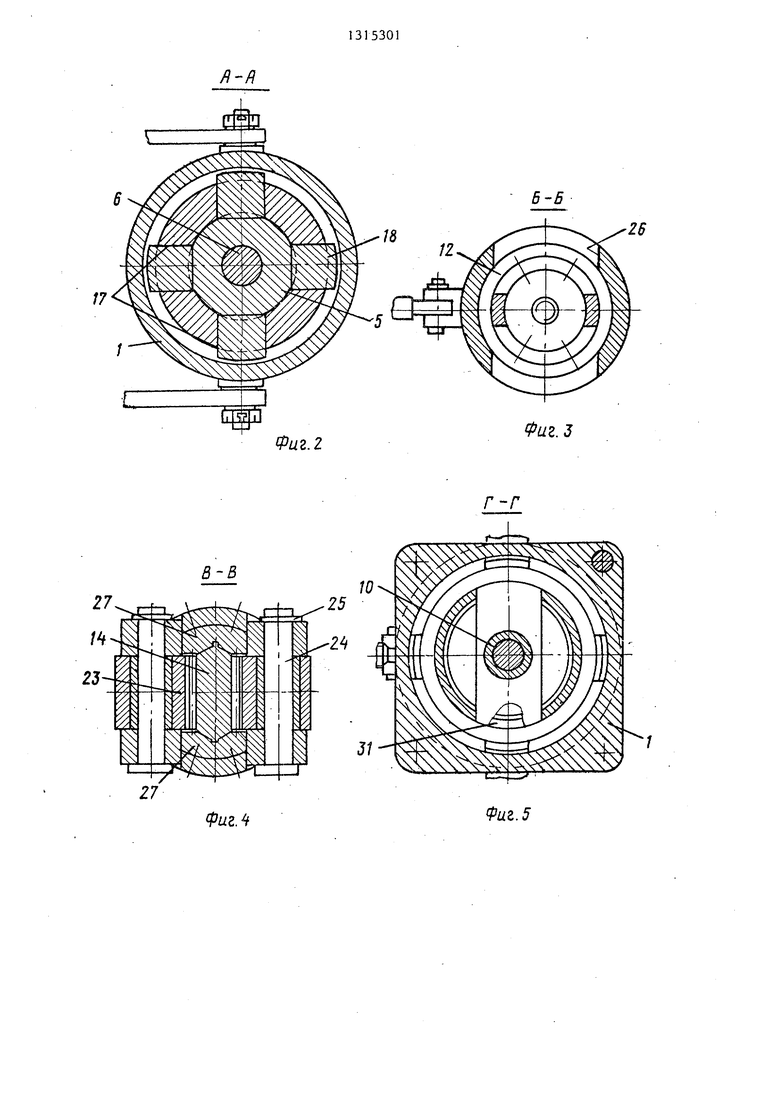
На фиг,1 изображено захватное устройство; на фиг,2 - сечение А-А на фиг,1; на фиг,3 - .сечение Б-Б на фиг,1; на фиг,4 - сечение В-В на фиг.1; на фиг,5 - сечение Г-Г на фиг,; на фиг.6 - вид Д на фиг,1.
Захватное устройство состоит из корпуса 1, привода двустороннего действия, составной тяги 2 и подвижных зажимных губок 3,
Привод двустороннего действия включает поршень 4 и дополнительный поршень 5, установленный телескопически. Верхняя часть составной тяги 6 размещена внутри вспомогательного поршня, а дополнительный - внутри поршня 4,
Поршень 4 подпружинен пакетом тарельчатых пружин 7 в осевом направлении и размещен между опорной Шайбой В и нажимной втулкой 9 с огра- гичителем хода. Предварительное под- жатие пакета пружин осуществляется втулкой 10, установленной на верхней части тяги 6 при помощи гайки 11, Нижняя часть 12 составной тяги 2 выполнена в форме прорезной пружины, жесткость которой больше жесткости пакета тарельчатых пружин 7, снабжена гнездами 13 для регулировки зева захвата и соединена с регулируемой по высоте зубчатой рейкой 14.
При этом как только сухари 18 достигнут скосов 15 корпуса 1, скосы 16 дополнительного поршня 5 воздействуют на скосы 20 сухарей, выталкивая их и фиксируяв выдвинутом положении. При сбросе давления поршень 4 не может возвратиться в первоначальное положение из-за выдвинутых сухарей 18, 6 ил.
Корпус и дополнительный поршень выполнены с копирными скосами 15 и 16 под углом, составляющим Л5 , а основной поршень - с радиал ьными пазами 17 прямоугольного сечения, внутри которых размещены сухари 18 с наружными и внутренними скосами 19 и 20, выполне нными также под углом 45° и взаимодействующими со скосами 15
и 16 корпуса и дополнительного поршня,,
На торцах нижней части тяги выполнены резьбовые гнезда 21 и 22 правого и левого направлений вращения,
Зубчатая рейка 14 связана с зубчатыми секторами -23 зажимных губок 3, Зажимные губки смонтированы на корпусе 1 с помощью пальцев 24, закрепленных пружинными кольцами 25, В нижней
части корпуса выполнены окна 26 и установлены напправляющие 27, вдоль которых перемещается зубчатая рейка 14,
В исходном положении губки 3 захвата разведены, поршень 4 и дополнительный поршень 5 - в крайнем нижнем положении, т,е, опорная шайба 8 упирается в торец корпуса 1, а дополни- тельньй поршень 5 - в опорную шайбу
8, при этом сухари 18 утоплены в па- зах 17 поршня 4, Пакет тарельчатых пружин предварительно поджат на величину, зависящую от массы транспортируемых заготовок,
Захватное устройство работает следующим образом.
Под давлением управляющей среды, подаваемой в полость 28 корпуса 1, поршень 4 и дополнительный поршень 5
начинают перемещаться вверх. Усилие от поршня 4 через пакет предварительно поджатых пружин 7, втулку 10 и .3 13
гайку 11 передается на составную тягу 2 и зубчатую рейку 14. Последняя, взаимодействуя с зубчг.тыми секторами 23 зажимных губок 3, обеспечивает захват заготовки и замыкание губок. Когда заготовка захвачена губками 3, а движение поршней продолжается, поршень 4 начинает сжимать пакет тарельчатых пружин от усилия, соответствующего предварительному поджатию, до усилия, необходимого для силового удержания заготовки губками захватного устройства. При этом перемещение поршней характерно тем, что как только сухари 18, перемещающиеся с поршнем 4, ДОСТИГНУТ скосов15 корпуса 1, скосы 16 дополнительного поршня 5 воздействуют на внутренние скосы 20 сухарей, выталкивают их и фиксируют в вьщвинутом положении. По достижении ограничителем хода нажимной втулки 9 крышки корпуса 1 сжатие пакета заканчивается. В случае сброса давления управляющей среды из полости 28 поршень 4 не может возвратиться в первоначальное положение из-за выдвинутых сухарей 18, которые зафиксированы в этом положении дополнительным поршнем 5.
Высвобождение заготовки происходит следующим образом. При подаче управляющей среды в полос ть 29 корпуса 1 дополнительный поршень 5 перемещается вниз, позволяет сухарям 18 сойти со скосов 15 корпуса, обеспечивая возможность перемещения поршня 14, а с ним и составной тяги 2, посредством опорной шайбы 8, высвобождая таким образом заготовку.
Регулировка зева захвата для транспортировки изделий различных диаметров производится нижней частью 12 составной тяги 2 (прорезной пружи5301 4
ной ), вращением ее либо по часовой, либо против часовой стрелки в зависимости от того, на какой размер настраивается захват.
с Регулировка предварительного под- жатия пакета пружин 7 для создания различных усилий захвата осуществляется осевым перемещением нажимной втулки 10 с помощью гайки 1 1 . При
O этом величина максимальной допустимой деформации пакета пружин 7 ограничивается величиной h, соответствующей возможной величине перемещения упора 30 втулки 10 до входа в кон5 такт с торцом 31 ограничителя хода нажимной втулки 9.
Формула изобретения
0 Захватное устройство, содержащее корпус, привод двустороннего действия, выполненный в виде силового цилиндра, кинематически связанного с зажимными губками посредством тяги
5 с упором, нажимной втулки и пакета пружин, размещенного между упором тяги и нажимной втулкой, отличающееся тем, что, с целью повышения надежности работы, оно
0 снабжено дополнительным поршнем,
расположенным с возможностью осевого перемещения в поршне силового цилиндра, сухарями, расположенными в радиальных пазах поршня силового цилиндэс ра, при этом нажимная втулка закреплена на поршне силового цилиндра, причем в дополнительном поршне и поршне силового цилиндра выполнены центральные отверстия, в которых раз0 мещена тяга, а в корпусе и на дополнительном поршне выполнены копирные поверхности, предназначенные для взаимодействия с сухарями.
Фиг. 2
Фиг.З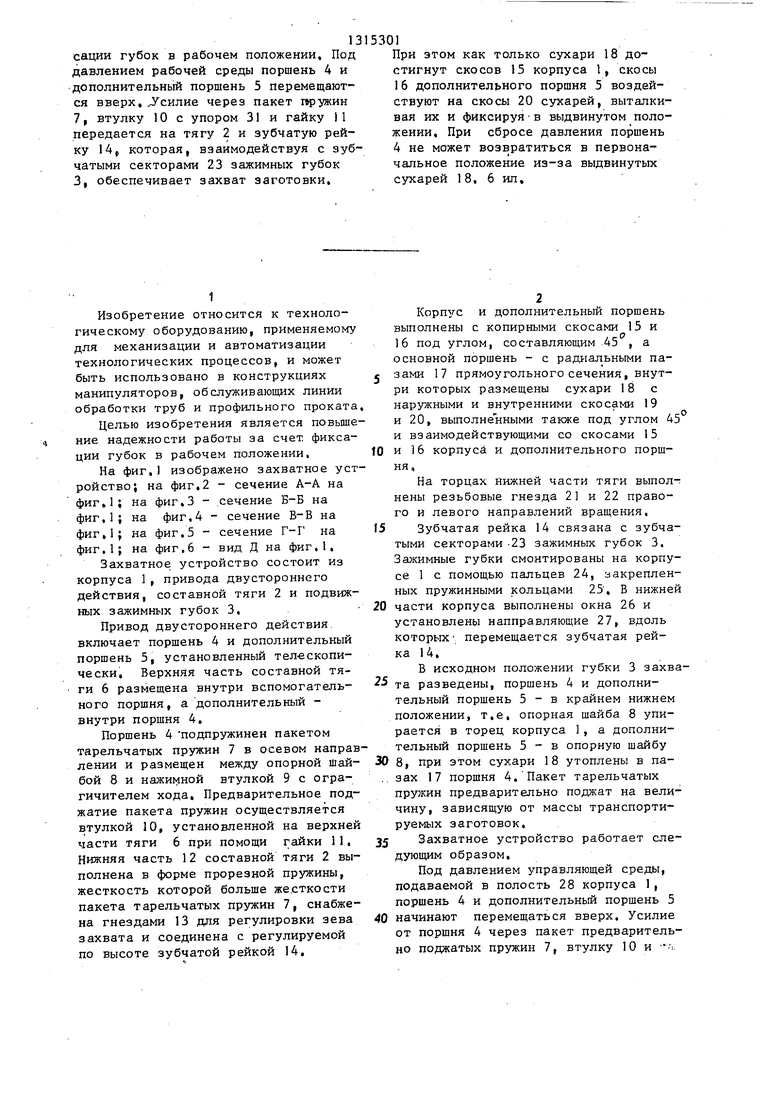
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1987 |
|
SU1437218A2 |
| Захватное устройство | 1987 |
|
SU1504091A1 |
| Захват манипулятора | 1982 |
|
SU1033310A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| ЗАЖИМНОЙ ПАТРОН СТАНКА ДЛЯ ОБРАБОТКИ ТРУБЧАТОЙ ВРАЩАЮЩЕЙСЯ ЗАГОТОВКИ | 2012 |
|
RU2569265C1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Захват | 1980 |
|
SU905061A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
Изобретение относится к технологическому оборудованию, в частности к манипуляторам, обслуживающим линии обработки труб и профильного проката. Целью изобретения является повышение надежности работы за счет фикJff 3f (Л со ел СО о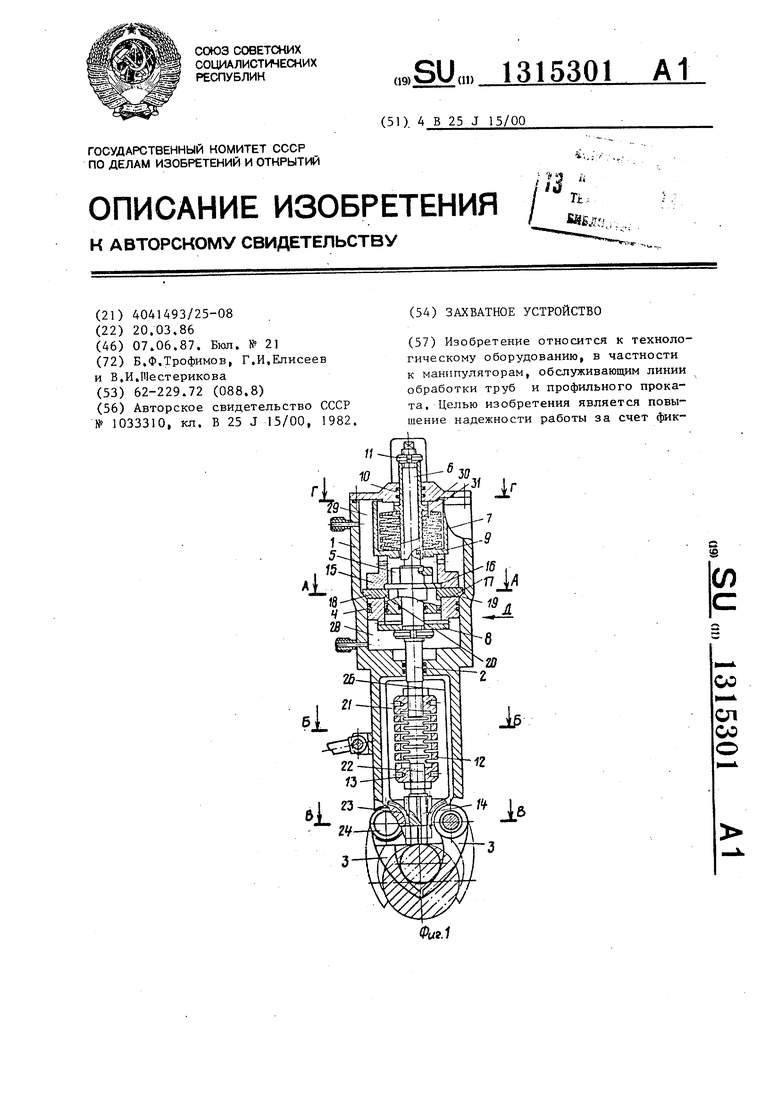
ФигЛ
Фиг. 5
Bad Л
Фаг. 6
| Захват манипулятора | 1982 |
|
SU1033310A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
