10
20
25
11368222
Изобретение относится к тран порт- ным средствам, а именно к тележкам с автоматическим управлением для пере-- возки различных грузов в условиях гибких производственных систем.
Цель изобретения - повышение маневренных качеств и расширение функциональных возможностей.
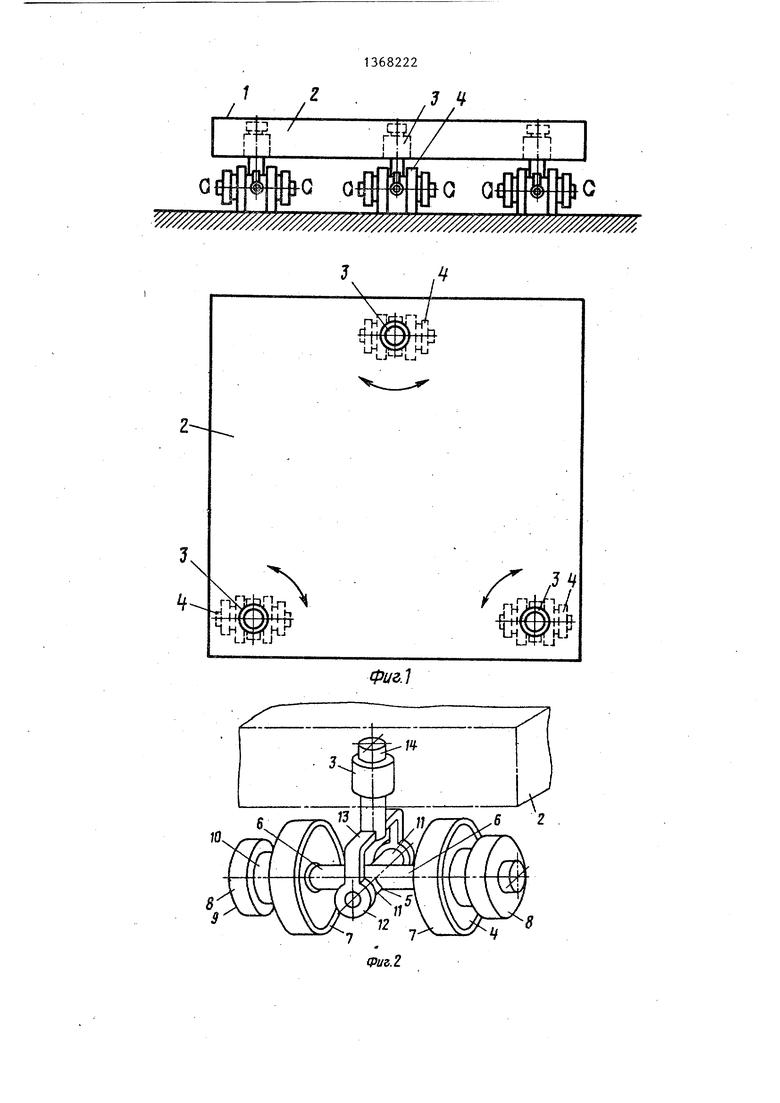
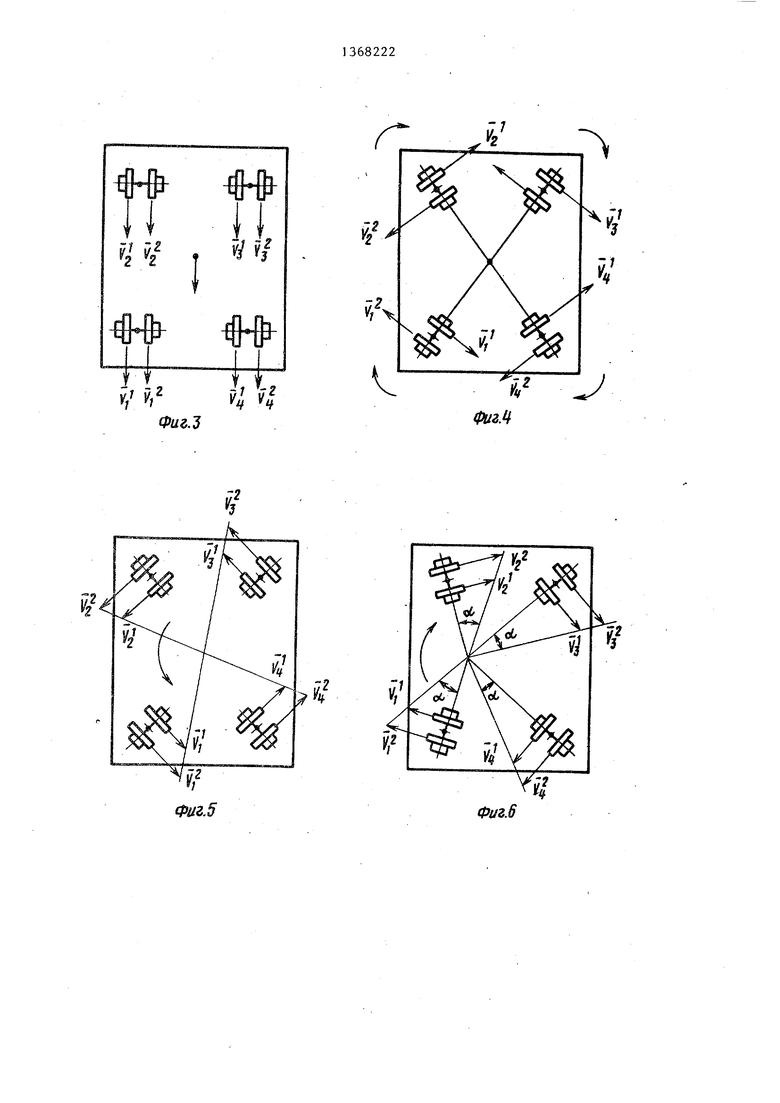
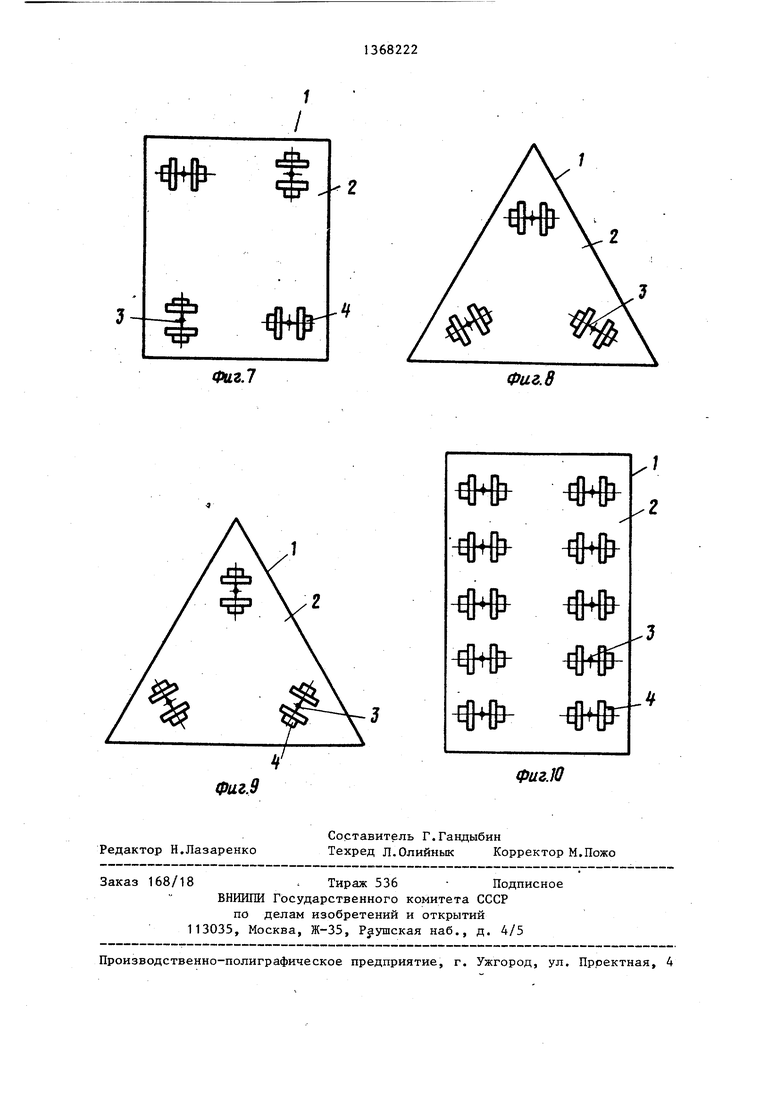
На фиг.- 1 показано самоходное трехколесное транспортное средство, на фиг. 2 - мотор-колесо-, на фиг. 3 - схема действия векторов скоростей при поступательном перемещении транспортного средства; на фиг, 4 - то е, при повороте транспортного средства в случае вращения дисков мотор- олес в противоположные стороны; на иг. 5 и 6 - то же,в случае вращения дисков мотор-колес в одну сторону с разньми угловыми скоростями; на фиг. 7-9 - схема разворота мотор- олес в случае затормаживания четырех- и трехколесного транспортных средствJ на фиг. 10 - схема многоопорного транспортного средства - трейлера.
Самоходное электромеханическое транспортное средство 1 содержит рау 2, с которой при помощи шарниров с вертикальной осью 3 вращени сое- инены мотор-колеса 4. Каждое мотор- колесо 4 состоит из крестовины 5, на одной оси 6 которой установлены ва опорных диска 7 с собственными электроприводами 8, каждый из которых состоит из двигателя 9 и силовой передачи 10. На второй оси 11 крестовины 5 установлены соосные вращательные кинематические пары 12, естко соединенные друг с другом и с осью 3 скобой 13. На каждой оси 3 установлен датчик 14 поворота мотор- колеса .4 ОТНОСИТЕЛЬНО рамы 2 в горизонтальной плоскости.
Мотор-колесо работает следующим образом.
При подаче питания вращение от электродвигателей 9 через силовые ередачи 10 передается опорным дискам 7. Возникающее при этом тяговое усилие через ось 6 крестовины 5 и ось 3 передается на раму 2 транспортного средства 1. В случае, если угловыко на g вы ку ва но в ня но тр
4 1Б ки по по
ле ве ту ле ми ны ле
по и ма вы ми
30
Ф
35
со са ст
40 го уп ч по ши
45 ка ча зо на ле
gQ во ша св сн от
вые скорости опорных дисков 7 одинаковы, тяговое усилие постоянное по направлению. В случае разности угло- вых скоростей опорных дисков по знаку появляется момент сил, разворачивающих мотор-колесо 4 в горизонтальной плоскости относительно рамы 2, в результате чего тяговое усилие меняет свое направление и соответственно поворачивается (разворачивается) транспортное средство.,
Соединение оси 3 с мотор-колесом 4 через горизонтальные вращательные кинематические пары 12 обеспечивает постоянное касание опорных дисков с поверхностью пола.
Датчик 14 при повороте мотор-колеса 4 выдает сигнал соответствующей величине и знака, поступающий в контур обратной связи устройства управлений, которое, в свою очередь, формирует задание направления и величины скорости вращения для каждого колеса.
Схемы, приведенные на фиг. 3-9, показьшают взаимодействие мотор-колес и их опорных дисков при различных маневрах транспортного средства либо выполнение одного маневра различными способами.
Формула изобретения
Самоходное транспортное средство, содержащее раму, ходовые мотор-колеса, смонтированные на вертикальных стойках с возможностью поворота их в
горизонтальной плоскости, и систему управления мотор-колесами, отличающееся тем, что, с целью повышения маневренных качеств и расширения функциональных возможностей,
каждая вертикальная стойка в нижней части снабжена расположенной в горизонтальной плоскости крестовиной, на концах одной оси которой установлены мотор-колеса с независимым приводом каждый, а на концах другой оси шарнирно установлена скоба, жестко связанная с вертикальной стойкой, снабженной датчиком ее угла поворота относительно рамы.
Z
my ж
I I /i i
a Q
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2226473C2 |
| Комбинированный движитель транспортного средства | 1981 |
|
SU1022855A1 |
| Транспортный робот | 1987 |
|
SU1452738A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ И ЛЮДЕЙ ПО ЛЕСТНИЦАМ И ПЛОСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2538408C1 |
| ПЕРСОНАЛЬНОЕ САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2006 |
|
RU2309716C2 |
| Транспортное средство | 1989 |
|
SU1708685A1 |
| Транспортное средство | 1980 |
|
SU876493A1 |
| Прицепное транспортное средство | 1981 |
|
SU962079A1 |
| Телемакетоскопический комплекс | 1990 |
|
SU1787287A3 |
| ТРЕХКОЛЕСНЫЙ САМОКАТ С ЗАДНИМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2008 |
|
RU2470820C2 |
Изобретение относится к транспортным средствам, а именно к тележкам с автоматическим управлением для перевозки различных грузов в условиях гибких производственных систем. Цель изобретения - повышение маневренных качеств и расширение функциональных возможностей. Изобретение содержит раму, с которой при помощи шарниров с вертикальной осью вращения соединены мотор-колесо. Каждое мотор-колесо состоит из крестовины, на одной оси которой установлены два опорных диска с собственными электроприводами, каждый из которых состоит из двигателя и силовой передачи. На второй оси крестовины установлены соосные вращательные кинематические пары, жестко соединенные друг с другом и с осью скобой. На каждой оси установлен датчик поворота мотЬр-колеса относительно рамы в горизонтальной плоскости. 10 ил. а S (Л
LJ
-J
U
HJ
L-i
JH
n
J
k.
LH T|(T n.j .J
Фиг.1
8
К/ к, 2
1 Ч
Фиг.
ФигМ
Фиг.б
х
.
ФигЛ
Фиг. 8
| Самоходное транспортное средство | 1984 |
|
SU1154137A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
