./
Изобретение относится к подъемно-тран- сйортному оборудованию.
Цель изобретения - повышение надеж- нЬсти и удобства эксплуатации.
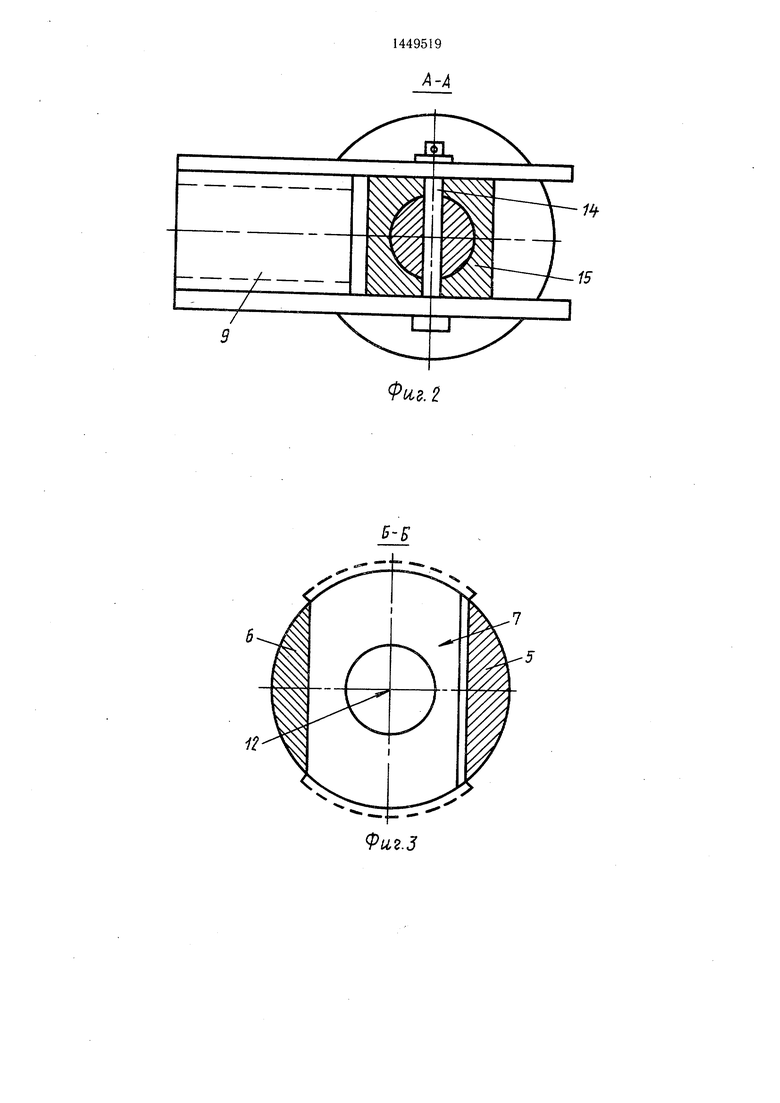
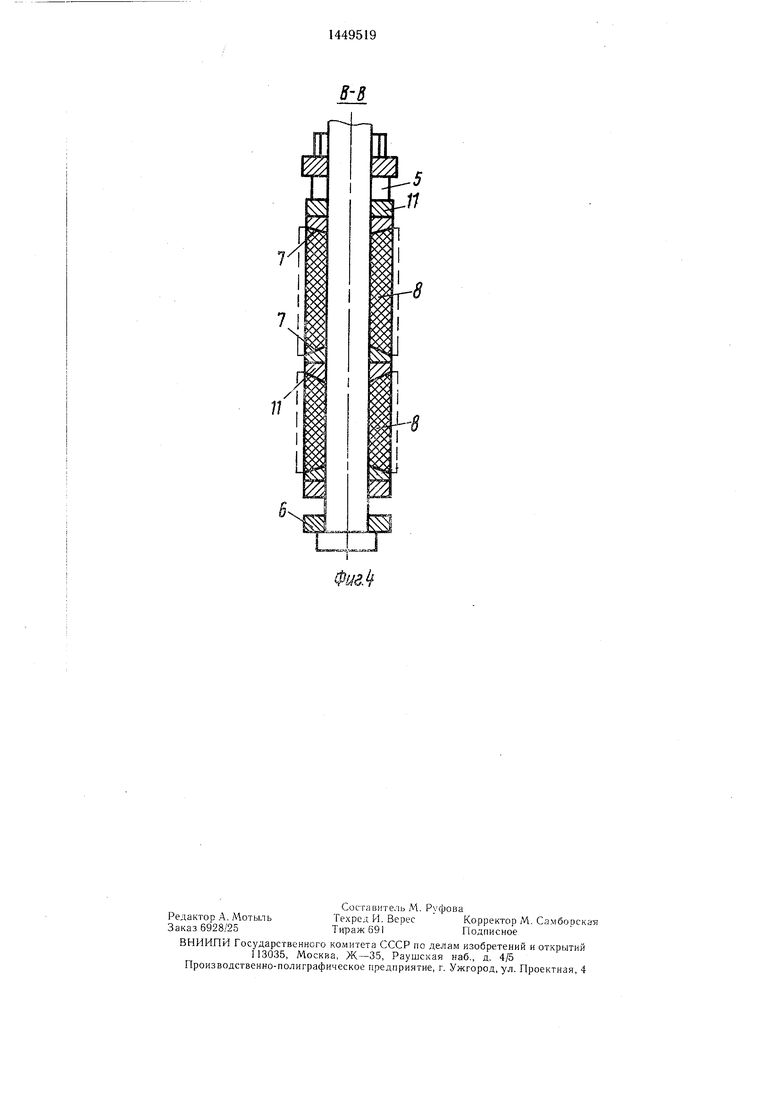
На фиг. 1 изображено устройство, об- п.|.ий вид в разрезе; на фиг. 2 - разрез А|-А на фиг. 1; на фиг. 3 - разрез Б-Б не фиг. 1; на фиг. 4 - разрез В-В на фиг. 1.
Устройство для захвата изделий с центральным отверстием содержит центральную итангу 1 с буртиком 2, резьбовой нарезкой 3 и продольным пазом 4.,. подвижный 5 и неподвижный 6 пуансоны с рабочими поверх- н)стями 7, захватные элементы 8 из упругого материала, например резины, механизм 9 фиксации положения подвижного пуансо- на 5 и грузовую серьгу 10.
Подвижный 5 и неподвижный 6 пуансоны О1инаково выполнены в виде стойки с попе- р чными выступами 11. Рабочие поверхности 7 выступов 11 выполнены с взаимообрат- н эш уклоном и при сборке устройства встреч- HD направлены. Упругие грузозахватные эле- MkiHTbi 8 установлены между рабочими по- в рхностями 7 выступов 11.
I В выступах пуансонов и упругих захват- н)1х элементах выполнены отверстия 12 для и|танги 1. Шаг расположения выступов 11 н|а пуансонах 5 и 6 кратен толщине захватываемых язделий.
Механизм 9 фиксации выполнен в виде эксцентрика 13 с двумя рабочими поверхностями. Эксцентрик 13 шарнирно установ- Л)Е;Н на штанге 1 посредством пальца 14, проходящего сквозь втулку 15, установленную Ни резьбовой нарезке 3 штанги 1. Для осу- п|1ествления поворота эксцентрик 13 снабжен гнездом 16. Настройку механизма 9 фик- сйции на заданное усилие захвата изделий осуществляют посредством проворачивания вЬ улки 15 относительно штанги 1 и их взаимной фиксации посредством пальца 14, проходящего сквозь продольный паз 4 штанги 1.
Механизм 9 фиксации посредством подвижной втулки 15 настраивают на заданное усилие захвата изделия. Затем при поднятом положении эксцентрика 13 помещают пуансоны 5 и б внутрь отверстия груза. Посредст
0
5
5
5
0
35
40
вом удлинителя, вставленного в гнездо 16, поворачивают эксцентрик 13. Это приводит к продольному сжатию захватных элементов 8 подвижным пуансоном 5 и поперечному распору их в отверстии захватываемого изделия.
Рабочая поверхность выступов 11 пуансонов, выполненная с уклоном, способствует осуществлению направленной деформации грузозахватных элементов 8, что исключает местные заклинивания. Шаг расположения выступов 11 пуансонов, соответствующий толщине захватываемых изделий, позволяет одновременно захватывать каждое изделие, если оно в пакете.
Освобождение изделия от устройства осуществляют в обратной последовательности.
Формула изобретения
Устройство для захвата изделий с центральным отверстием, содержащее щтангу с серьгой для подъемного механизма, два полых пуансона, соосно установленных на щтанге, один - с возможностью продольного перемещения, а другой - неподвижно, упругий захватный элемент, закрепленный между пуансонами, и механизм фиксации положения подвижного пуансона, установленный в верхней части щтанги, отличающееся тем, что, с целью повыщения надежности и удобства эксплуатации, пуансоны выполнены в виде стоек, снабженных с одной стороны поперечными, с одинаковым наклоном, выступами, размещенными с чередованием и возможностью контактирования нижних поверхностей выступов неподвижного пуансона с верхними поверхностями выступов подвижного пуансона и имеющими отверстия для щтанги, при этом упругие захватные элементы расположены между выступами, а механизм фиксации положения подвижного пуансона представляет собой эксцентрик, шарнирно, с возможностью взаимодействия с верхним выступом подвижного пуансона, закрепленный на штан1 е.
15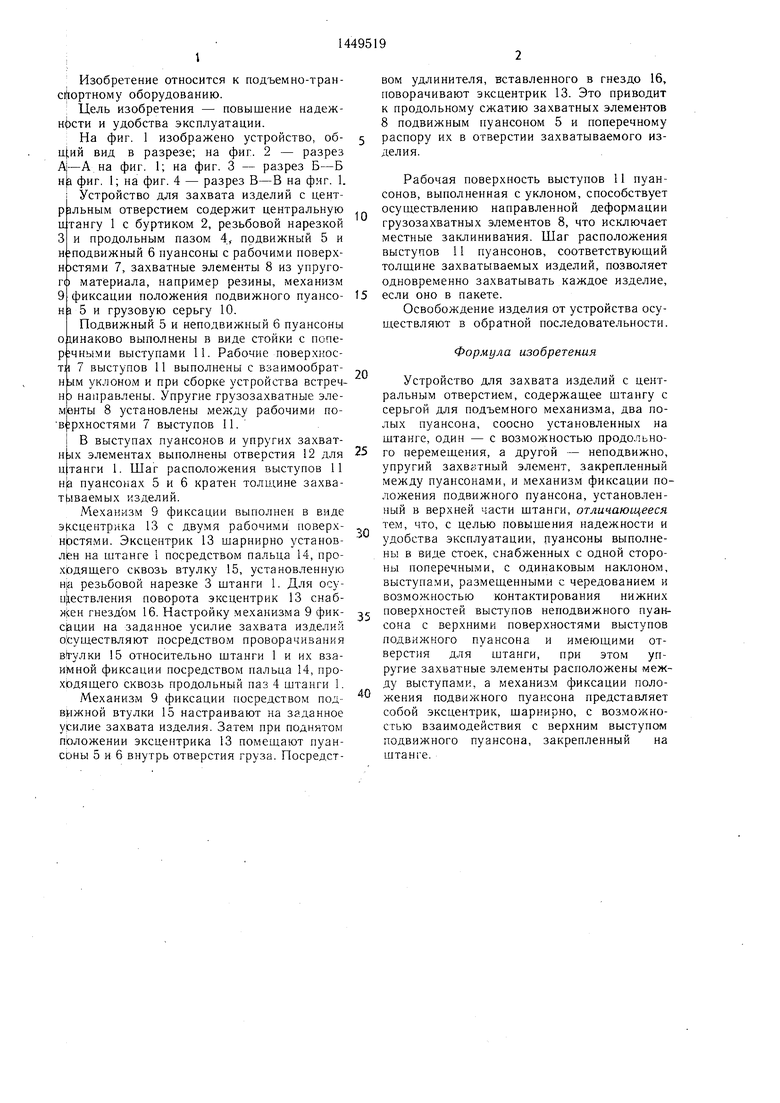
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1988 |
|
SU1594113A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА И ВЫДАЧИ БУРОВЫХШТАНГ | 1979 |
|
SU825845A1 |
| Захват для изделий с центральным отверстием | 1986 |
|
SU1409572A1 |
| Грузозахватное устройство | 1979 |
|
SU885138A1 |
| Захват для изделий с отверстием | 1989 |
|
SU1794854A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Захват для изделий с внутренней полостью | 1987 |
|
SU1463696A1 |
| Устройство для захвата штучных грузов | 1980 |
|
SU893807A1 |
| Грузозахватное устройство | 1985 |
|
SU1350099A1 |
| Рычажно-эксцентриковый захват | 1986 |
|
SU1440850A1 |
Изобретение относится к устройствам для за.хвата изделий с центральным отверстием. Цель изобретения - повышение надежности и удобства эксплуатации. Устройство содержит штангу I, подвижный 5 и неподвижный 6 пуансоны, упругие захватные элементы 8, механизм 9 фиксации положения подвижного пуансона 5, выполненный в виде эксцентрика 13, грузовую серьгу 10. Пуансоны 5 и 6 выполнены с поперечными выступами 1 с одинаковым наклоном и отверстиями 12 для штанги И. При поднятом положении эксцентрика 13 механизма 9 фиксации помещают пуансоны 5 и 6 внутрь отверстия груза. Затем эксцентрик Гз поворачивают. Это приводит к перемещению подвижного пуансона 5 вниз и сжатию захватного элемента 8, в результате чего последний з 1хватывает изделие. Освобождение изделия от устройства осуществляют в обратной последовательности. 4 ил.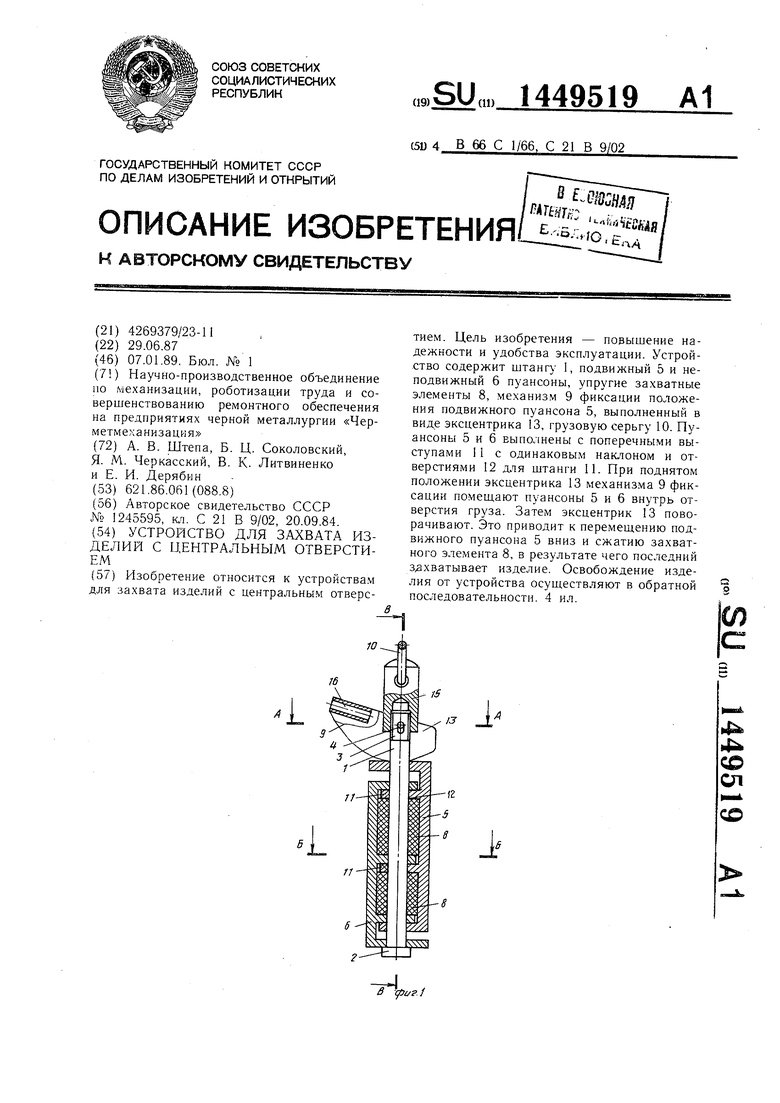
.2
9il2.3
| Устройство для захвата изделий со сквозным отверстием малого диаметра | 1984 |
|
SU1245595A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
