(Л
На Ы
ftnopuvHoee npiifon
Изобретение относится к автоматизации шаровых мельниц и может быть использован в цементной, энергетической и других отраслях промьшшенности.
Цель изобретения - повышение точности контроля внутримельничного заполнения за счет прямого и непрерывного нахождения шаровой пяты компенсационным способом.
На фиг.1 показана структурная блок схема и конструкция экстремального анализатор внутримельничного заполнения мельницы; на фиг,2 - сечение А-А на фиг.1; на фиг 3 - вид Б на фиг.2.
Экстремальный анализатор внутри- мельничного заполнения мельницы со
Известно, что зона максимального звучания, расположенная по всей длине шаровой мельницы, смещается вверх или вниз .по обечайке мельницы в завифакторам относится: скорость вращения мельницы, тип и состояние в данный момент бронефутеровки, количество
держит обечайку 1 и бронефутеровку 2.
Мельница заполнена мелющими шарами. 20 симости от целого ряда внешних и На расстоянии 50-JOO мм от мельницы внутренних факторов. К внутренним установлен корпус 3 анализатора. Корпус обращен по отношению обечайки мельницы концентрическими направляющими 4, ограниченными дугой, в кото- 25 и сортамент. мелюи;их тел, аспирадион- рых расположена подвижная каретка 5, ный режим и т.д. К внешним факторам .- с закрепленными на ней двумя датчика- относится: количество и физико-пмеханн ми 6 и 7 шума. Датчики на плате уста-. ческие характеристики материала. Все
I новлены в вертикальной плоскости эти факторы, которые в совокупности один над другим с межцентровым рас- 30 определяют понятие внутримельничное
I стоянием 60-80 мм. Для уменьшения тре- заполнение, воздействуют на траекто- ния между кареткой 5 и направляющими рию падения шаров на пяту, смещая 4 в каретке применены фторпластовые ее вверх или вниз по дуге на обечай- подшипники 8 скольжения. На наружной ке мельницы и соответственно изменяя
I поверхности направляющих 4 по всей 35 ° максимального звучания. Дуга
длине установлена прокладка 9 из лако ткани, препятствующая попаданию пыли вовнутрь прибора и на датчики 6 и 7,
; НО свободно пропускающая шум мельниц
I цы. Конуструкция каретки 5, перемещаю-40 слежения за экстремумом акустическо щейся в пазах направляющих 4 показана f в плоскости поперечного сечена фиг.2 и 3, Кинематический механизм ния мельницы, определяемого дву- перемещения подвижной каретки 5 с дат- датчиками 6 и 7 шума. Эти датчи- чиками 6 и 7 в направляющих 4 состо- ки расположены один над другим в ит из двух опорных блоков 10 и тяго- 45 плоскости сечения так, что вне за- вого блока 1, установленного ка оси висимости от их расположения относительно экстремума шума один из датчиков имеет на выходе сигнал больше чем- другой, и только тогда, когда
упорами на угол менее 360°, охваты- 50 подвижная каретка 5 с помощью кине- ваюищй всю дугу. Для визуального на- матического механизма установится блюдения за работой прибора в процес- строго по оси экстремума, сигналы на се наладки на поверхности блока 11 выходе датчиков будут равны между нанесена икала, проградуированная в собой. Малейшее смещение экстремума градусах дуги относительно неподвиж- 55 Р и вниз приведет к разности ной стрелки. Шкала отделена герметич- напряжений на выходе микрофона, по- ным . стеклянным окном на корпусе 3 даваемых на компаратор 13. На выходе прибора от запыленной атмосферы. Вы- компаратора 13 выделяется разность ходные сигналы с датчиков 6 и 7 навег- текущих значений с выходов миограничивает предельное значение зоны падения шаров. В основу конструкции экстремального анализатора заложен компенсационный принцип поиска и
реверсивного электродвигателя 12 постоянного тока. Вращение тягового блока относительно оси ограничено
дены на компаратор 13 и далее на генератор 14, усилитель 15 и клеммы реверсивного электродвигатегся 12, С осью тягового блока 11 механически соединен датчик 16 обратной связи (например, потенциометрической, индукционной и т.д.). У шфицированный сигнал с датчика 16, пропорциональный текущему значению измеряемого параметра, подается на регистрирующий прибор.
Экстремальньй анализатор вкутриг- и мельничного заполнения работает сле- дуюишм образом.
Известно, что зона максимального звучания, расположенная по всей длине шаровой мельницы, смещается вверх или вниз .по обечайке мельницы в зави
факторам относится: скорость вращения мельницы, тип и состояние в данный момент бронефутеровки, количество
симости от целого ряда внешних и внутренних факторов. К внутренним и сортамент. мелюи;их тел, аспирадион- ный режим и т.д. К внешним факторам .- относится: количество и физико-пмеханн ческие характеристики материала. Все
° максимального звучания. Дуга
ограничивает предельное значение зоны падения шаров. В основу конструкции экстремального анализатора заложен компенсационный принцип поиска и
крофонов. Сигнал с компаратора 13 подается на управляемый генератор 14 прямоугольных импульсов. Генератор 14 преобразует уровень сигнала (его полярность и амплитуду) на входе в различную скважиннрсть напряжений на выходе. Этот сигнал усиливается в дифференциальном усилителе 15 и управляет работой реверсивного двигателя 12. Схема управления двигателем собрана так, чтобы кинематически механизм перемещал плату с датчиками в направлении компенсации разности шумов. Например, экстремум шума, характеризующий место нахождения шаровой пяты, расположен вьш1е каретки 5 с датчиками, тогда верхний датчик будет иметь на выходе большее напря- . жение, чем нижний и реверсивный двигатель будет перемещать каретку с датчиками вверх до полной компенсации шума, и наоборот.
Полезный сигнал внутримельничного
жения шаровой пяты мельницы в пространстве. Так, установленный неподвижно на подставке относительно мель- f. датчик шума необходимо через каждые 3-4 сут перестраивать (передвигать по высоте) путем интуитивного нахождения пяты мельницы.
Экстремальный анализатор внутрй- 10 мельничного заполнения позволяет с высокой точность и надежностью непосредственно осуществлять поиск и отслеживание местонахождения шаровой пяты, которая полностью характеризует 15 процесс измельчения в любых шаровых мельницах.
Формула изобретения
20 Экстремальньй анализатор внутри- мельничного заполнения, содержалщй два датчика шума и усилитель, отличающийся тем, что, с
целью повьш1ения точности контроля заполнения, регистрируемый экстремаль- 25 внутримельничного заполнения за счет ным анализатором, абсолютно инвариан- прямого и непрерывного нахоладення ша. тен к сигналу помех соседних мель- ровой пяты компенсационньм способом, ниц или других механизмов, так как он снабжен компаратором, генератором;
прямоугольных импульсов, реверсивным
любой по интенсивности и периодичности сигнал будет одновременно и одина- зо двигателем, датчиком обратной связи
К0ВО воздействовать на оба рядом расположенных датчика, не изменяя при этом соотношения полезных сигналов. Экстремальный анализатор реагирует не на изменение общей интенсивности и его характер, а на разность шумов по простейшей логике: больше - меньше. Другим принципиальным достоинством экстремального анализатор по сравнению с любыми датчиками шума либо вибрации является инвариантность во времени контролируемого параметра от дрейфа статической характеристики шума, обусловленной изменением поло35
40
с регистрирующим прибором, причем датчики шума выполнены с возможностью перемещения относительно обечайки мельницы от тягового блока,установленного на оси реверсивного электродвигателя, а выходы датчиков шума соединены с соответствующими входами ком- паратора, выход которого через после довательно соединенные усилитель и генератор прямоугольных импульсов подключен к реверсивному двигателю, кинё- матичечки соединенного с датчиком обратной связи с регистрирующим прибором.
. и
14562264
жения шаровой пяты мельницы в странстве. Так, установленный вижно на подставке относительно мель- датчик шума необходимо через каждые 3-4 сут перестраивать (передвигать по высоте) путем интуитивного нахождения пяты мельницы.
Экстремальный анализатор внутрй- мельничного заполнения позволяет с высокой точность и надежностью непосредственно осуществлять поиск и отслеживание местонахождения шаровой пяты, которая полностью характеризует процесс измельчения в любых шаровых мельницах.
Формула изобретения
Экстремальньй анализатор внутри- мельничного заполнения, содержалщй два датчика шума и усилитель, отличающийся тем, что, с
5
0
с регистрирующим прибором, причем датчики шума выполнены с возможностью перемещения относительно обечайки мельницы от тягового блока,установленного на оси реверсивного электродвигателя, а выходы датчиков шума соединены с соответствующими входами ком- паратора, выход которого через после довательно соединенные усилитель и генератор прямоугольных импульсов подключен к реверсивному двигателю, кинё- матичечки соединенного с датчиком обратной связи с регистрирующим прибором.
и.г.1
8ад Б
Фо-г.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный анализатор внутримельничного заполнения | 1990 |
|
SU1755922A1 |
| Способ контроля параметров движения внутримельничной загрузки барабанной мельницы и устройство для его осуществления | 1986 |
|
SU1333412A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ВНУТРИМЕЛЬНИЧНОГО ЗАПОЛНЕНИЯ ШАРОВЫХ МЕЛЬНИЦ | 1996 |
|
RU2096088C1 |
| Способ оптимального управления работой мельницы самоизмельчения | 1977 |
|
SU740281A1 |
| Способ автоматического управления процессом мокрого измельчения | 1982 |
|
SU1088793A1 |
| Способ регулирования максимальной производительности шаровой мельницы | 1976 |
|
SU654290A1 |
| Способ автоматического контроля и регулирования заполнения барабанной мельницы измельчительным и измельчаемым материалами | 1976 |
|
SU659183A1 |
| Способ автоматического регулирования загрузки шаровой барабанной мельницы | 1985 |
|
SU1398908A1 |
| Устройство для определения догрузки измельчающих тел | 1981 |
|
SU995881A1 |
| Способ автоматического определения режима перегрузки шаровой мельницы | 1978 |
|
SU772588A1 |
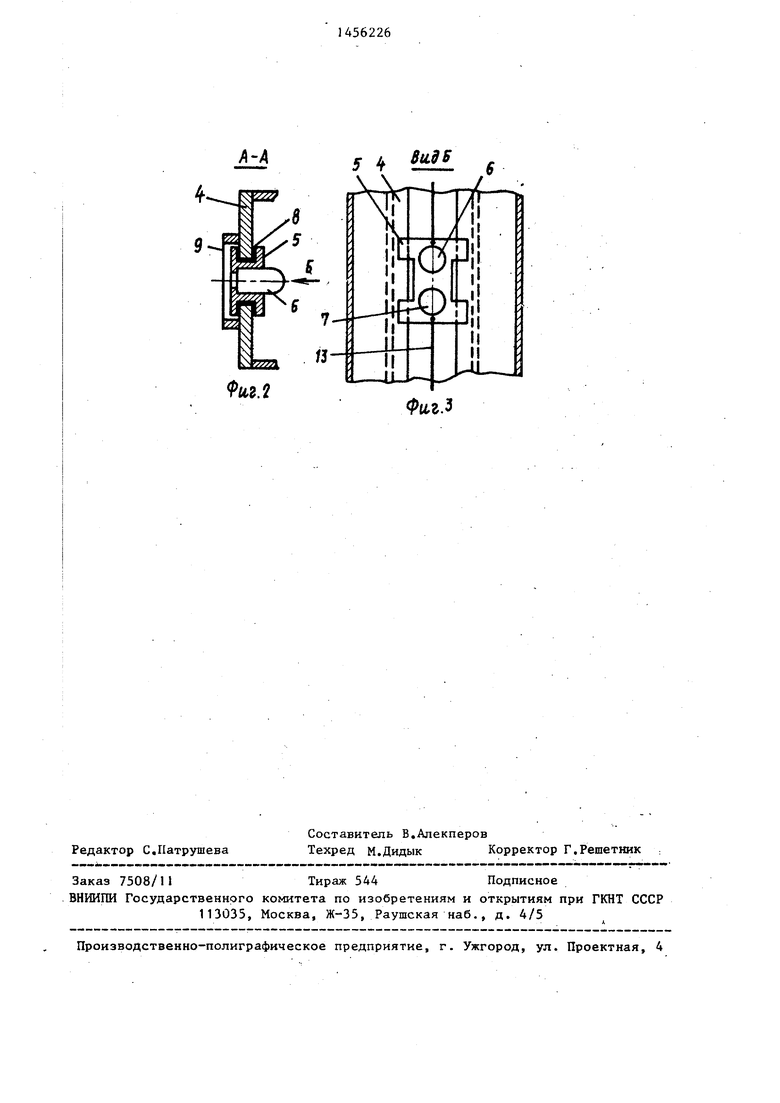
Изобретение относится к автоматизации шаровых мельниц и может найти применение в цементной, энергетической и других отраслях промышленности, позволяет повысить точность контроля внутримельничного заполнения за счет прямого и непрерывного нахождения шаровой пяты компенсационным способом. Уст-во содержит подвижную каретку с закрепленными на ней двумя датчиками 6 и 7 шума, кинематический механизм перемещения каретки в виде двух опорных блоков 10 и тягового ,блока 11, установленного на оси ре- . версивного электродвигателя 12, компаратор 13, генератор 14, усилитель 15 и датчик 16 обратной связи с регистрирующим прибором. 3 ил
| 0 |
|
SU189917A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для регулирования запол-НЕНия МЕльНицы | 1979 |
|
SU841687A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
