Изобретение относится к робототехнике, в частности к средствам оснащения гибких автоматизированных производственных систем.
Целью изобретения является распш- рение фзшкциональных возможностей путем использования сдвоенных мотор- колес для манипулирования перевозимым грузом.
На фиг. 1 представлен подвижный транспортньй робот, вид сбоку; на фиг. 2 - то же, вид сверху| на ,фиг. 3 - узел I на фиг. 1,
Транспортный робот состоит из рамы, вьшолненной из трех частей: носителя 1 (фиг. 1) и двух поворотных в горизонтальной плоскости звеньев 2 и 3, связанных с носителем 1 при помощи вертикальных В1)ащательных шарниров 4 и 5 соответственно. На носителе 1 и звеньях 2 и 3 установлены сдвоенные мотор-колеса 6 (фиг.1). На носителе 1 установлено устройство 7 управления транспортным роботом, а на звеньях 2 и 3 - грузовые платформы 8,на которых могут размещаться объекты 9 транспортировки. Мотор-колеса 6, содержащие по два сроено расположенных колеса 10 и 11 (фиг.З) оснащенных собственными приводными электродвигателями 12 и 13, установлены в вилке 14, имеющей возможность вращаться относительно шасси вокруг вертикальной оси. Для определения , угла разворота оси о(-г/ мотор-колеса 6 относительно шасси звенья 1-3 оснащены датчиками 15 угла поворота, например потенциометрами. Вращательные вертикальные кинематические пары соединения мотор-колес 6 со звеньями 2 и 3 выполнены в виде винтовой пары, причем винт 16, установленный в подшипниковом узле звена 2 в нижней части, жестко связан с вилкой 14 мотор-колеса 6, а в верхней части - с датчиком 15 положения. На винте 16 установлена гайка 17, несущая вертикальную штангу
18s на верхней части которой установ лена грузовая платформа 8. Для исключения возможности поворота штанги 18 относительно винта 16 звено 2 (3) оснаи(ено вилкой 19,, охватывающей снаружи штангу 18, Мотор-колесо -6, установленное на носителе 1, в юбщем случае может только однооборот- ную вращательную кинематическую па„
10
15
20
25
30
35
40
45
50
55
ру, так как нет необходимости осуществлять подъем (опускание) устройства 7 управления.
Устройство работает сл едующим образом.
При перемещении транспортного робота по пространству цеха его составные части (звенья 2 и 3 с грузовыми платформами 8) повернуты в положение, изображенное сплошными линиями на фиг. 2, Если перемещение происходит вдоль оси X, оси всех мотор-колес 6 параллельны оси Y. Это расположение мотор-колес 6 обеспечивается командами устройств 7 управления по информации
. от датчиков 15 угла разворота мотор- колес 6 относительно щасси, причем векторы тяговых усилий колес 10 и 11 мотор-колес6 при этом параллель;Ны оси X, Повороты (развороты) TpaHq- портного робота обеспечиваются со- ответствздощим разворотом мотор-колес 6 относительно своих вертикальных осей так, чтобы центр мгновенных скоростей вращения всех колес 10 и
11совпадал с центром кривизны траектории робота (разворота), После перемещения (разгрузки) грузовой платформы 8 объектом 9 манипулирования робот останавливается, после чего производится поворот соответствующего звена, например звена 2,
из транспортного положения в положение манипулирования (фиг. 2, штрих- пунктирной линией). Это производится следующим образом. Устройство 7 управления выдает команды с различным знаком на работу электродвигателей
12и 13 мотор-колеса 6 звена 2 так, чтобы векторы тяговых усилий колес 10 и 11 бьши направлены в противоположные стороны. При этом ось с , мотор-колес 6 начинает поворачиваться в горизонтальной плоскости.
Это вращение происзодит до тех пор, пока датчик 15 не вьщаст информацию о том, что ось о(-о пересекается с вертикальной осый шарнира 4, В этот момент работа двигателей 12 и 13 прекращается, после чего устройство 7 управления выдает команду на вращение колес 10 и 11 в одну сторону, направленную от оси транспортного робота наружу. При этом происходит поворот -звена 2 с грузовой платформы 8 в горизонтальной плоскости в положение загрузки (выг
3
рузки). После завершения этого поворота вращение колес 10 и 11 прекращается и транспортный робот готов к загрузке, т.е. к снятию грузовой платформой 8 объекта 9 манипулирования с внешнего, устройства, на котором установлен объект 9. Процесс загрузки производится переключением знаков работы электродвигателей 12 и 13 колес 10 и 11 по команде устройства 7 управления. При этом в вращательное движение приводится винт 16, а гайка 17, удерживаемая от вращения вокруг винта 16 штангой 18 и вилкой 19, начинает подъем по винту 16, перемещая при этом и грузвую платформу 8 на величину h. При этом подъеме ловители грузовой платформы 8 входят в ответные гнезд объекта 9 манипулирования и, поднимая его еще вьше, грузовая платфорт ма производит полный съем объекта 9 манипулирования с внешней позиции загрузки. Информацию о выполнении операции подъема гайки 17 на высоту h вьщает датчик 15, после чег режим вращения мотор-колеса 6 относ тельно собственной вертикальной оси заканчивается и можно приступить к к переводу звена 2 с объектом 9 манипулирования в транспортное положение. Этот режим соответствует описанному режиму откидьюания звена 2, но совершается в обратной последовательности. После завершения операции перевода звена 2 в транспортное положение устройство 7 управления выдает команду на все мотор-колеса б с целью поворота их осей ef в
0
5
0
0
5
0
f
положение, соответствующее перемещению транспортного робота.
Разгрузка грузовой платформы 8 производится в соответствии с описанными режимами и алгоритмами работы, но в противоположном направлении. Загрузка (разгрузка) грузовой платформы 8 звена 3 производится аналогично описанной загрузке (разгрузке) звена 2. Формула изобретения
Транспортный робот, содержащий раму, на которой посредством вертикальных вращательных кинематических пар установлены сдвоенные мотор-колес а, снабженные индивидуальными приводами колес,датчики угла поворота сдвоенных мотор-колес относительно рамы и установленные парами грузовые платформы, отличающийся тем, что, с целью расширения функциональных возможностей путем использования сдвоенных мотор-колес для манипулирования переводимым грузом, рама выполнена из трех звеньев, одно из которых снабжено двумя вер- тикальнътми шарнирами, каждый из которых связьтает с данным звеном по одному из двух других звеньев, которые снабжены по одному сдвоенному мотор-колесу, установленных на поворотной относительно рамы вертикальной оси, на средней части которой выполнена резьба, взаимодействующая с гайкой, жестко соединенной с помогцью вертикальной штанги с грузовой платформой и вьшолненной с возможностью вертикального перемещения.
фые.2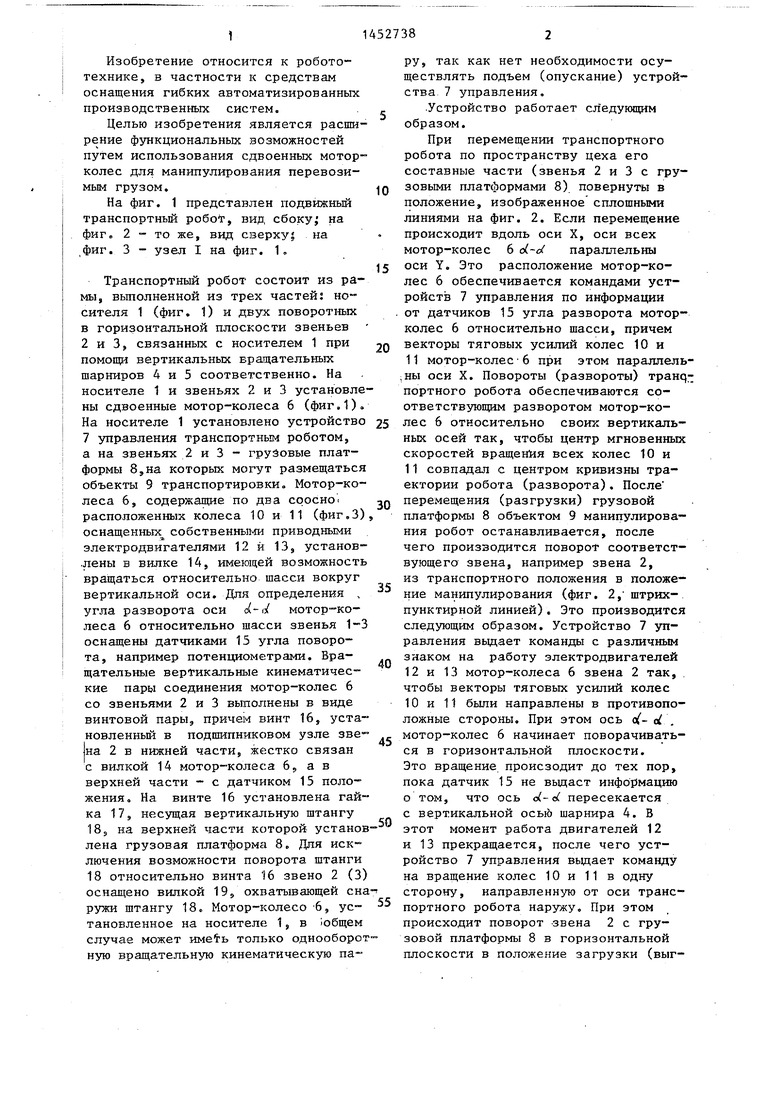

| название | год | авторы | номер документа |
|---|---|---|---|
| Высокомобильный транспортный робот для перемещения палетированных грузов | 2022 |
|
RU2798652C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Самоходное транспортное средство | 1990 |
|
SU1759678A1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2226473C2 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| Мобильное роботизированное шасси для надреза мульчирующей пленки над растением с последующей ее фиксацией | 2022 |
|
RU2785580C1 |
| Робот-погрузчик сеток с овощами | 2019 |
|
RU2722747C1 |

Изобретение относится к робототехнике, в частности к средствам оснащения гибких автоматизированных производственных систем. Цель изобретения - расширение функциональных возможностей путем использования сдвоенных мотор-колес для манипули- . рования перевозимым грузом. Транспортный робот содержит раму, на которой с помощью вертикальных вращательных кинематических пар установлены сдвоенные мотор-колеса. Мотор- колеса имеют два соосно расположенные колеса, каждый из которых снабжен самостоятельным приводом. Угол поворота мотор-колес относительно .шасси определяют датчики угла поворота. Рама транспортного робота выполнена в виде механизма, состоящего из трех звеньев, одно из которых несет на себе два вертикальных вра- щательньк шарнира, связьтвающих с первым звеном два других поворотных в горизонтальной плоскости звена, несущих по одному сдвоенному мотор- колесу, соединение которых со своим поворотным звеном шасси вьтолнено в виде винтовой пары, причем винт связан со сдвоенньм мотор-колесом, а гайка - с грузовой платформой. 3 нп. с (Л СП tNd si Од 00
ФилУ
Составитель Г.Гандыбин Редактор Н.Рогулич Техред Л.Олийнык Корректор М.Васильева
Заказ 7124/12
Тираж 480
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР- 113035, Москва, Ж-35, Раушская наб., д. 4/5
:.А
Подписное
| Самоходное транспортное средство | 1986 |
|
SU1368222A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
