(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поколесного взвешивания объектов | 1986 |
|
SU1408234A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| Способ поосного взвешивания железнодорожных вагонов в движении | 1989 |
|
SU1749719A1 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для взвешивания железнодорожных вагонов в движении | 1987 |
|
SU1474475A1 |

Изобретение относится к весоизмерительной технике. Цель изобретения - повышение точности взвешивания . С помощью аналого-цифрового преобразователя (АЦП) 7 поочередно преобразуются в цифровые коды сигналы тензодатчиков 5 грузоприемных блоков 2 и 3. При изменении сигналов тензодатчиков 5, нагруженных осями, запел- ненные нулевые коды вычитаются из ре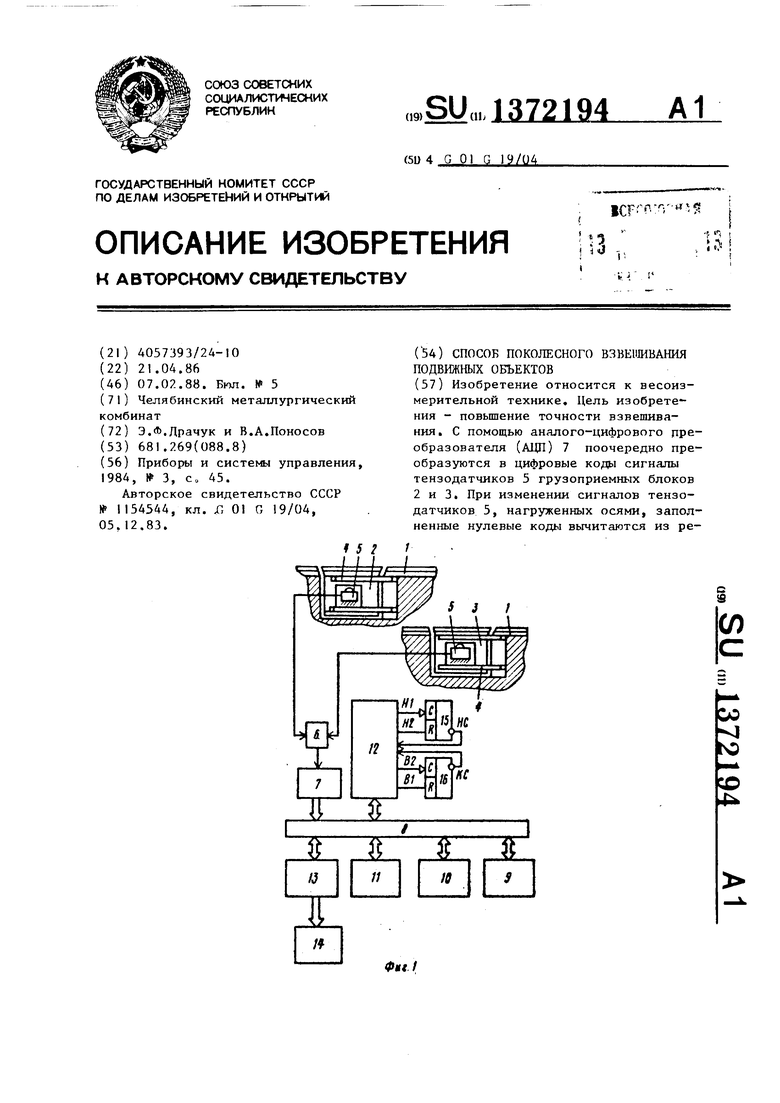
Фш(1
зультатов обработки по каждой оси. После наезда первым колесом состава, например, на грузоприемный блок ., выходной сигнал тензодатчика 5 возрастает. На выходе АЦП 7 возрастают цифровые коды, соответствующие грузо- приемному блоку 2. Измерив несколько значений кодов подряд, процессор 11 формирует команды Направление движения - левое, блок 2 - первый, блок 3 - второй, которые запоминаются в блоке 10. Одновременно с наезИзобретение относится к весоизмерительной технике и может быть применено для взвешивания грузов, перевозимых с помощью железнодорожного транспорта.
Целью изобретения является повьшш- ние точности взвешивания.
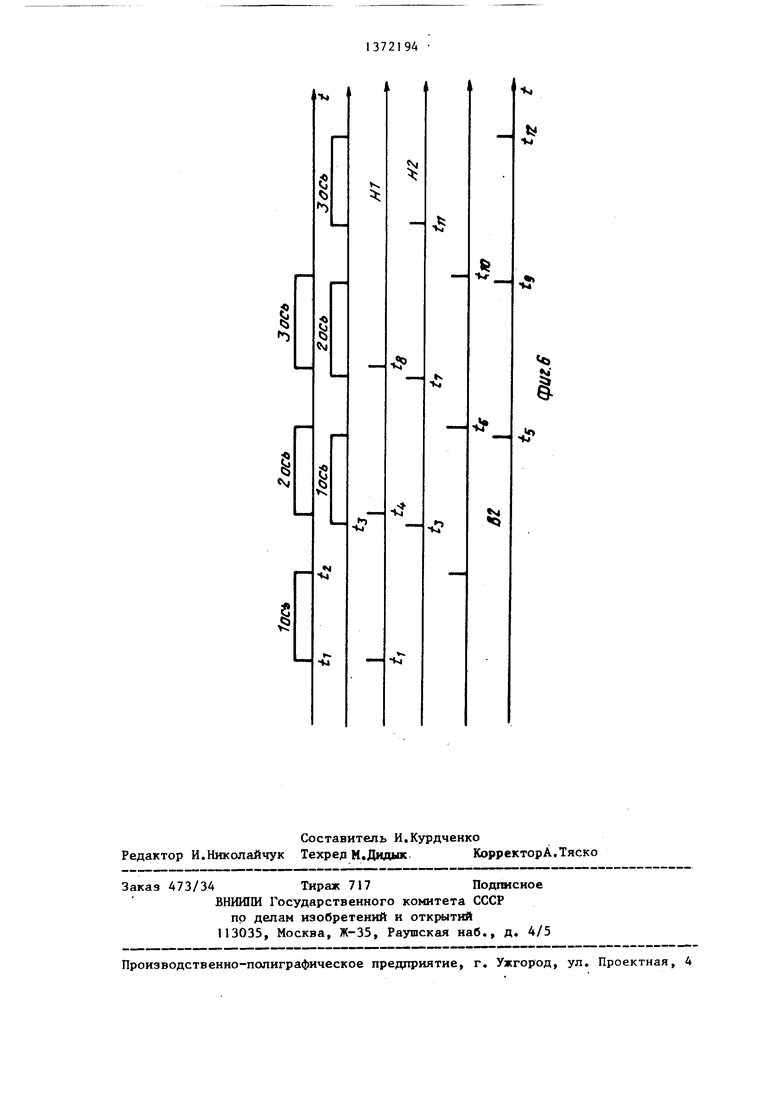
На фиг.I показана схема устройства, реализующего способ; на фиг.2 - грузоподъемное устройство, вид свер- ху; на фиг.3-6 - диаграммы нагружений грузоприемных блоков при взвешивании различных регистрируемых и нерегистрируемых объектов.
Способ поколесного взвещивания подвижных объектов предусматривает установку на железнодорожном пути I двух грузоприемных блоков 2 и 3 (встройка их в бетонные приямки показана на фиг.1).
Каждый грузоприемный блок фиксируется струнками 4 и опирается на тен- зодатчики 5, подключенные через ключевую схему 6 к аналого-цифровому преобразователю (АЦ11) 7, через шины 8 связанному с постоянным запоминающим устройством (ПЗУ) 9, оперативным запоминающим устройством (ОЗУ) 10, централыа1м процессором 1 1 и интерфейсом 12 ввода-вывода данных, С ши- ной 8 через интерфейс 13 регистрации связано терминальное устройство 14 (например, цифропечатающая машинка), С шинами интерфейса 12 соединены регистр 15 наездов и регистр 16 выез- дов, каждый объемом в две единицы.
Кроме того, обозначены сигнал HI наезда на первый (по ходу движения) блок 2,3; сигнал Н2 наезда на второй
дом процессор 11 начинает по одному из известных алгоритмов, записанных в постоянном запоминающем устр-ве 9, обработку кодов грузоприемного блока 2. .Результат обработки запоминается блоком 10 как масса первого левостороннего колеса. После проезда второй тележки объекта ее масса суммируется с запомненной ранее массой первой тележки, а результат через кц- тейфейс 13 передается для регистрации в устр-во 14. 6 ил.
блок 2,3; сигнал В1 выезда с первого блока 2,3; сигнал В2 выезда с второго блока 2,3; команда НС Начало суммирования и команда КС Конец суммирования.
Грузоприемные блоки 2 и 3 могут быть использованы из состава серийных весов 1959 ТС-200 В. Дпина блоков 2 и 3 мм, а начало блока 2 сдвинуто относительно начала блока 3 по оси железнодорожного пути I на расстояние мм, что обеспечивает различение регистрируемых объектов (вагонов) с межосевым расстоянием 1800- 1850 мм и нерегистрируемых объектов (локомотивов) с межосевым расстоянием 2100-2200 мм.
Способ осуществляют следующим образом.
В исходном состоянии с помощью АЦП 7 поочередно преобразуются в цифровые коды начальные сигналы тензодат- чиков 5 левого и правого (по фиг.2) грузоприемных блоков 2 и 3, Указанные цифровые коды по программе, записанной в ПЗУ 9,. заносятся процессором 11 в ОЗУ 10 и усредняются по одной из известных программ (например, путем, подсчета среднего значения из 16 подряд измеренных значений кодов).
Результат усреднения нулевых кодов запоминается в ОЗУ 10 и периодически (например, I раз в минуту) обновляется.
При изменении сигналов тензозадатчи- ков 5,нагруженных осями объектов,запомненные нулевые коды вычитаются из результатов обработки по каждой оси, так что для суммирования и определения маесы объектов поступают результаты, равные осевым нагрузкам.
После наезда первым колесом состава, например, на левый (по фиг,2) грузоприемный блок 2 выходной сигнал левого (по фиг.1) тензодатчика 5 возрастает.
Соответственно, на выходе АЦП 7 возрастают и цифровые коды, соответ- ствующие левому грузоприемному блоку 2, Измерив несколько-(например, пять подряд значений кодов, существенно превосходя1цих начальный уровень левого грузоприемного блока 2, процес- сор 11 формирует команды Направление движения - левое, Блок 2 - первый, БЛОК 3 - второй, которые запоминаются в ОЗУ 10.
Одновременно формируется сигнал HI, соответствующий времени t
(фиг,3). Через интерфейс 12 сигнал HI заносится в регистр 15 иаездов.
Одновременно с наездом процессор 11 начинает по одному из известных алгоритмов, записанных в ПЗУ 9, обработку кодов левого грузоприемного блока 2, Результат обработки , запоминается в ОЗУ 10 как масса первого левостороннего колеса подвижного объекта.
Алгоритм обработки обеспечивает фильтрацию цифровых кодов от динамических помех и может быть составлен, например, путем интегрирования за время, кратное целому числу периодов динамической помехи.
На фиг,3 показана диаграмма наг- ружений блоков 2 и 3 при проезде по ним любой (первой или второй) тележки четырехосного объекта. Поскольку межосевое расстояние в тележке b 1800 мм, а расстояние между началами (концами) грузоприемных блоков 2 и 3 L 1950 мм, то в момент t ,. проис- ходит вторичный наезд на грузоприемный блок 2 второй оси тележки, процессором 11 формируется второй подряд сигнал Н1, подаваемый через ии- терфейс 12 на вход регистра 15 иаез- дов, который устанавливается в состояние 2 и через интерфейс 12 передает команду НС процессору 11,
Команда НС запоминается в ОЗУ 10, В соответствии с ней результаты обработки А , А 2 для левого колеса первой тележки объекта и результаты А,п А2пДля правого колеса к моменту вре
0
5 «
Q , Q
5
мени t, просуммированы и запомнены в ОЗУ 10 как масса первой тележки М ,
В момеит времени t с грузоприемного блока 3 выезжает первое колесо объекта, процессором 11 формируется сигнал выезда В2, через интерфейс 12 поступающий иа счетный вход регистра 16 выезда, -устанавливая его в состояние 1, В момент времени t формируется второй подряд сигнал выезда В2, и регистр 16 устанавливается в состояние 2, при этом на шину 8 через интерфейс 12 поступает команда КС.
При проезде второй тележки, т.е, третьей и четвертой осей четьфехос- ; ного вагона, диаграмма наездов и выездов (фиг,3 полностью повторяется так как первая и вторая тележки объекта идентичны.
После проезда второй тележки объекта ее масса суммируется с запомненной ранее в ОЗУ массой М первой тележки, а результат - масса вагоиов М через интерфейс 13 передается для регистрации терминальному устройству 14,
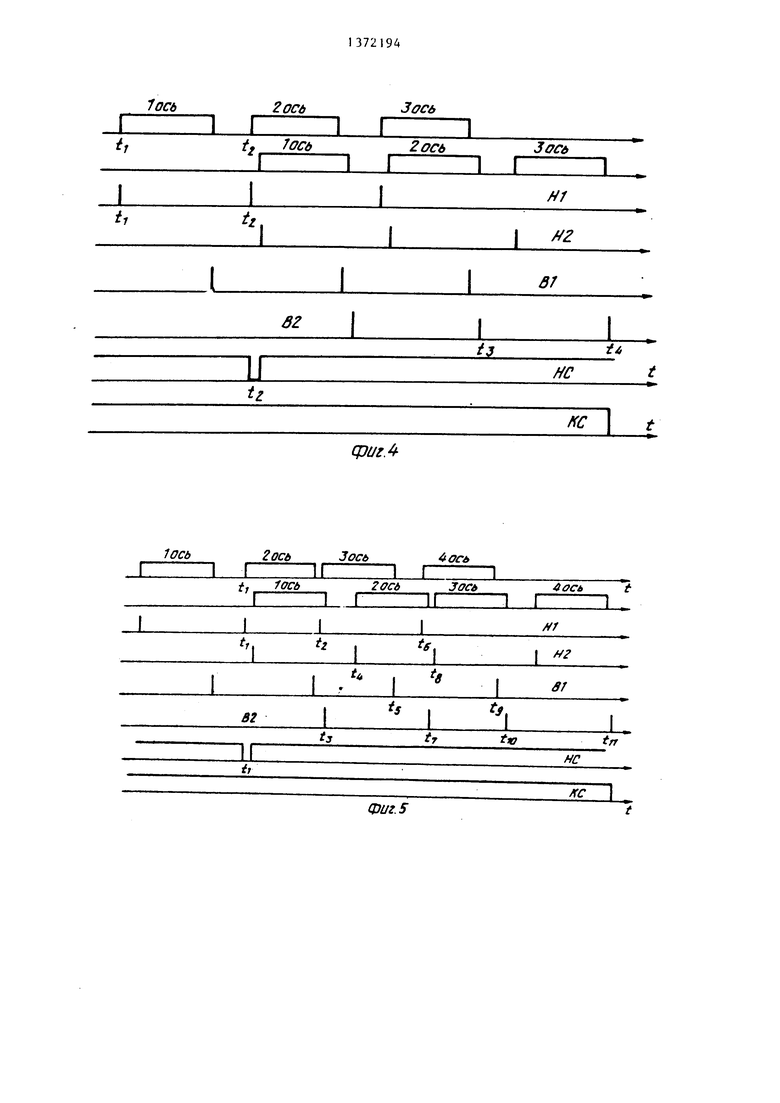
Аналогичиьм образом производится взвешивание шестиосиого вагона, диаграмма наездов и выездов первой тележки которого приведена( .на фиг,4,) Обработка результатов по первому колесу А иачииается в момент времени t , в момеит времени t ,j происходит второй наезд HI и регистром 15 наездов формируется команда НС. В моменты времени t и t формируются сигналы выездов В2 правых колес шестиос- ного объекта с блока 3. и, таким образом, к моменту времени t, (Конец суммирования)в ОЗУ 10 запоминается масса первой тележки шестиосного объекта:
равнг1я массе всех шести колес первой тележки.
Масса гаестиосного вагона М М, соответствеино регистрируется терминальным устройством 14 после проезда второй тележки, диаграмма наездов и выездов четвертой, пятой. и шестой осей которой полностью пов торяется (фиг,4).
На фиг.5 изображена диаграмма наездов и выездов тележки восьмиосного вагона, из которой видно, что команда НС формируется в момент времени t), а наезды HI в моменты t 2 и t за513
носятся в регистр 15 наездов, устанавливая его в состояние |, но погашаются в моменты , и t- сигналами наездов Н2, которые (фиг.1) поступают через интерфейс 12 на гасящий вход регистра 15,
Аналогично выезды В2 в моменты времени t, , и t погашаются сигналами В1 в моменты времени t и tj и только выезды В2, возникающие в моменты времени t и t, устанавливают регистр 16 выездов в состояние 2, т.е. формируют команду КС.
Таким образом, к моменту времени t,, в ОЗУ 10 оказывается просуммированной и запомненной масса первой тележки восьмиосного вагона.
М А,+ А,,-н А,,
ЧП
где А и А. - результаты обработки
I /I П
для левых и правых колес объекта.
Масса восьмиосного вагона М , как и масса других взвешиваемых объектов регистрируется по принципу четности, т.е. после проезда через грузоприем- ные блоки 2 и 3 второй тележки объек- та.
Рассмотрим диаграмму нагружений, чередований наездов и выездов при проезде по грузоприемным блокам 2 и 3 нерегистрируемого объекта, например локомотива (шестиосного).
В этом случае (фиг.6) в момент времени t , на грузоприемный блок 2 также наезжает первое колесо объекта процессор 11 формирует сигнал наезда HI, через интерфейс 12 устанавливая регистр 15 в состояние 1. Начинается обработка результатов для первого левого колеса, заканчивающаяся в момент времени t. выдачей в ОЗУ 10 ре- -I
зультата - массы А первого левого
колеса локомотива.
Однако, в связи с тем, что межосевое расстояние локомотийов Ъ. 2100- 2200 мм, то вслед за первым наездом HI следует наезд правого колеса локомотива на грузоподъемный блок 3 и формированием в момент времени tj сигнала Н2, который погашает регистр 15 наездов.
Q
г
0
5
5
Q
. э
1946
Затем в момент времени t вновь формируется сигнал HI, вновь устанавливающий регистр 15 наездов в состояние 1. Однако в момент времени t сигналом Н2 регистр 15 погашается.
Установка регистра 15 в состояние 1 и погашение его повторяется в моменты времени t н t .
о 11
Таким образом, при проезде локомотива по грузоприемным блокам 2 и 3 сигнал HI дважды подряд не возникает, регистр 15 наездов в состояние 2 не устанавливается и команды НС не формируются. В соответствии с этим по программе, записанной в ПЗУ 9, результаты обработки масс колес локомотива А, А с момента времени t до момента 1;рсмени t последовательно погашаются.
Поскольку сигналы выездов В1 и В2 формируются (фиг.6), последовательно чередуясь, то также исключено и формирование сигнала КС.
Формула изобретения
Способ поколесного взвешивания подвижных объектов, включающий установку на железнодорожном пути двух грузоприемных блоков, сдвинутых относительно друг друга, преобразование выходного сигнала грузоприемных блоков в цифровые коды, фильтрацию цифровых кодов и суммирование результатов обработки, определение направления движения состава, определение наездов осей объектов на грузоприемные блоки, формирование команды Регистрация после проезда каждой четной тележки объекта, отличающий- с я тем, что, с целью повышения точности взвешивания, начало или конец одного из грузоприемных блоков соответственно сдвигают относительно на- чапа или конца другого на расстояние, большее межосевого расстояния регистрируемых объектов, но меньшее межосевого расстояния нерегистрируемых объектов, причем суммирование обработки для каждой тележки объекта начинают при втором подряд наезде тележки объекта на один и тот же грузоприемный блок, а заканчивают при втором подряд выезде.
/ 7300
1ось
2ось
Фиг. г
Фиг.З
1ось2осьЗосб
1осьZocbЗось ось
сриг.
фиг. 5
| Приборы и системы управления, 1984, 3, с„ 45 | |||
| Способ управления процессом дегазации жидкой стали в струе | 1984 |
|
SU1154344A1 |
| Г, 01 G 19/04, 05 | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
