Изобретение относится к области программной обработки пространственных сцен, предназначено для решения задач размещения объектов в пространстве, задач распознавания трехмерных образов, задач трехмерной машинной графики,а также задач, в которых обработка информации может быть сведена к последовательному выполнению над трехмерными объектами теоретико-множественных операций, геометрических преобразований типа , параллельного переноса и поворота в пространстве, процедур вычисления объема..
Целью изобретения является повышение быстродействия устройства.
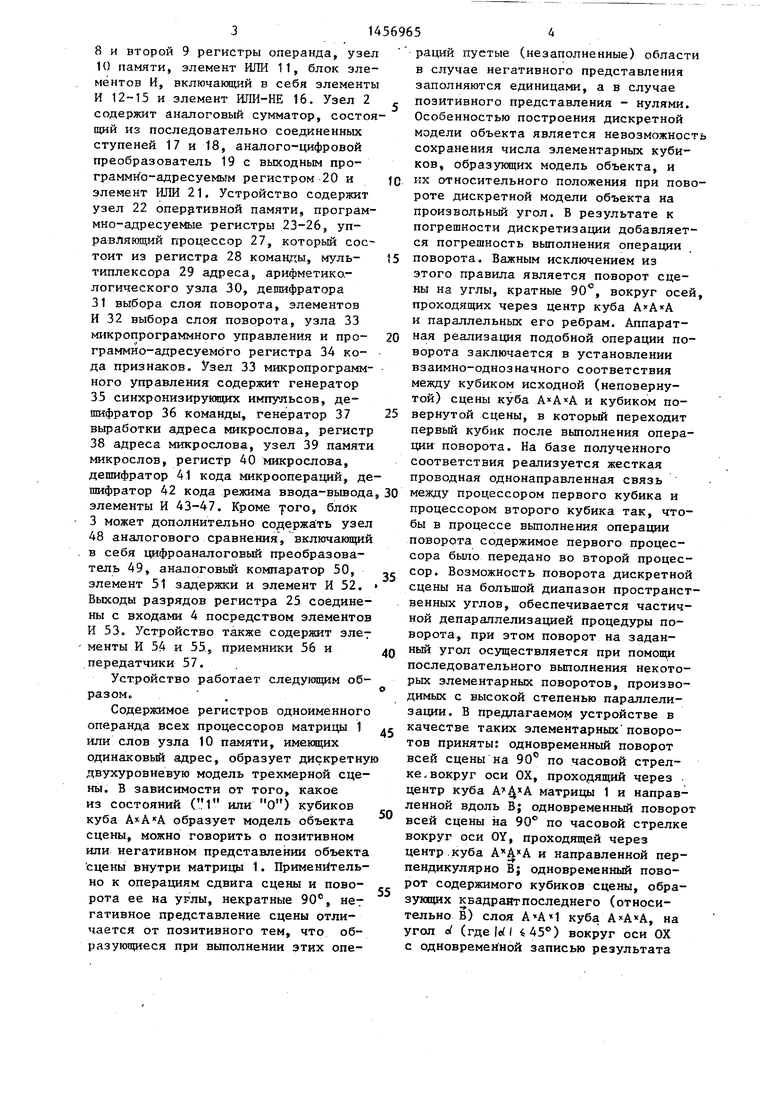
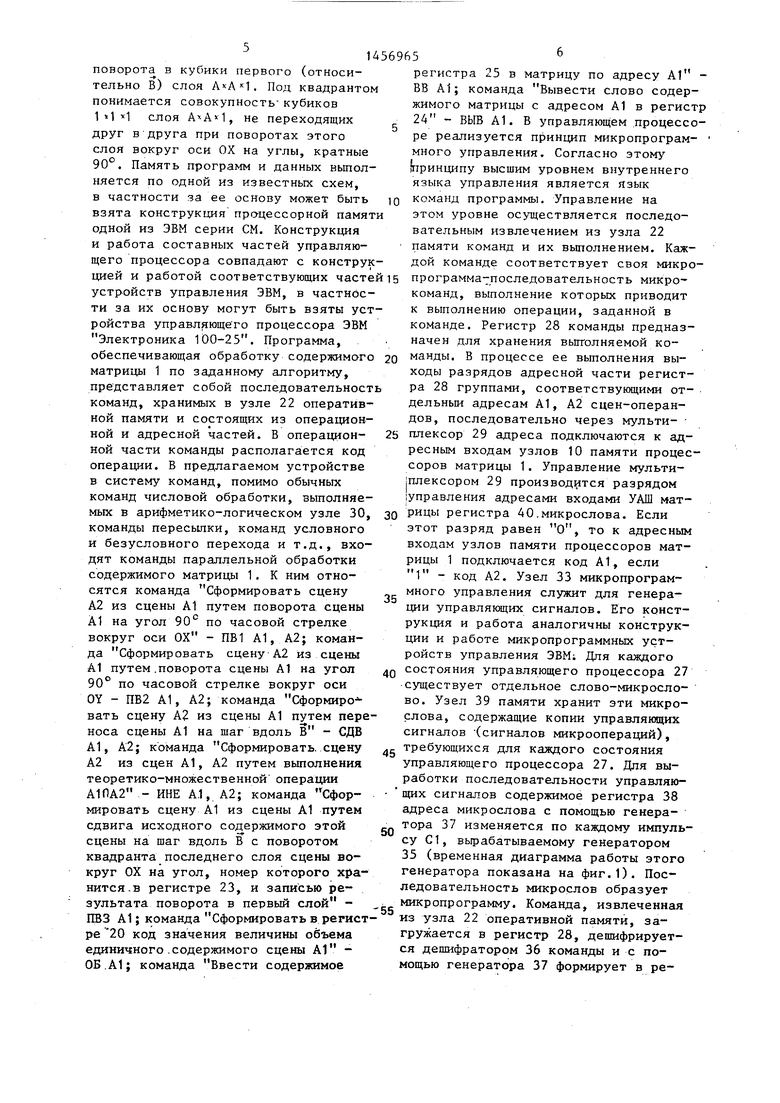
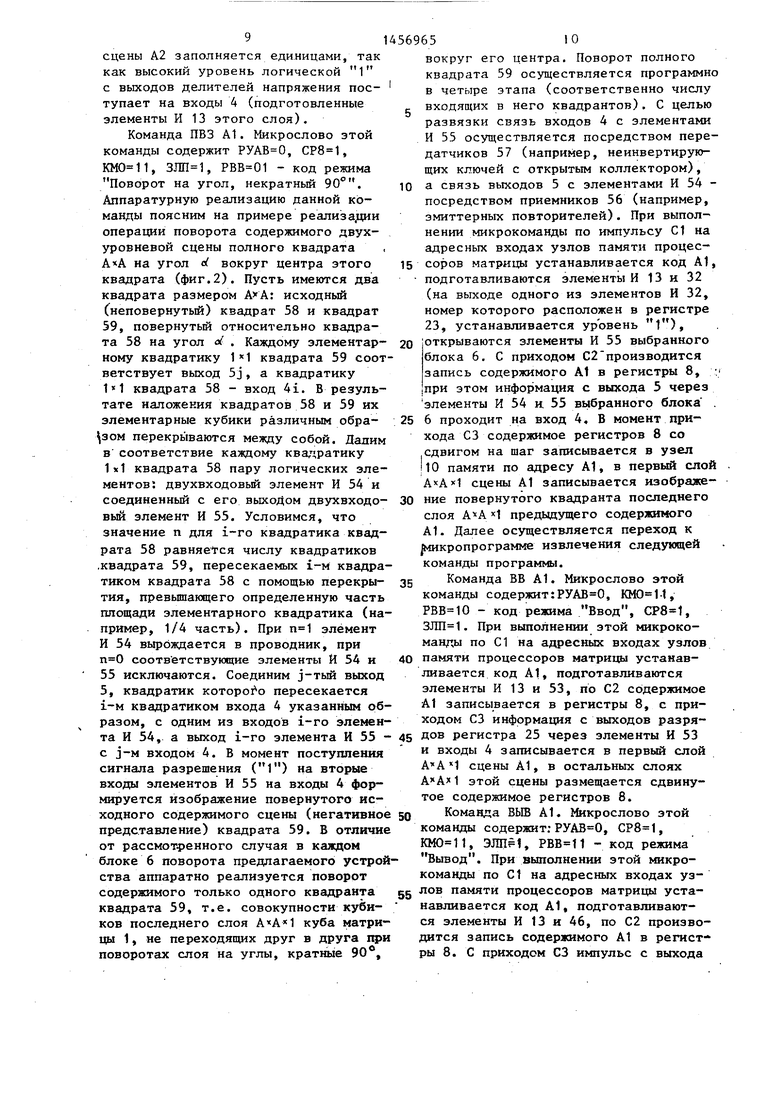
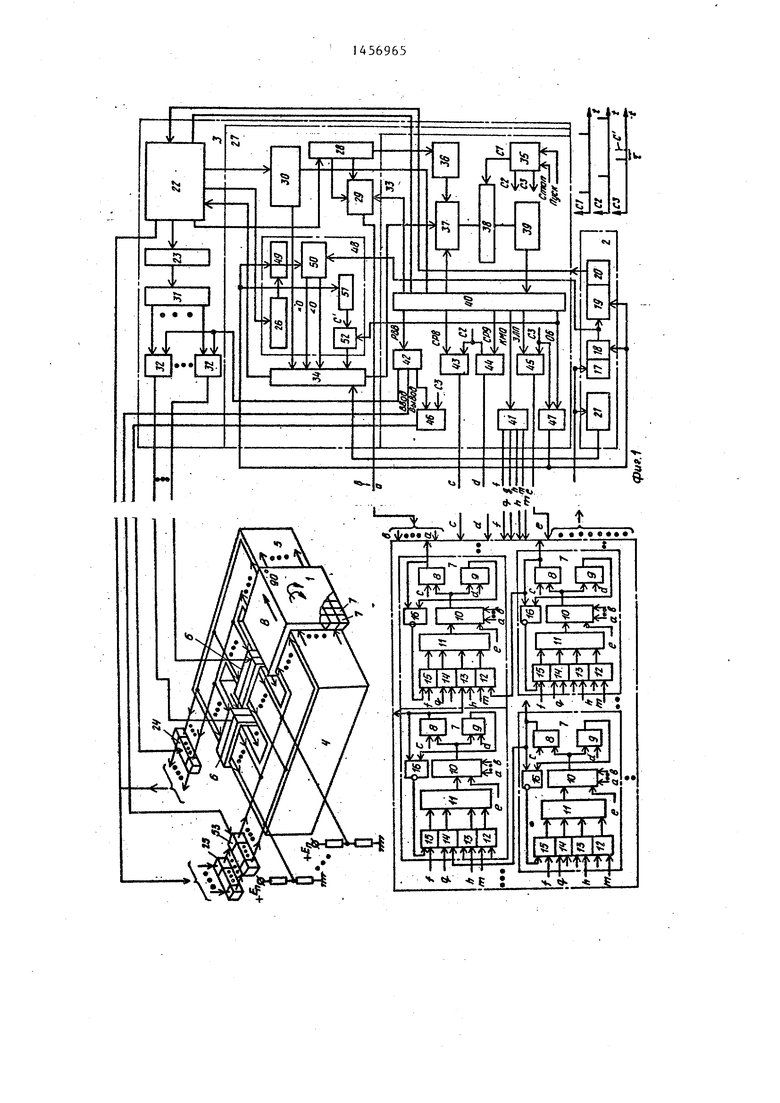
На фиг.1 представлен пример реализации устройства для параллельной ; обработки трехмерных сцен; .нафиг.2- принцип, согласно которому аппарат- до реализуется операция послойного . поворота содержимого последнего слоя «AXI матрицы вокруг центра этого слоя на угол, некратный 90 .
Устройство для параллельной обработки трехмерных сцен содержит трех- 1мерную матрицу 1 процессоров, узел 2 определения объема, входящий в состав блока 3 управления, первый и последний слои матрицы процессоров имеют соответственно входы 4 и выходы 5, блоки 6 поворота . Матрица 1 состоит из А процессоров 7. Каждый процессор 7 включает в себя первый
:д
8 и второй 9 регистры операнда, узел 10 памяти, элемент ИЛИ 11, блок элементов И, включаклций в себя элементы И 12-15 и элемент ИЛИ-НЕ 16. Узел 2 содержит аналоговый сумматор, состоящий из последовательно соединенных ступеней 17 и 18, аналого-цифровой преобразователь 19 с выходным программно-адресуемым регистром 20 и элемент ИЛИ 21. Устройство содержит узел 22 оперативной памяти, программно-адресуемые регистры 23-26, управляющий процессор 27, который состоит из регистра 28 команды, мультиплексора 29 адреса, арифметико- логического узла 30, дешифратора 31 выбора слоя поворота, элементов И 32 выбора слоя поворота, узла 33 микропрограммного управления и программно-адресуемого регистра 34 кода признаков. Узел 33 микропрограммного управления содержит генератор 35 синхронизирующих импульсов, дешифратор 36 команды, генератор 37 выработки адреса микрослова, регистр 38 адреса микрослова, узел 39 памяти микрослов, регистр 40 микрослова, дешифратор 41 кода микроопераций, дераций пустые (незаполненные) облас в случае негативного представления заполняются единицами, а в случае позитивного представления - нулями Особенностью построения дискретной модели объекта является невозможно сохранения числа элементарных куби ков, образующих модель объекта, и 1C их относительного положения при по роте дискретной модели объекта на произвольный угол. В результате к погрешности дискретизации добавляе ся погрешность вьтолнения операции 15 поворота. Важным исключением из
этого правила является поворот сце ны на углы, кратные 90, вокруг осе проходящих через центр куба и параллельных его ребрам. Аппарат- 20 ная реализация подобной операции по ворота заключается в установлении взаимно-однозначного соответствия между кубиком исходной (неповернутой) сцены куба и кубиком по- 25 вернутой сцены, в который переходит первый кубик после выполнения опера ции поворота. На базе полученного соответствия реализуется жесткая проводная однонаправленная связь
шифратор 42 кода режима ввода-вьшода, 30 между процессором первого кубика и
элементы И 43-47. Кроме уого, блок 3 может дополнительно содержать узел 48 аналогового сравнения, включающий в себя цифроаналоговый преобразователь 49, аналоговьй компаратор 50, элемент 51 задержки и элемент И 52. Выходы разрядов регистра 25 соединены с входами 4 посредством элементов И 53. Устройство также содержит эпе.- менты И 54 и 55, приемники 56 и передатчики 57.
Устройство работает следующим образом. ,
Содержимое регистров одноименного операнда всех процессоров матрицы 1 или слов узла 10 памяти, имекяцих одинаковьй адрес, образует дискретную двухуровневую модель трехмерной сцены. В зависимости от того, какое из состояний (1 или О) кубиков куба образует модель объекта сцены, можно говорить о позитивном или негативном представлении объекта сцены внутри матрицы 1. Применительно к операциям сдвига сцены и поворота ее на урлы, некратные 90, нет гативное представление сцены отличается от позитивного тем, что образующиеся при вьтолнении этих опе35
40
45
50
55
процессором второго кубика так, что бы в процессе выполнения операции поворота содержимое первого процессора было передано во второй процес сор. Возможность поворота дискретно сцены на большой диапазон пространс венных углов, обеспечивается частич ной депараллелизацией процедуры поворота, при этом поворот на заданный угол осуществляется при помощи последовательного вьтолнения некото рых элементарных поворотов, произво димых с высокой степенью параллели- зации. В предлагаемом устройстве в качестве таких элементарных поворотов приняты: одновременный поворот всей сцены на 90 по часовой стрелке, вокруг оси ОХ, проходящий через центр куба матрицы 1 и направленной вдоль В; одновременный поворо всей сцены на 90 по часовой стрелке вокруг оси OY, проходящей через центр.куба и направленной перпендикулярно В; одновременный поворот содержимого кубиков сцены, образующих квадрантпоследнего (относительно В) слоя куба А А «А, на угол 0 (гдеЫ 445) вокруг оси ОХ с одновременной записью результата
4569654
раций пустые (незаполненные) области в случае негативного представления заполняются единицами, а в случае позитивного представления - нулями. Особенностью построения дискретной модели объекта является невозможность сохранения числа элементарных кубиков, образующих модель объекта, и 1C их относительного положения при повороте дискретной модели объекта на произвольный угол. В результате к погрешности дискретизации добавляется погрешность вьтолнения операции 15 поворота. Важным исключением из
этого правила является поворот сцены на углы, кратные 90, вокруг осей, проходящих через центр куба и параллельных его ребрам. Аппарат- 20 ная реализация подобной операции поворота заключается в установлении взаимно-однозначного соответствия между кубиком исходной (неповернутой) сцены куба и кубиком по- 25 вернутой сцены, в который переходит первый кубик после выполнения операции поворота. На базе полученного соответствия реализуется жесткая проводная однонаправленная связь
, 30 между процессором первого кубика и
5
0
5
0
5
процессором второго кубика так, чтобы в процессе выполнения операции поворота содержимое первого процессора было передано во второй процессор. Возможность поворота дискретной сцены на большой диапазон пространственных углов, обеспечивается частичной депараллелизацией процедуры поворота, при этом поворот на заданный угол осуществляется при помощи последовательного вьтолнения некоторых элементарных поворотов, производимых с высокой степенью параллели- зации. В предлагаемом устройстве в качестве таких элементарных поворотов приняты: одновременный поворот всей сцены на 90 по часовой стрелке, вокруг оси ОХ, проходящий через центр куба матрицы 1 и направленной вдоль В; одновременный поворот всей сцены на 90 по часовой стрелке вокруг оси OY, проходящей через центр.куба и направленной перпендикулярно В; одновременный поворот содержимого кубиков сцены, образующих квадрантпоследнего (относительно В) слоя куба А А «А, на угол 0 (гдеЫ 445) вокруг оси ОХ с одновременной записью результата
10
поворота в кубики первого (относительно В) слоя . Под квадрантом понимается совокупность-кубиков 1 Ч к1 слоя , не переходящих друг в друга при поворотах этого слоя вокруг оси ОХ на углы, кратные 90. Память программ и данных выполняется по одной из известных схем, в частности за ее основу может быть взята конструкция процессорной памяти одной из ЭВМ серии СМ. Конструкция и работа составных частей управляющего процессора совпадают с конструкцией и работой соответствуюощх частей IB устройств управления ЭВМ, в частности за их основу могут быть взяты устройства управляюще го процессора ЭВМ Электроника 100-25. Программа, обеспечивающая обработку содержимого 20 матрицы 1 по заданному алгоритму, представляет собой последовательность команд, хранимых в узле 22 оперативной памяти и состоящих из операционной и адресной частей. В операционной части команды располагается код операции. В предлагаемом устройстве в систему команд, помимо обычных команд числовой обработки, выполняемых в арифметико-логическом узле 30, команды пересылки, команд условного и безусловного перехода и т.д., входят команды параллельной обработки содержимого матрицы 1. К ним относятся команда Сформировать сцену А2 из сцены А1 путем поворота сцены А1 на угол 90 по часовой стрелке вокруг оси ОХ - ПВ1 А1, А2; команда сформировать сцену А2 Из сцены А1 путем .поворота сцены А1 на угол 90 по часовой стрелке вокруг оси OY - ПВ2 А1, А2; команда Сформиро вать сцену А2 из сцены А1 путем переноса сцены А1 на шаг вдоль В - СДВ А1, А2; команда Сформировать, сцену А2 из сцен А1, А2 путем выполнения теоретико-множественной операции
регистра 25 в матрицу по адресу А1 ВВ А1; команда Вывести слово соде жимого матрицы с адресом А1 в реги 24 - ВЫВ А1. В управляющем процесс ре реализуется принцип микропрограм много управления. Согласно принципу высшим уровнем внутреннего языка управления является язык команд программы. Управление на этом уровне осуществляется последовательным извлечением из узла 22 памяти команд и их выполнением. Каж дой команде соответствует своя микр программа-последовательность микрокоманд, выполнение которых приводит к выполнению операции, заданной в команде. Регистр 28 команды предназ начен для хранения вытголняемой команды. В процессе ее выполнения выходы разрядов адресной части регист ра 28 группами, соответствующими от дельный адресам А1, А2 сцен-операндов, последовательно через мульти- 25 плексор 29 адреса подключаются к ад ресным входам узлов 10 памяти проце соров матрицы 1. Управление мульти- |Плексором 29 производится разрядом
35
40
А1ПА2 - ИНЕ А.1, А2; команда Сформировать сцену А1 из сцены А1 путем сдвига исходного содержимого этой сцены на шаг вдоль В с поворотом квадранта последнего слоя сцены вокруг ОХ на угол, номер которого хранится, в регистре 23, и записью результата поворота в первый слой |управления адресами входами УАШ мат 30 рицы регистра 40.микрослова. Если этот разряд равен О, то к адресны входам узлов памяти процессоров мат рицы 1 подключается код А1, если 1 - код А2. Узел 33 микропрограммного управления служит для генерации управляющих сигналов. Его конструкция и работа аналогичны конструкции и работе микропрограммных устройств управления ЭВМ; Для каждого состояния управляющего процессора 27 существует отдельное слово-микрослово. Узел 39 памяти хранит эти микрослова, содержащие копии управляющих сигналов -(сигналов микроопераций), требующихся для каждого состояния управляющего процессора 27. Для выработки последовательности управляющих сигналов содержимое регистра 38 адреса микрослова с помощью генератора 37 изменяется по каждому импуль су С1, вырабатываемому генератором 35 (временная диаграмма работы этого генератора показана на фиг.1). Последовательность микрослов образует 55 Команда, извлеченная
45
50
ЛЕЗ А1; команда Сформировать врегист-из узла 22 оперативной памяти, заре 20 код значения величины объемагружается в регистр 28, дещифрирует- единичного .содержимого сцены А1 -ся дешифратором 36 команды и с по- ОБ.А1; команда Ввести содержимоемощью генератора 37 формирует в ре1456965
10
IB 20
регистра 25 в матрицу по адресу А1 - ВВ А1; команда Вывести слово содержимого матрицы с адресом А1 в регистр 24 - ВЫВ А1. В управляющем процессоре реализуется принцип микропрограм- много управления. Согласно принципу высшим уровнем внутреннего языка управления является язык команд программы. Управление на этом уровне осуществляется последовательным извлечением из узла 22 памяти команд и их выполнением. Каждой команде соответствует своя микропрограмма-последовательность микрокоманд, выполнение которых приводит к выполнению операции, заданной в команде. Регистр 28 команды предназначен для хранения вытголняемой команды. В процессе ее выполнения выходы разрядов адресной части регистра 28 группами, соответствующими от- дельный адресам А1, А2 сцен-операндов, последовательно через мульти- 25 плексор 29 адреса подключаются к адресным входам узлов 10 памяти процессоров матрицы 1. Управление мульти- |Плексором 29 производится разрядом
35
40
|управления адресами входами УАШ мат- 30 рицы регистра 40.микрослова. Если этот разряд равен О, то к адресным входам узлов памяти процессоров матрицы 1 подключается код А1, если 1 - код А2. Узел 33 микропрограммного управления служит для генерации управляющих сигналов. Его конструкция и работа аналогичны конструкции и работе микропрограммных устройств управления ЭВМ; Для каждого состояния управляющего процессора 27 существует отдельное слово-микрослово. Узел 39 памяти хранит эти микрослова, содержащие копии управляющих сигналов -(сигналов микроопераций), требующихся для каждого состояния управляющего процессора 27. Для выработки последовательности управляющих сигналов содержимое регистра 38 адреса микрослова с помощью генератора 37 изменяется по каждому импульсу С1, вырабатываемому генератором 35 (временная диаграмма работы этого генератора показана на фиг.1). Последовательность микрослов образует 5 Команда, извлеченная
5
0
из узла 22 оперативной памяти, загружается в регистр 28, дещифрирует- ся дешифратором 36 команды и с по- мощью генератора 37 формирует в регистре 38 адрес начального микрослова микропрограммы. По этому адресу (микроадресу) из узла 39 памяти извлекается управляющее микрослово, которое затем загружается в регистр 40 микрослова. Это микрослово содержит управляющее поле, разряды кото- рого используются для генерации сигналов -требуемых i-OTKpoonepa H, а также поле следующего микроадреса и поле кода 1.дакроветвления. Поле следующего микроадреса обеспечивает базовьй микроадрес,, которьй указы- эает на следующее микрослово при ее- тественной последовательности выборки микрослов. Однако этот базовьй микроадрес может быть модифицирован с целью микроветвления. Модификация микроадреса происходит до его за- грузки в регистр-38, поэтому она выполняется по отношению к микроадресу не следующего микрослова, а к микроадресу микрослова, следукяцего за ним Поле кода микроветвления определяет, какие разряды регистра 34 кода признаков необходимо проверить и использовать при модификации микроадреса. Код признаков формируется в регистре 34, часть разрядов которого содержит трехразрядный код. Один разряд этого кода устанавливается в 1, если результат предьздущей микрокоманды равен нулю, второй разряд устанавливается в 1, если результат предьщуще операции меньше нуля, третий разряд устанавливается в 1, если объем единичного, содержимого первых регистров операнда матрицы не равен нулю (вькод этого разряда совпадает с выходом ,А - входоврго элемента ИЛИ 21);Код признаков формируется в результате вьЕтолнения логических и арифметических операций, производшфп в узле 20, а.также в результате вы- полнения команды сравнения объема объекта с заданным значением. Часть управляющего поля микрослова образует поле управления матрицей t, в это Коле входят разряд управления адресными входами матрицы (РУАВ), два разряда кода микроопераций (КМО) разряд разрешения заггаси в узел 10 памяти (ЭЛЛ), разряд управления считыванием содеряимого узла памяти в регистры 8(СР8), разряд управления считыванием содержимого узла памяти в регистры 9(СР9) два разряда кода режима.вводатвывода (РВВ), разряд
запуска операции определения объема (ОБ).
Рассмотрим команды обработки содежимого матрицы. При этом будем считать, что объекты сцен-операндов представлены в негативном виде. V/ Команда ИНЕ А1, А2. Начальное микрослово этой команды содержит следующую информацию: ,. По С1 на адресных входах узлов памят процессоров матрицы устанавливается код А1. С приходом С2 на подготов- ленньй элемент И 43 сигнал с выхода узла .10 памяти записывается в регист 8. С приходом следующего импульса С1 извлекается второе микрослово, содержащее , , , код микрооперадаи 01Л02, . Благодаря подготовленному элементу И 44 импульс С2 записывает сигнал с выхо- 1да узла 10 памяти в регистр 9, а с приходом СЗ сигнал с выхода элемента ИЛИ-НЕ 16 через подготовленньй элемент И 15 записывается в узел 10 памяти по адресу А2. Далее осуществляется переход к микропрограмме извлечения следукщей команды программы из узла 22 памяти в регистр 28.
Команда ПВ1 А1, А2. Шкропрограм- ма этой команды включает микрослова (, , код микрооперации Поворот на 90 вокруг ОХ, ) и ( ). В результате выполнения первого микрослова (, ) содержимое А1 располагается в регистрах 8. По С1 в регистр микрослова вызывается второе микрослово микропрограммы. С приходом СЗ производится запись содержимого регистра 8 через подготовленньй элемент И 14 в узел 10 памяти соответствующего процессора (передача содержимого регистра 8 осуществляется по линии связи, относящейся к первой группе ортогонально-кольцевых связей). Микропрограмма команды ПВ2 А1, А2 и микропрограмма команды СДВ А1, А2 . отличаются от микропрограммы ПВ1 АГ, А2 тем, что во втором микрослове в случае ПВ2 А1, А2 (код микрооперации Поворот на 90 вокруг OY) а в случае СДВ А1, А2 ЩO- (код микрооперации Сдвиг на шаг вдоль в). Функцию управляющего ключа при вьтолнении ПВ2 А1, А2 выполняет элемент И 12, при вьлолнении СДВ А1, А2 - элемент И 13. В процессе выполнения СДВ А1 , А2 первый слой
сцены А2 заполняется единицами, так как высокий уровень логической 1 с выходов делителей напряжения поступает на входы 4 (подготовленные элементы И 13 этого слоя).
Команда ПВЗ А1. Микрослово этой команды содержит , , , , - код режима Поворот на угол, некратный 90°. Аппаратурную реализацию данной команды поясним на примере реализа;щи операции поворота содержимого двухуровневой сцены полного квадрата А«А на угол at вокруг центра этого квадрата (фиг.2). Пусть имеются два квадрата размером исходный (неповернутый) квадрат 58 и квадрат 59, повернутьш относительно квадравокруг его центра. Поворот полного квадрата 59 осуществляется программно в четыре этапа (соответственно числу входящих в него квадрантов). С целью развязки связь входов 4 с элементами И 55 осуществляется посредством передатчиков 57 (например, неинвертирующих ключей с открытым коллектором),
10 а связь выходов 5 с элементами И 54 - посредством приемников 56 (например, эмиттерных повторителей). При выполнении микрокоманды по импульсу С1 на адресных входах узлов памяти процес15 соров матрицы устанавливается код А1, подготавливаются элементы И 13 и 32 (на выходе одного из элементов И 32, номер которого расположен в регистре
23, устанавливается уровень 1), та 58 на угол of . Каждому элементар- 20 рткрываются элементы И 55 выбранного ному квадратику квадрата 59 соот- блока 6. С приходом С2 производится ветствует выход 5j, а квадратику запись содержимого А1 в регистры 8, квадрата 58 - вход 41. В резуль- при этом информация с выхода 5 через тате наложения квадратов 58 и 59 их элементы И 54 и 55 выбранного блока .
25 6 проходит на вход 4, В момент прихода СЗ содержимое регистров 8 со сдвигом на шаг записывается в узел ю памяти по адресу А1, в первый слой сцены А1 записывается изображе- соединенный с его выходом двухвходо- 30 ние повернутого квадранта последнего вый элемент И 55. Условимся, что слоя 1 предыдущего содержимого значение п для i-ro квадратика квадрата 58 равняется числу квадратиков .квадрата 59, пересекаемых i-M квадратиком квадрата 58 с помощью перекрытия, превьшающего определенную часть площади элементарного квадратика (наэлементарные кубики различным обра- зом перекрываются между собой. Ладим в соответствие каждому ква7;ратику 1x1 квадрата 58 пару логических элементов: двухвходовый элемент И 54 и
35
пример, 1/4 часть). При элемент И 54 вырождается в проводник, при соответствующие элементы И 54 и 55 исключаются. Соединим j-тый выход 5, квадратик KOTopof o пересекается i-M квадратиком входа 4 указанным обА1. Далее осуществляется переход к {икропрограмме извлечения следующей
команды программы.
Команда ВВ А1. Микрослово этой команды содержит :РУАВ 0, , - код режима Ввод, , . При выполнении этой микрокоманды по С1 на адресных входах узлов 40 памяти процессоров матрихда устанавливается код А1, подготавливаются элементы И 13 и 53, по С2 содержимое А1 записывается в регистры 8, с приразом, с одним из входов i-ro элемен- ходом СЗ информация с выходов разря- та И 54, а выход i-ro элемента И 55 - 45 До регистра 25 через элементы И 53 с J-M входом 4. В момент поступления входы 4 записывается в первый слой сигнала разрешения (1) на вторые входы элементов И 55 на входы 4 формируется изображение повернутого исходного содержимого сцены (негативное 50 представление) квадрата 59. В отличие от рассмот енного случая в каждом блоке 6 поворота предлагаемого устройства аппаратно реализуется поворот содержимого только одного квадранта 55 ° памяти процессоров матрицы уста- квадрата 59, т.е. совокупности куби- навливается код А1, подготавливают- ков последнего слоя куба матри- ся элементы И 13 и 46, по С2 произво- цы 1, не переходящих друг в друга дится запись содержимого А1 в регист- поворотах слоя на углы, кратшле 90, ры 8. С приходом СЗ импульс с выхода
сцены А1, в остальных слоях этой сцены размещается сдвинутое содержимое регистров 8.
Команда ВЬШ А1. Шкрослово этой команды содержит; , , , , - код режима Вывод. При выполнении этой микрокоманды по С1 на адресных входах узвокруг его центра. Поворот полного квадрата 59 осуществляется программно в четыре этапа (соответственно числу входящих в него квадрантов). С целью развязки связь входов 4 с элементами И 55 осуществляется посредством передатчиков 57 (например, неинвертирующих ключей с открытым коллектором),
а связь выходов 5 с элементами И 54 - посредством приемников 56 (например, эмиттерных повторителей). При выполнении микрокоманды по импульсу С1 на адресных входах узлов памяти процессоров матрицы устанавливается код А1, подготавливаются элементы И 13 и 32 (на выходе одного из элементов И 32, номер которого расположен в регистре
6 проходит на вход 4, В момент прихода СЗ содержимое регистров 8 со сдвигом на шаг записывается в узел ю памяти по адресу А1, в первый слой сцены А1 записывается изображе- ние повернутого квадранта последнего слоя 1 предыдущего содержимого
А1. Далее осуществляется переход к {икропрограмме извлечения следующей
команды программы.
Команда ВВ А1. Микрослово этой команды содержит :РУАВ 0, , - код режима Ввод, , . При выполнении этой микрокоманды по С1 на адресных входах узлов памяти процессоров матрихда устанавливается код А1, подготавливаются элементы И 13 и 53, по С2 содержимое А1 записывается в регистры 8, с приходом СЗ информация с выходов разря- До регистра 25 через элементы И 53 входы 4 записывается в первый слой ° памяти процессоров матрицы уста- навливается код А1, подготавливают- ся элементы И 13 и 46, по С2 произво- дится запись содержимого А1 в регист- ры 8. С приходом СЗ импульс с выхода
сцены А1, в остальных слоях этой сцены размещается сдвинутое содержимое регистров 8.
Команда ВЬШ А1. Шкрослово этой команды содержит; , , , , - код режима Вывод. При выполнении этой микрокоманды по С1 на адресных входах узс соответствующих входов в разряды регистра 24, одновременно вьшолняет- ся сдвиг содержимого А1 на шаг. Ввод и вывод содержимого всей сцены осуществляется программно с использованием дополнительной(рабочей) сценыи при- менением команд ИНЕА1 А2 и СДВА1,А2.
Койанда ОБ А1. Микрослово этой команды содержит: , , . По С2 содержимое А1 записывается в регистры 8 с приходом СЗ импульс с выхода элемента И 47 поступает на вход опроса второй ступени 18 аналогового сумматора, этот же импульс может быть использован для синхронизации работы анапого-цифро- вого преобразователя 19 (цифрового
роса преобразователя 49 и ступени 18 сумматора, а также на вход элемента 51 задержки на время С , С приходом этого импульса опрашиваются выходные каскады преобразователя 49 и ступени 18 и на их выходах одновременно формируются два импульса: амплитуда ного -из них пропорциональна значению кода, хранимому в регистре 26, а амплитуда другого импульса пропорциональна объему единичного содержимого регистров 8. Эти два импульса посту 5 пают на входы аналогового компаратора 50, с двух выходов которого через время f снимаются сигналы Равен/не равен нулю, Меньше/не меньше нуля, соответствующие результату сравнения.
импульсного вольтметра). Сигнал с вы- 2о Через время И импульс С с выхода хода ступени 18 поступает на аналогог элемента 51 задержки через подготовг- вый вход преоб)азователя 19, с при- ленный элемент И 52 () поступает ходом импульса с выхода элемента И на входы управления записью в соот- 47 начинается цикл аналого-цифрового ветствующие разряды регистра 34 кода преобразования этого сигнала, в течем 25 признаков и записьтает сигналы с вы- ние которого з1апрещено выполнение ходов компаратора 50 в эти разряды, команд типа ОБ А1. По окончании цикла Такие операции, как поворот сцены на
преобразования в регистре 20 располагается двоичный код значения объема единичного содержимого сцены А1.
В предпагаемом устройстве используется двухступенчатый аналоговый сумматор, первая ступень 17,которого вьтолнена по параллельной схеме, а втора:я ступень 18 - последовательуглы, кратные 90 , вокруг оси OZ (проходящей через центр куба сцены 30 и расположенной перпендикулярно осям ОХ и OY), перенос сцены вдоль направлений осей ОХ, OY и OZ, выполняются программно с применением рассмотренных команд. Число выполняемых в устройстве углов поворота, не кратной. Использование только параллель- ных 90°, определяется сеткой углов ной схемы приводит к большим инст- о(Ьаппаратно-реализрванных в бло- рументадьным ошибкам суммирования. Включение в состав узла 2 элемента
ках 6 (где О о(; 45°) . Повороты на углы ot ± ci(.+k -90° выполняют- iUJlH 21 вызвано необходимостью высоко-40 программно.
роса преобразователя 49 и ступени 18 сумматора, а также на вход элемента 51 задержки на время С , С приходом этого импульса опрашиваются выходные каскады преобразователя 49 и ступени 18 и на их выходах одновременно формируются два импульса: амплитуда одного -из них пропорциональна значению кода, хранимому в регистре 26, а амплитуда другого импульса пропорциональна объему единичного содержимого регистров 8. Эти два импульса поступают на входы аналогового компаратора 50, с двух выходов которого через время f снимаются сигналы Равен/не равен нулю, Меньше/не меньше нуля, соответствующие результату сравнения.
углы, кратные 90 , вокруг оси OZ (проходящей через центр куба сцены 30 и расположенной перпендикулярно осям ОХ и OY), перенос сцены вдоль направлений осей ОХ, OY и OZ, выполняются программно с применением рассмотренных команд. Число выполняемых в устройстве углов поворота, не крат
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для параллельной обработки трехмерных сцен | 1988 |
|
SU1689966A1 |
| УСТРОЙСТВО ОБРАБОТКИ ДВУХМЕРНЫХ И ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2005 |
|
RU2289161C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Устройство для параллельной обработки трехмерных сцен | 1990 |
|
SU1817109A1 |
| Устройство для параллельной обработки трехмерных сцен | 1988 |
|
SU1612307A2 |
| Устройство обработки изображений | 1989 |
|
SU1817108A1 |
| УСТРОЙСТВО ОБРАБОТКИ ДВУХМЕРНЫХ И ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2376637C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫСОКОАДАПТИВНЫМ АВТОНОМНЫМ МОБИЛЬНЫМ РОБОТОМ | 2019 |
|
RU2705049C1 |
| Микропроцессорное вычислительное устройство | 1982 |
|
SU1269145A1 |
| Многопроцессорная система | 1987 |
|
SU1464168A1 |
Изобретение относится к области программной обработки пространствен- ных сцен, предназначено для решения . задач размещения объектов в пространстве, задач распознавания трехмерных образов, задач трехмерной машинной графики, а также задач, в которых обработка информации может быть сведена к последовательному выполнению над трехмерными объектами теоретико-множественных операций, геометрических преобразований типа параллельного переноса и поворота в пространстве, процедур вычисления объема. Целью изобретения является повьппение быстродействия устройства. Выполнение сложных операций обработки трехмерных сцен в устройстве за время, сравнимое с тактом машины, сокращает время решения задач пространственной обработки, обеспечивает повышение качества получаемых машинных решений. 2 шт. (Л G
скоростного обнаружения сцен с абсолютно пустым содержимым. В состав предлагаемого устройства может быть ; введен блок аналогового сравнения, предназначенный для высокоскоростнр- го сравнения величины объема единичного содержимого сцены регистров 8 с, заданным значением, код которого хранится в регистре 26.
При наличии узла 48 команда ОБ А1 может быть использована для целей сравнения. В этом случае перед выполнением команды ОБ А1 код сравниваемого значения извлекается из узла 22 памяти и размещается в регистре 26. Информация с выходов разрядов регистра 26 поступает на входы цифроанало- гового преобразователя 49. В процессе вьтолнения ОБ А1 импульс с выхода
Формула из обре-тения
Устройство для параллельной обработки трехмерных сцен, соде(жащее трехмерную матрицу А процессоров ;(где А - целое число) и блок управления, причем каждый процессор содержит первый и второй регистры операндов, узел памяти, отличающе- , е с я тем, что, с целью повьш1ения быстродействия устройства, в него введены блок элементов И, два про- гр(аммно-адресуемых регистра, Е блоков поворота, причем в каждый про- . цессор матрицы введены блок элементов И, элемент ИЛИ-НЕ, элемент ИЛИ, причем выходы блока элементов И соединены с входами элемента ИЛИ, выход которого соединен с информационным входом узла памяти, выход которого соединен с информационными вхо дами первого и второго регистров операндов, выходы которых соединены соответственно с первым и вторым входами элемента ИЛИ-НЕ, выход которого соединен с входом блока элементов И, адресный вход узла памяти каждого процессора матрицы соединен с первым выходом блока управления, вход записи узла памяти каждого процессора матрицы соединен с вторым , выходом блока управления, вход блока элементов И каждого процессора матрицы соединен соответственно с третьим, четвертым, пятым и шестым выходами блока управления, входы разрешения записи первого и второго ре- гистров операндов всех процессоров матрицы соединены соответственно с седьмым и восьмым выходами блока управления, выходы первого регистра операнда всех процессоров матрицы соединены -с первой группой входов блока управления, причем выход первого регистра операнда i-ro процессора матрицы соединен с входом блока :элементов И соответствукщего ()-ro процессора матрицы в направлении В, параллельном одному из ребе куба матрицы,.выход первого регистра операнда i-ro процессора матрии ы соединен с входом блока элемеитов И toro процессора матрицы, в который переходит i-й процессор матрицы при повороте матрицы относительно ее первоначального положения на угол 90° по часовой стрелке вокруг оси ОХ проходящей через центр куба матрицы и направленной по направлению В, выход первого регистра операнда i-ro
Q g 0 5 о
5
процессора матрицы соединен с входом блока элементов И того процессора матрицы, в которьй переходит i-й процессор матрицы при повороте матрицы относительно ее первоначального положения на угол 90° по часовой стрелке вокруг оси OY, пересекающей центр куба матрицы и направленной& перпендикулярно оси ОХ, вход-выход блока управления соединен с информа- |ционным входом первого поогоаммно- адресуемого регистра, выход которо- .гс через первые входы блока элементов И устройства соединен с входом , блока элементов И всех процессоров первого относительно направления В слоя трехмерной матрицы и перпендикулярного данному направлению, с входом единичного потенциала устройства и с выходами блоков поворота, вторые входы блока элементов И уст- ройства соединены с девятым выходом блока управления, выход первого ре- . гистра операнда всех процессоров последнего относительно направления В слоя трехмерной матрицы, которые при поворотах на углы, кратные 90, вокруг оси ОХ не переходят друг в друга, а при поворотах на угол, некратный 90, не выходят за границы исходного слоя , соединен с соответствующими входами блоков поворота и информационным входом второго программно-адресуемого регистра, входы разрешения поворота блоков поворота соединены с первой группой выходов блока управления, десятый выход которого соединен с входом записи второго программно-адресуемого регистра, выход которого соединен с входом-выходом блока управления.
(.-«:t
.-I .
Ф Ф У « «
Фиг.г
| Стбян Ю.Г., Кулиш Е.Н | |||
| Автома- ; | |||
| тизация проектирования компоновки оборудования летательных аппаратов.- М.: Машиностроение, 1984 | |||
| Пронгишвили Н.В., Стецюра Г.Г | |||
| Микропроцессорные системы.-М.: Наука, 1980, с.197-205 | |||
| , |
