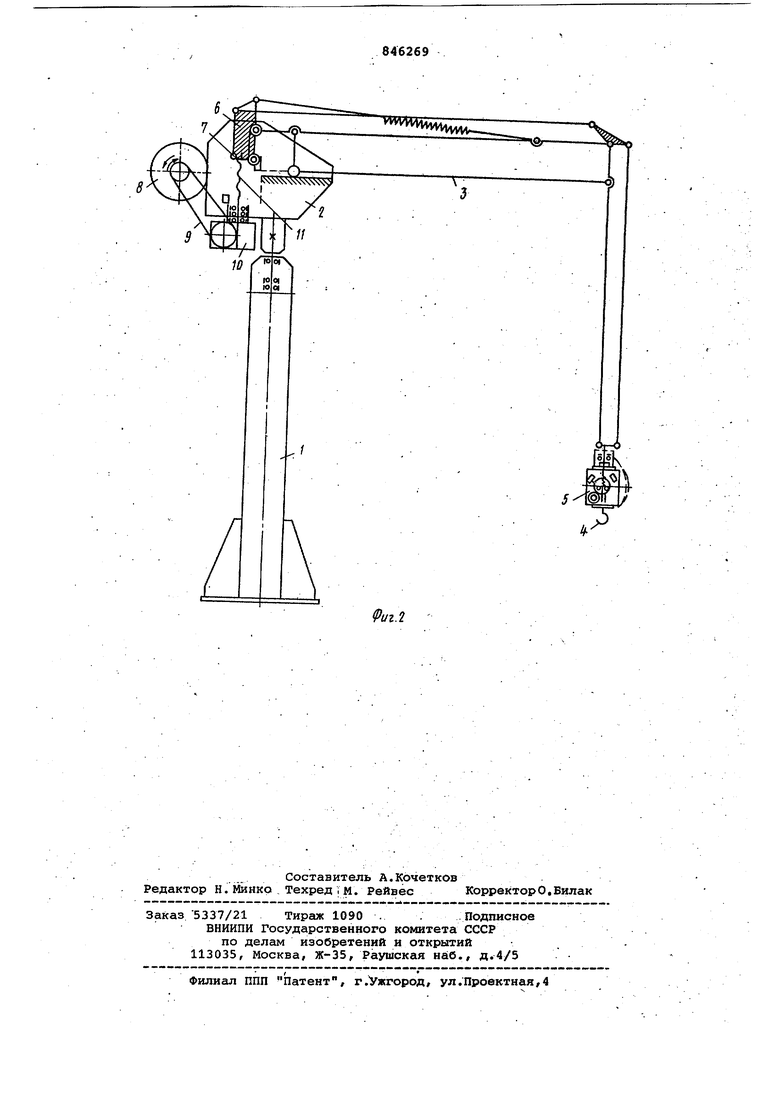
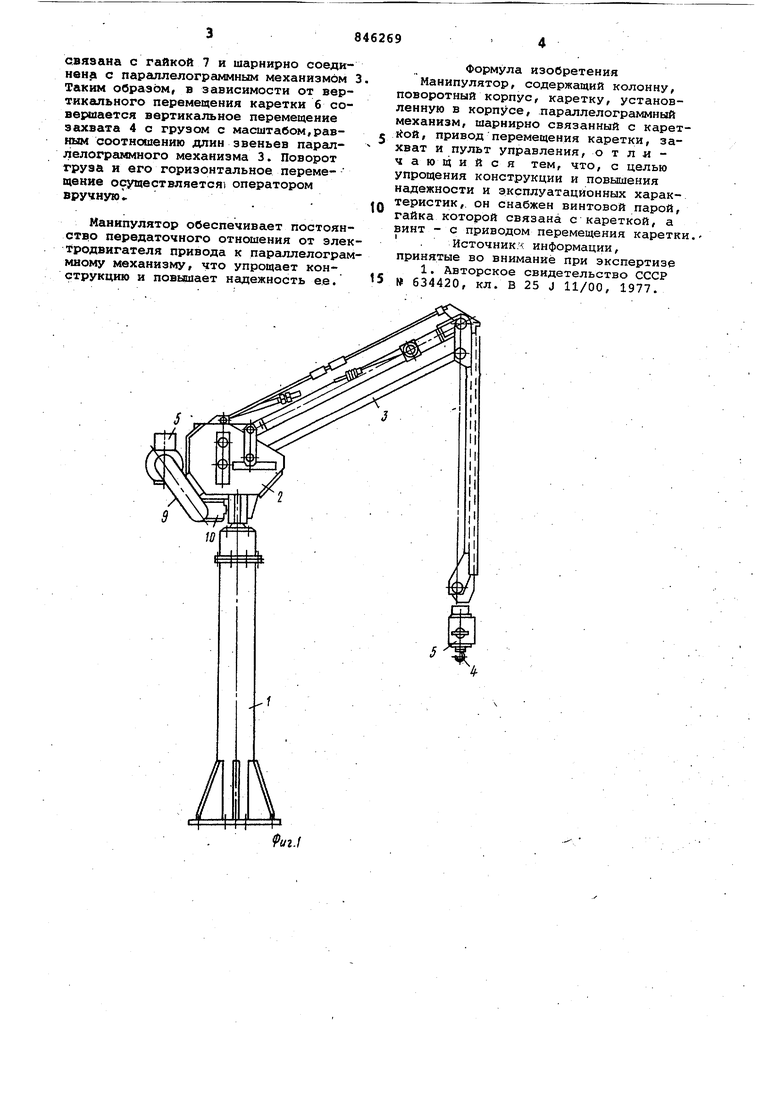
Изобретение относится к промышленным манипуляторам, предназначенным для межоперационного перемещения заготовок. Известен манипулятор, содержащий колонну, поворотный корпус, каретку, установленную в корпусе, параллелограммный механизм, шарнирно связанный с кареткой, привод перемещения каретки,захват и пульт управления 1 Недостатками этого манипулятора являются кинематическая сложность привода перемещения ввиду большого количества звеньев и наличия трения скольжения камня в пазу кулисного механизма, что снижает надежность его работы, а также кинематические свойства кулисного механизма, имеющего мертвые точки, которые обуславливают колебания передаточного отношения от привода к параллелограммному механизму в диапазоне от наибольшего до нулевого значения передаточного отношения, что создаёт неудобства в эксплуатации из-за раз.ных ско ростей подъема захвата манипулятора. Цель изобретения - упрощение конструкции манипулятора и повышение эксплуатационных характеристик манипулятора, путем обеспечения постоянного передаточного отношения от привода к параллелограммному механизму. Цель достигается тем, что манипулятор снабжен винтовой парой гайка которой связана с кареткой, винт с приводом перемещения каретки. На фиг.1 изображен предлагаемый манипулятор, общий вид; на фиг.2 кинематическая схема манипулятора. Манипулятор содержит колонну 1, поворотный корпус 2, параллелограммный механизм 3, захват 4, пульт 5 управления, подвижную каретку 6 с гайкой 7, привод перемещения каретки С электродвигателем 8, ременной передачей 9, червячным редуктором 10 и ходовым винтом 11. Ходовой винт 11 взаимодействуют с гайкой 7, установленной на каретке 6. Манипулятор работает следующим образом. .После закрепления груза в захвате 4манипулятора,оператор через пульт 5управления включает электродвигатель 8. Электродвигатель 8 через ременную передачу 9, червячный редуктор 10 и ходовой винт 11, взаимодействующий с гайкой 7, приводят в движение подвижную каретку 6, которая
связана с гайкой 7 и шарнирно соединена с параллелогра1имным механизмом 3 Таким образом, в зависимости от вертикального перемещения каретки 6 совершается вертикальное перемещение захвата 4 с грузом с масштабом,равным соотношению длин звеньев паргшлелограммного механизма 3. Поворот груза и его горизонтальное перемещенке осуществляется) оператором вручную
Манипулятор обеспечивает постоянство передаточного отношения от электродвигателя привода к параллелограммному механизму, что упрощает конструкцию и повышает надежность ее.
5
Формула изобретения Манипулятор, содержащий колонну, поворотный корпус, каретку, установленную в корпусе, параллелограммный механизм, шарнирно связанный с каретйой, привод перемещения каретки, захват и пульт управления, отличающийся тем, что, с целью упрощения конструкции и повышения надежности и эксплуатационных характеристик, он снабжен винтовой парой, гайка которой связана с кареткой, а винт - с приводом перемещения каретки.
Источник ; информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 634420, кл. В 25 J 11/00, 1977.
Ог-О
(риг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕРЕВООБРАБАТЫВАЮЩИЙ НАСТОЛЬНЫЙ КОМБИНИРОВАННЫЙ СТАНОК | 1992 |
|
RU2015877C1 |
| Манипулятор | 1980 |
|
SU908589A1 |
| ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2009969C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ АНТЕННЫ | 2015 |
|
RU2610519C1 |
| VIP-МЕХАНИЗМ ДЛЯ ПРЯМОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ПОДВЕШЕННОГО ГРУЗА | 2015 |
|
RU2605701C1 |
| Грузозахватное устройство | 1977 |
|
SU695943A1 |
| МАШИНА ДЛЯ ОБСЛУЖИВАНИЯ АЛЮМИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВ С ОБОЖЖЕННЫМИ АНОДАМИ | 1968 |
|
SU212545A1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ И ОРИЕНТИРОВАННОЙ УСТАНОВКИ ЕМКОСТЕЙ И ЕМКОСТЬ ДЛЯ ПЕРЕМЕЩЕНИЯ И ХРАНЕНИЯ | 2008 |
|
RU2379175C2 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |