Изобретение относится к подъемно- транспортному машиностроению, в частности к манипуляторам с приводом в виде винтовой пары, предназначенным для механизации погрузочно-разгрузочных работ, установки и снятия деталей при обслуживании металлообрабатывающих станков, ме- хано-сборочных работ и т.д.
Цель изобретения - снижение мощности и увеличение долговечности привода за
При включении электродвигателя 5 начинает вращаться винт 8 и ганка 9 перемещается вдоль его оси. При этом поворачивается рычаг 18 и поворотные звенья исполнительного органа 3, поднимающие или опускающие захватный орган 4 в зависимости от направления вращения электродвигателя.
При перемещении гайки 9 вдоль оси винта 8 жидкая смазка через отверстия 15
счет обеспечения работы кинематической О перетекает между полостями эластичных
пары винт - гайка в условиях жидкойскладных чехлов 11 и 12.
смазки.
На фиг. 1 изображен манипулятор об-Формула изобретения
щий вид; на фиг. 2 - разрез А-А на фиг. 1.
Манипулятор состоит из колонны 1, смонтированного на нем с возможностью поворота корпуса 2, исполнительного органа 3, выполненного в виде параллелограмма, щарнирно связанного с корпусом 2, захватного органа 4, смонтированного на звене
15
Манипулятор, содержащий смонтированный с возможностью поворота на колонне корпус, щарнирно связанный с ним исполнительный механизм, выполненный в виде параллелограмма, захватный орган, смонтированный на одном из звеньев иараллелоисполнительного органа 3, и привода, закреп- 20 грамма, и привод, закрепленный на корпусе ленного на корпусе 2 и состоящего из элек-и содержащий двигатель, редуктор и кинетродвигателя 5 клиноременной передачи 6матическую пару винт -- гайка, причем
и редуктора 7. Выходным звеном приводагайка щарнирно связана с поворотным звеявляется винт 8 с гайкой 9. На конце винтаном параллелограмма, отличающийся тем,
8 смонтирована щайба 10. Винт 8 заключенчто, с целью снижения мощности и увев два эластичных складных чехла 11 и 12, личения долговечности привода за счет обес- торцы которых герметично закреплены соот-печения работы пары винт - гайка в условетственно на деталях 9 и 10 и 9 и 7, имеющие ребра, к которым прикреплены шайбы 13 с радиальными отверстиями. Гайка 9
ВИЯХ жидкой смазки, пара снабжена двумя последовательно расположенными складными эластичными чехлами, заполненными
и.меет фланец с радиальными отверстиямижидкой смазкой и снабженными ребрами,
14 и отверстиями 15. На редукторе 7 закреп-расположенными перпендикулярно оси чехотверстиями 1о. На редукторе / закреп лены стержни 16, проходящие через отверстия в деталях 9 и 13. Противоположные концы стержней 16 закреплены на шайбе 10.
На гайке 9 имеются два щтифта 17, а к одному из поворотных звеньев параллелограмма жестко прикреплен рычаг 18 с вилкой, в пазах которой размещены штифты 7. Емкость, образованная внутренними полостями чехлов 11 и 12, заполнена жидкой смазкой.
Манипулятор работает следующим образом.
35
лов, торцы одного из которых герметично закреплены на гайке и редукторе, а другого- на гайке и дополнительно установленной на конце винта и шарнирно связанной с ним шайбе, причем в гайке выполнены отверстия для перетекания жидкой смазки, на ребрах чехлов закреплены жесткие щайбы с радиальными отверстиями, а на редукторе закреплены стержни, оси которых расположены параллельно оси винта, прохо.1.ящие через соответствующие отверстия в шайбах чехлов с зазором.
При включении электродвигателя 5 начинает вращаться винт 8 и ганка 9 перемещается вдоль его оси. При этом поворачивается рычаг 18 и поворотные звенья исполнительного органа 3, поднимающие или опускающие захватный орган 4 в зависимости от направления вращения электродвигателя.
При перемещении гайки 9 вдоль оси винта 8 жидкая смазка через отверстия 15
перетекает между полостями эластичных
ВИЯХ жидкой смазки, пара снабжена двумя последовательно расположенными складными эластичными чехлами, заполненными
лов, торцы одного из которых герметично закреплены на гайке и редукторе, а другого- на гайке и дополнительно установленной на конце винта и шарнирно связанной с ним шайбе, причем в гайке выполнены отверстия для перетекания жидкой смазки, на ребрах чехлов закреплены жесткие щайбы с радиальными отверстиями, а на редукторе закреплены стержни, оси которых расположены параллельно оси винта, прохо.1.ящие через соответствующие отверстия в шайбах чехлов с зазором.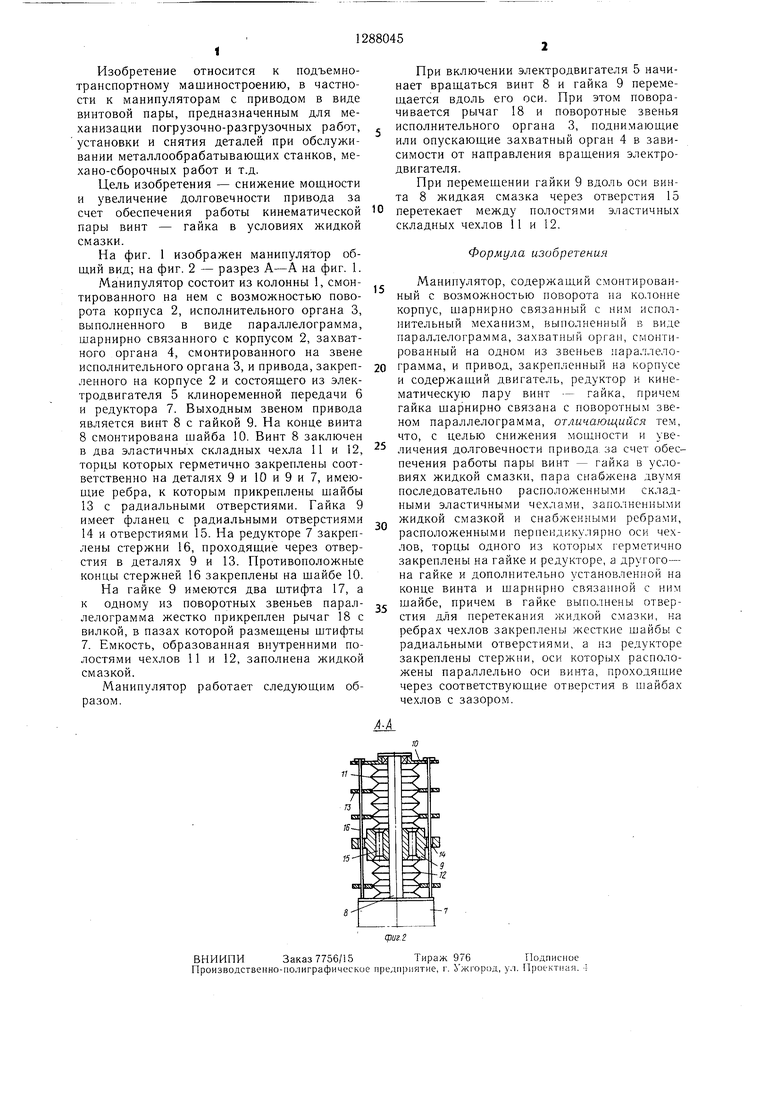
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1989 |
|
SU1668129A1 |
| Манипулятор | 1974 |
|
SU503710A1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ЧАСТИЧНО ПОВРЕЖДЕННОЙ ДВУХПУЧКОВОЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА, КАМЕРА ДЛЯ РАЗДЕЛКИ И ФАЛЬШТВЭЛ ДЛЯ ВОССТАНОВЛЕНИЯ ТОПЛИВНОЙ СБОРКИ | 1992 |
|
RU2072569C1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1722813A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2718812C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2721659C1 |
| АВТОМАТ ДЛЯ СБОРКИ ВЕНТИЛЕЙ ТРУБОПРОВОДОВ | 1972 |
|
SU338346A1 |
Изобретение относится к подъемно- транспортному машиностроению, в частности к манипуляторам с приводом в виде винтовой пары, предназначенным для механизации погрузочно-разгрузочных работ, установки и снятия деталей при обслуживании металлообрабатывающих станков, механосборочных работ и т. д. Цель изобретения - снижение мощности и увеличение долговечности привода за счет обеспечения работы кине.матической пары винт - гайка в условиях жидкой смазки. Маципу- лятор содержит исполнительный орган 3, размещенный на колонне 1, и привод 5, через клиноременную передачу 6 вращающий винт, по которому перемещается гайка 15. Винт размещен в герметичных чехлах 11 и 12, а в гайке 15 имеются отверстия для перетекания масла, залитого в чехлы. 2 ил. /г (Л to 00 00 О 4 01 fpaz.-f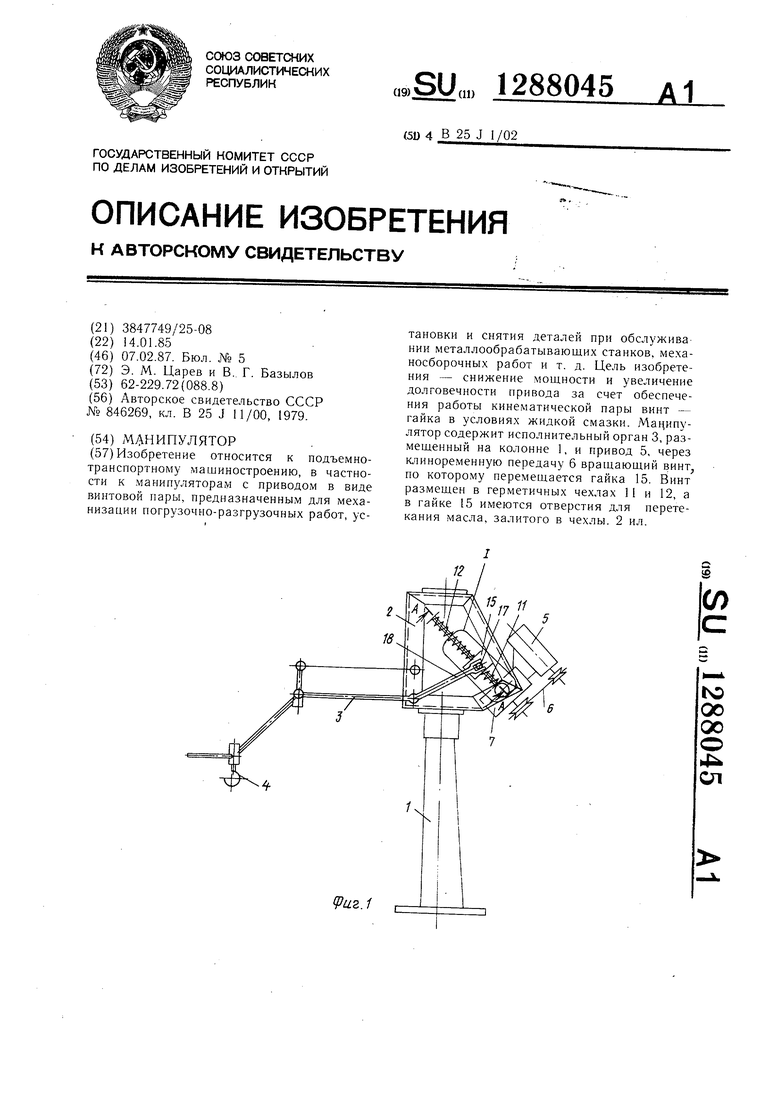
фиг. г
ВНИИПИЗаказ 7756/15Тираж 976Подписное
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная.
| Манипулятор | 1979 |
|
SU846269A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
