4;: О 00 N5
СО 4:
Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точности взвешивания.
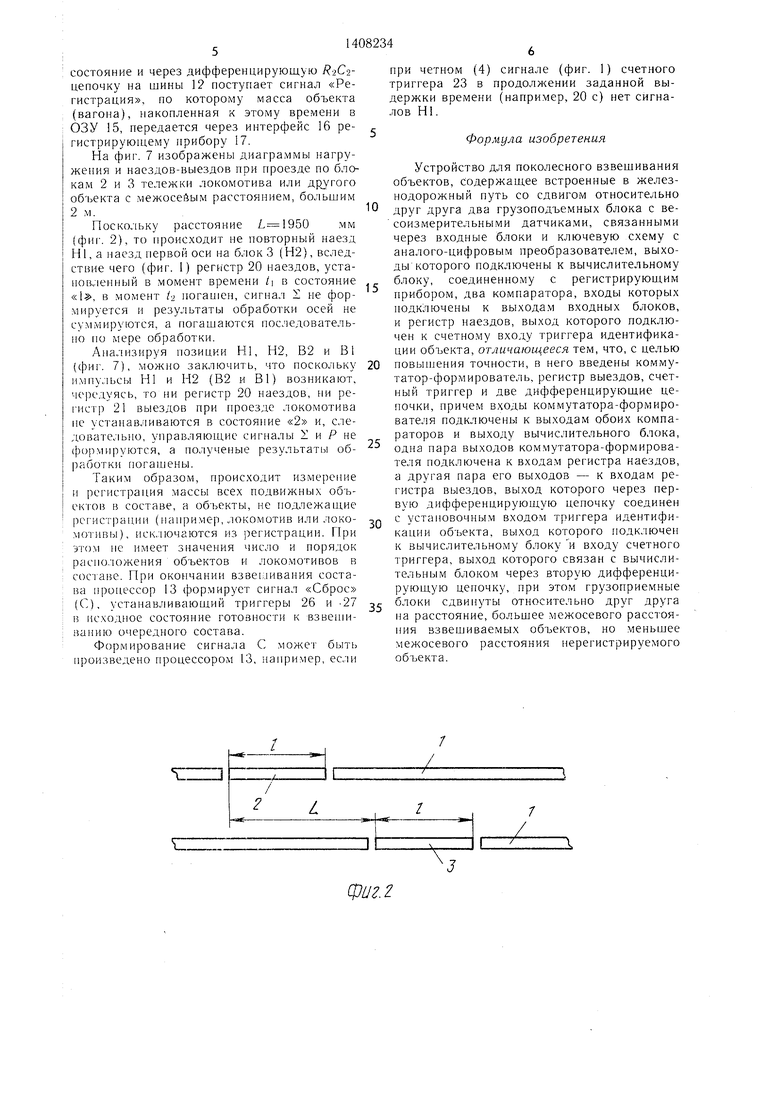
На фиг. 1 изображена блочно-кинема- тическая схема устройства; на фиг. 2 - рас- |положение грузоприемных блоков, план; на фиг. 3 - электрическая принципиальная jcxeMa коммутатора-формирователя; на 1фиг. 4-7 - графики, поясняюш.ие работу устройства при проезде по грузоприемным блокам различных подвижных объектов; |на фиг. 8 - геометрические размеры вагонов и локомотивов отечественного парка.
Устройство для поколесного взвешивания
вычислительного блока 11 команду «Регистрация (Р).
Левый и правый грузоприе.мные блоки 2 и 3 (фиг. 2) длиной 1300 мм каждый расположены нч железнодорожном пути 1 таким образом, что начало блока 2 сдвинуто относительно начала блока 3 на расстояние мм, большее типового межосевого расстояния (1800-1850 мм) подавляющего большинства вагонов отечественного парка, но меньшее типового межосевого расстояния (2100-2200 мм) подавляющего большинства отечественных локомотивов (фиг. 8).
объектов содержит встроенные в железнодорожный путь 1 левый и правый грузопри- емные блоки 2 и 3 (фиг. 1), которые прикрепляются к фундаментным блокам 4 струнками 5 и опираются на тензодатчики 6 и 7, связанные через входные блоки 8 и ключевую схему 9 с аналого-цифровым преобразователем 10, информационные выходы которого соединены с вычислительным блоком 11, содержащим шины 12 данных, адреса и управления, центральный процессор 13, постоянное запо1у1инающее устройство (ПЗУ) |14, оперативное запоминающее устройство |(ОЗУ) 15 и интерфейс 16 связи с регистри- рующим прибором 17, например цифропе- чатающим устройством. Входы коммутатора-формирователя 18 |через компараторы 19 соединены с выходами блоков 8, а выходы - с входами регистра 20 |наездов и регистра 21 выездов объемом в 2 |единицы каждый. Выход регистра 20 непосредственно, а выход регистра 21 через пер- |вую дифференцирующую y iCi-цепочку -со- единены с установочными входами тригге- |ра 22 идентификации объекта, выход кото- iporo подключен к шинам 12 и к входу счетного триггера 23. Выход триггера 23 через вторую дифференцирующую аСа-цепочку также связан с щинами 12, организуя для
Длина мм выбрана с целью на- гружения грузоприемных блоков 2 и 3 только одной осью вагона или локомотива и лими- 55 тируются межосевым расстоянием d 1450 мм (фиг. 8) между второй и третьей осями тележки восьмиосного вагона.
0
5
5
0
0
5
0
5
0
5
Коммутатор-формирователь 18 (фиг. 3) содержит схемы 24 и 25 совпадения, триггеры 26 и 27 левого и правого направления, коммутатор 28, выходы которого Б1 («Первый блок) и Б2 («Второй блок) подключены к формирователям наезда на резисторах Rs-Re и емкостях Сз и С непосредственно, а к формирователям выезда на резисторах и емкостях Cs и Се - через инверторы 29.
Устройство работает следующим образом.
В исходном состоянии (фиг. 1) грузо- приемные блоки 2 и 3 свободны от груза. Начальный сигнал тензодатчиков 6 и 7 поступает через входные блоки 8 и ключевую схему 9 на аналого-цифровой преобразователь 10.
Цифровые коды, соответствующие начальным выходным сигналам тензодатчиков, поступая через шинь 12 в вычислительный блок 11, обрабатываются (усредняются) последним и запоминаются в ОЗУ 15. Измерения нулевого уровня повторяются периодически и результат в ОЗУ 15 обновляется.
Предположим, в произвольный момент времени на блок 2 наезжает первое колесо состава, т. е. слева (фиг. 1) на блоки 2 и 3 наезжает состав. При этом тензодатчик 6 блока 2 нагружается и сигнал с верхнего (фиг. 1) компаратора 19 поступает (фиг. 3) на схему 24 совпадения и триггер 26, вызывая возбуждение последнего. Триггер 26, .возбуждаясь, запрещает на все время движения данного состава прохождение сигналов «Правый блок (ПБ) через схему 25 совпадения и, кроме того, открывает верхние (фиг. 3) схемы коммутатора 28, так что на все время движения данного состава блоку 2 присваивается номер 1, а блоку 3 - номер 2 (на фиг. 2-7 Б1 и Б2). При необходимости с выхода триггера 26 в вычислительный блок 11 подается команда «Движение правое (П).
Пусть первым в составе движется четырехосный вагон. Диаграммы нагружений блоков 2 и 3 при проезде первой тележки четырехосного вагона представлены на фиг. 4 позициями ЛБ («Левый блок) и ПБ («Правый блок).
Поскольку нагруженным состояниям блоков 2 и 3 соответствует нулевой сигнал на соответствующих выходах коммутатора 28, то эпюры сигналов 51 и Б2 (не показаны на фиг. 4-7) инверсны позициям ЛБ и ПБ.
В момент t (фиг. 4) наезда на блок 2 первой оси на выходе Б1 коммутатора 28 возникает переход от единичного потенциала к нулевому. Соответственно, формирователем наезда на емкости Сз и резисторах и формируется короткий импульс наезда (позиция HI, фиг. 4).
Сигнал наезда HI поступает на счетный вход регистра 20 наезда (фиг. 1 вая его в состояние «1.
Кроме того, сигнал HI поступает на шины 12 вычислительного блока 11, вследствие чего процессор 13 начинает обработку сигнала тензодатчика 6 по одному из известных алгоритмов, записанных в ПЗУ 14. Обработ- ка заканчивается в момент времени 2, т. е. по выезду первой оси объекта с блока 2. Результат обработки по первой оси запоминается в ОЗУ 15.
В момент 2 выезда первой оси с блока 2 формирователь выезда на емкости Cs и ре- зисторах и RS формирует импульс выезда (позиция В1, фиг. 4).
В момент /3 вторая ось объекта наезжает на блок 2, формируется второй подряд импульс наезда (позиция HI, фиг. 4). Начи- нается обработка сигнала тензодатчика 6, нагружаемого второй осью объекта.
Одновременно вторым импульсом регистр 20 наездов устанавливается в состояние «2 (фиг. 1), возбуждая триггер 22 идентификации, с выхода которого на ши- ны 12 вычислительного блока 11 поступает сигнал 2, в соответствии с которым результат обработки по первой оси (запомненный ранее в ОЗУ 15) и результаты обработки по другим осям объекта суммируются по программе, записанной в ПЗУ 14 до появления на шинах 12 сигнала «Регистрация (Р).
Таким образом, обработка сигнала тензодатчика 7 блока 3 начинается соответственно в моменты времени /4 и /е и заканчивается к моменту времени tj (фиг. 4) выезда второй оси первой тележки объекта с блока 3.
В моменты времени /5 и / формирователем на емкости Се и резисторах Rg и Rio формируются два подряд импульса выезда с второго блока (В2), устанавливаюших регистр 21 выезда в состояние «2, вследст- вие чего в момент времени tj через диффе- ренцируюшую / |С 1-цепочку на вход гашения R триггера 22 поступает короткий импульс, устанавливающий последний в исходное состояние (позиция S на фиг. 4).
Задним фронтом импульса 2 возбуждается счетный триггер 23. Заметим, что к моменту /7 в ОЗУ 15 запомнена масса первой тележки объекта как сумма результатов обработки по всем осям (в случае четырехосного объекта в соответствии с фиг. 4 сумма четырех слагаемых).
Как следует из фиг. 2, обшая длина грузоприемного механизма ,3 м, а расстояние первой и второй тележками D (фиг. 8) подавляюшего большинства вагонов отечественного парка более 5,4 м, поэтому при взвешивании третьей и четвертой осей четырехосного объекта (т. е. второй тележки) диаграммы (фиг. 4) повторяются, но к моменту выезда четвертой оси с блока 3 (т. е. к моменту окончания второго сигнала 2) в ОЗУ 15 запомнена масса всего объекта как сумма результатов обработки по все.м его осям.
5
0 5
0
5
0
5
0
5
. Кроме того, по выез де второй голсжкп (т. е. в момент окончания второго ciinia.ia 2) счетный триггер 23 (фиг. П устанав.пивается в исходное состояние и через дифференцирующую У 2Со-иепочку на нишы 12 поступает сигнал Р, по которому результат (масса объекта) из ОЗУ 15 через интерфейс 16 передается в регистрирующий прибор 17.
Предлагаемое устройство пр авпльно функционирует и в том случае, если расстояние ме)ду первой и второй тележками объекта DI (ф иг. 8) менее 5,4 м (например, если состав состоит из агловозов или друшх объектов с малой базой). Важно только, чтобы второй наезд И первой те,1ежки последующего объекта не произо1лел ранее второго выезда В2 второй тележки предыдущего объекта. Как показывает расчет, такая нарушающая работу устройства ситуация может произойти то,1ько при расстоянии между тележками соседних объектов, меньшем 1,3 м, что не встречается в отечественном парке (наименьшее расстояние 2,4 м),
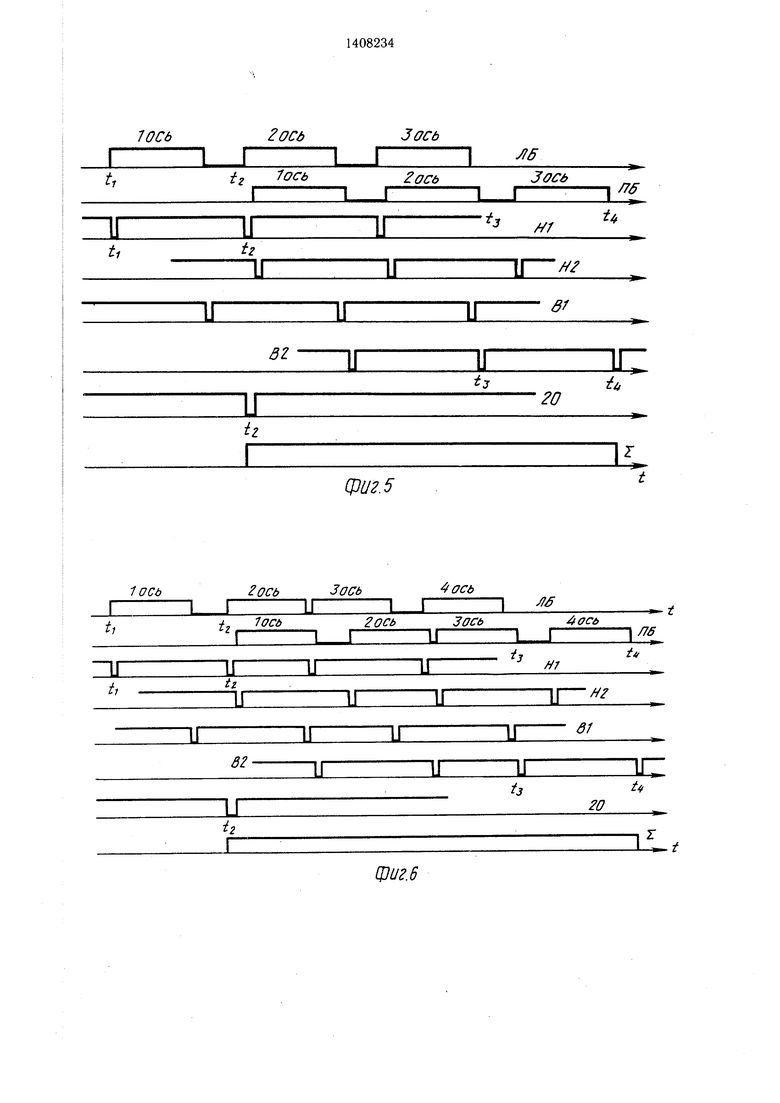
На фиг. 5 изображены диаграммы нагру- жений блоков 2 и 3, формирования наездов- выездов, формирования сигнала д, 1я случая проезда по б,1окам 2 и 3 тележки типового трехосного объекта. На . 6 диаграммы повторены для случая тележки восьмиосного вагона (в обоих случаях для правого движения) .
Диаграммы (фиг. 5 и 6) аналогичн;) в смысле формирования сигнала 2 диаграмме (фиг. 4). Действительно, в моменты времени /I и ( происходят наезды первой оси ка- занных объектов на блок 2, при этом в момент /2 регистр 20 наездов (фиг. 1) устанавливается в состояние «2. возбуждается триггер 22 идентификации, с выхода последне1 О на шины 12 пост) пает сигнал i, по которому процессор 13 производит суммирование результатов обработки сигна.юв тензодатчи- . ков 6 и 7 но первой, второй и третьей осял: (фиг. 5) и по первой, второй, третьей и четвертой осям (фиг. б). В моменты времени /3 и /4 происходят подряд два выезда (позиции В2, фиг. 5 и 6) последних осей те,1еж( с блока 3, в MOMCi-iT времени /,; регистр 21 выездов (фиг. 1) устанавливается в сосгоя- ние «2 и через дифференцирующую цепочку триггер 22 идентификации Устанавливается в исходное состояние. К эт(1му нре- мени (/4) в ОЗУ 15 оказывается запомпемпоГ масса первой тележки объекта (как обработки по всем его осям по фиг. 5 и, d.
Одновременно в момент /4 задним ф)он- том илшульса 2 возбуждается счетный т)иг- гер 23.
Диаграммы нри проезде вторых те.южок шестиосного и восьмиосного объектов (вагонов) полностью идентичны диагра мам фиг. 5 и 6. При этом Б мо.мснт выезда июсгой (восьмой) оси об ьекта с б, 1ока 3, т. с. в момент вторичного окончания си|-пала i. счетный триггер 23 устанавливается в исходное
1408234
состояние и через дифференцирующую ценочку на шины 12 поступает сигнал «Регистрация, по которому масса объекта (вагона), накопленная к этому времени в ОЗУ 15, передается через интерфейс 16 регистрирующему прибору 17.
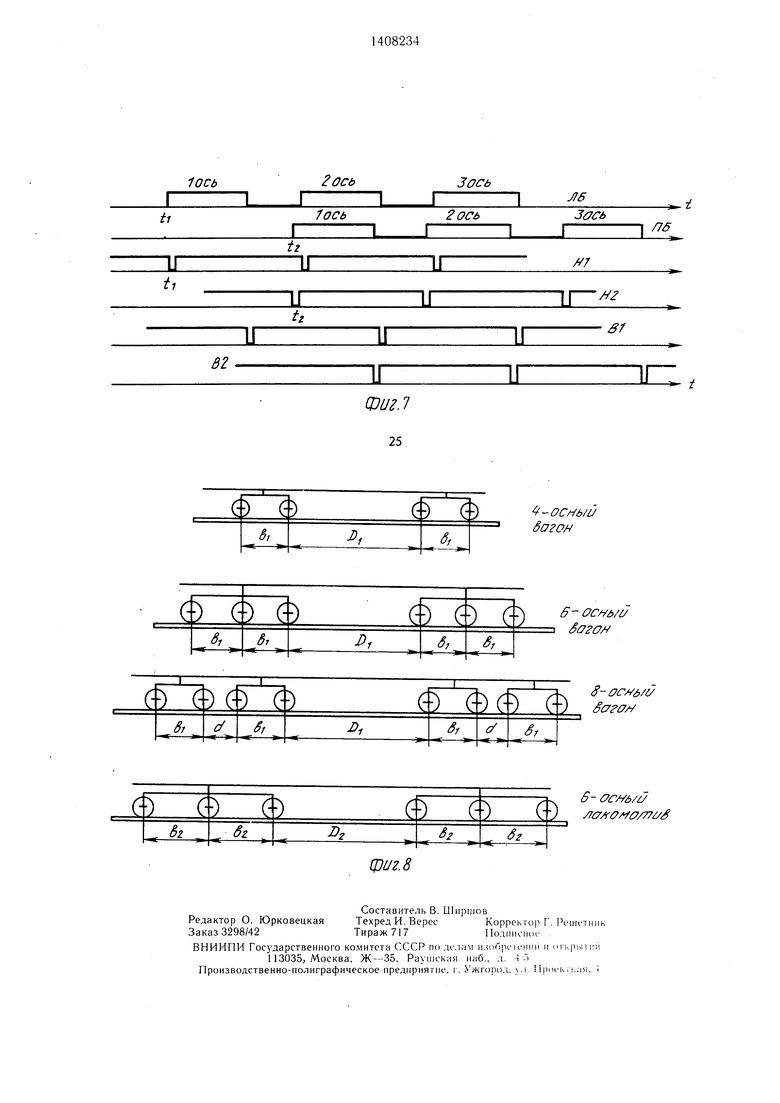
На фиг. 7 изображены диаграммы нагру- жения и наездов-выездов при проезде по блокам 2 и 3 тележки локомотива или другого объекта с межосейым расстоянием, большим 2 м.
Поскольку расстояние мм (фиг. 2), то ироис.ходит не повторный наезд HI, а наезд первой оси на блок 3 (Н2), вследствие чего (фиг. 1) регистр 20 наездов, установленный в момент времени t в состояние «1, в момент t-2 иогап1ен, сигнал 2 не формируется и результаты обработки осей не суммируются, а погашаются последовательно по мере обработки.
Анализируя позиции HI, Н2, В2 и В1 (фиг. 7), можно заключить, что поскольку импульсы HI и Н2 (В2 и В1) возникают, чередуясь, то ни регистр 20 наездов, ни ре- 1-истр 21 выездов при проезде локомотива не устанавливаются в состояние «2 и, следовательно, управляющие сигналы X и f не ((нормируются, а полученые результаты обработки погашены.
Таким образом, происходит измерение и регистрация массы всех подвижных объектов в составе, а об ьекты, не подлежащие регистрации (например, локомотив или локомотивы), исключаются из регистрации. При этом не имеет значения число и порядок расположения объектов и ЛОКОМОТИЕЮВ в составе. При окончании взвегаивания состава процессор 13 формирует сигнал «Сброс (С), устанавливающий триггеры 26 и -27 в исходное состояние готовности к взвешиванию очередного состава.
Формирование сигнала С может быть произведено процессором 13, например, если
5
0
5
0
5
6
при четном (4) сигнале (фиг. 1) счетного триггера 23 в продолжении заданной выдержки времени (например, 20 с) нет сигналов Н.
Формула изобретения
Устройство для поколесного взвешивания объектов, содержащее встроенные в железнодорожный путь со сдвигом относительно друг друга два грузоподъемных блока с весоизмерительными датчиками, связанными через входные блоки и ключевую схему с аналого-цифровым преобразователем, выхо- дьг которого подключены к вычислительному блоку, соединенному с регистрирующим прибором, два компаратора, входы которых подключены к выходам входных блоков, и регистр наездов, выход которого подключен к счетному входу триггера идентификации объекта, отличающееся тем, что, с целью повьинения точности, в него введены коммутатор-формирователь, регистр выездов, счетный триггер и две дифференцирующие цепочки, причем входы коммутатора-формирователя подключены к выходам обоих компараторов и выходу вычислительного блока, одна пара выходов коммутатора-формирователя подключена к входа.м регистра наездов, а другая пара его выходов - к входам регистра выездов, выход которого через первую дифференцирующую цепочку соединен с установочным входом триггера идентификации объекта, выход которого подключен к вычислительному блоку и входу счетного триггера, выход которого связан с вычислительным блоком через вторую дифференцирующую цепочку, при этом грузоприемные блоки сдвинуть относительно друг друга на расстояние, большее межосевого расстояния взвешиваемых объектов, но меньшее межосевого расстояния нерегистрируемого объекта.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поколесного взвешивания подвижных объектов | 1986 |
|
SU1372194A1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| Устройство для поосного взвешивания подвижного состава | 1986 |
|
SU1315822A1 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |
| Способ поосного взвешивания подвижных объектов | 1988 |
|
SU1522045A1 |

Изобретение относится к области весоизмерительной техники. Цель изобретения - повышение точности взвешивания. Устройство содержит грузоприемные блоки 2 и 3, ,S 1 тензодатчики 6 и 7, входные блоки 8, ключевую схему 9, аналого-цифровой преобразователь 10, вычислительный блок II, шины 12, процессор 13, запоминаюшие устройства 15 и 14, интерфейс 16, регистрирующий прибор 17. Введение коммутатора-формирователя 18, компараторов 19, регистра 20 наезда и регистра 21 выезда и образование новых связей между элементами устройства позволяет производить измерение и регистрацию массы всех подвижных объектов в составе, а объекты, не подлежаш,ие регистрации, исключить из регистрации. По окончании взвешивания состава процессор 13 формирует сигнал «Сброс, устанавливающий триггеры в исходное состояние готовности к взвешиванию очередного состава. 8 ил.
CpU2.Z
10Cb
2ocb
L
ti
ti t.
и
Л6
TOCb
2oCb
5
фиг Л
tl
ТОСЬ
2оСд
Фи2.5
Юсь
2ось
Зось
Зось
4 ось
Щиг.б
10Cb
2ось
Зось
Фиг л
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
