внутренних поверхностей цилиндрических горизонтальных резервуаров содержит борштангу 1, на которой установлены две пневмотурбины 2 с фреэер- ными головками 3. Борштанга 1 установлена fe шпиндельной втулке 4 барабана 5 каретки 6. Ведомьй барабан 5 приводится в двизкение ветвями 7, 8 гибкой связи от привода, расположенного вне обрабатываемого объекта. Борштанга I является штоком плунжерных пневмоци.пиндрсв и имеет возможность перемещаться во втулке 4 и вокруг своей оси в пределах, допускаемых пружинами сжатия-кручения 10, Сила прижима фрезерньк головок 3 обеспечивается за счет пружин 12,При подаче к пневмотурбикам 2 и плунжерным цилиндрам сжатого воздуха торцовые фрезы начинают вращаться и, прижимаясь, пружинами 2 к поверхности резервуара, скалывают дефектное покрытие, копируя геометрическую форму резервуара. Поворот борштанги 1 с фрезерными головками 3 на , а
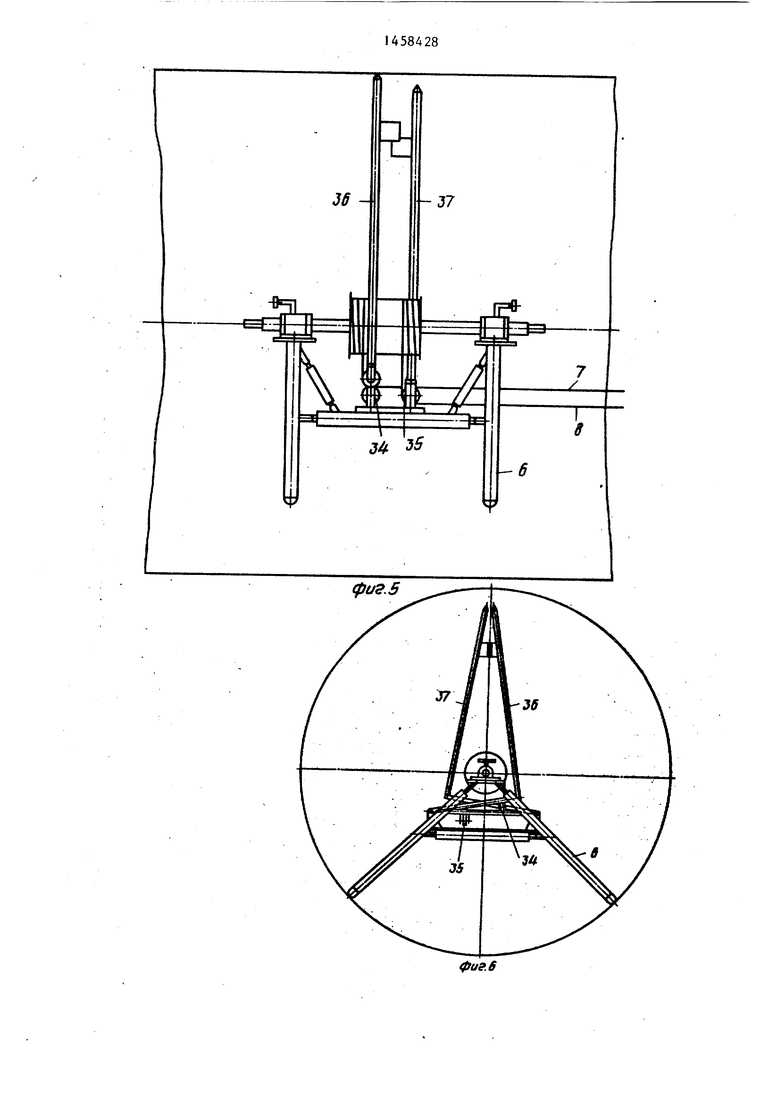
также движение каретки 6 горизонтально вдоль оси резервуара обеспечиваются приводом, расположеным вне емкости. Привод работает от электродвигателя и состоит из двух ведущих барабанов, связанных гибкой связью с ведомым барабаном 5, двух полумуфт, вилок-переключателей и кулачковых программаторов. Рычаги-фиксаторы 36 и 37, установленные в опорах качания 38 и 39, обеспечивают фиксацию устройства во время обработки и расфиксацию устройства во время движения по длине емкости. Такое конструктивное выполнение устройства позволяет за полный цикл бо штанге завершить два полуоборота на 180 , а торцовым фрезам очистить в автоматическом режиме от дефектного покрытия по окружности внутренней поверхности кольцевую полосу. При этом значительно сокращается время на обработку и улучшают условия труда. 3 з.п, ф-лы, 6 ил, 
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОШПИНДЕЛЬНЫЙ ПОЛУАВТОМАТ | 1966 |
|
SU222843A1 |
| КАНАТОУКЛАДЧИК | 1971 |
|
SU315686A1 |
| СТАНОК ДЛЯ БУРЕНИЯ ВЗРЫВНБ]Х СКВАЖИН | 1973 |
|
SU421758A1 |
| МНОГОСТОРОННИЙ СТРОГАЛЬНЫЙ СТАНОК | 1993 |
|
RU2041801C1 |
| Металлорежущий станок | 1984 |
|
SU1227367A1 |
| Многопозиционный, многошпиндельный полуавтоматический станок карусельного типа | 1960 |
|
SU139898A1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА КРЕПЛЕНИЯ ИНСТРУМЕНТА ДЛЯ ЦЕНТРА МЕХАНИЧЕСКОЙ ОБРАБОТКИ | 2009 |
|
RU2521545C2 |
| Товарный регулятор ткацкого станка | 1982 |
|
SU1101484A1 |
| Установка для продольной и поперечной резки бумажного полотна | 1987 |
|
SU1532306A1 |
| Автомат для изготовления плетеной металлической сетки | 1971 |
|
SU444593A1 |

Из-обретение относится к устройствам для удаления с внутренних поверхностей стационарных цилиндрических резервуаров дефектных лакокрасочных и эмалевых покрытий механическим способом. Цель изобретения - уменьшение времени за счет обеспечения автоматического режима обработки. Устройство для удаления лакокрасочных и эмалевых покрытий с 4 сл (Х to 00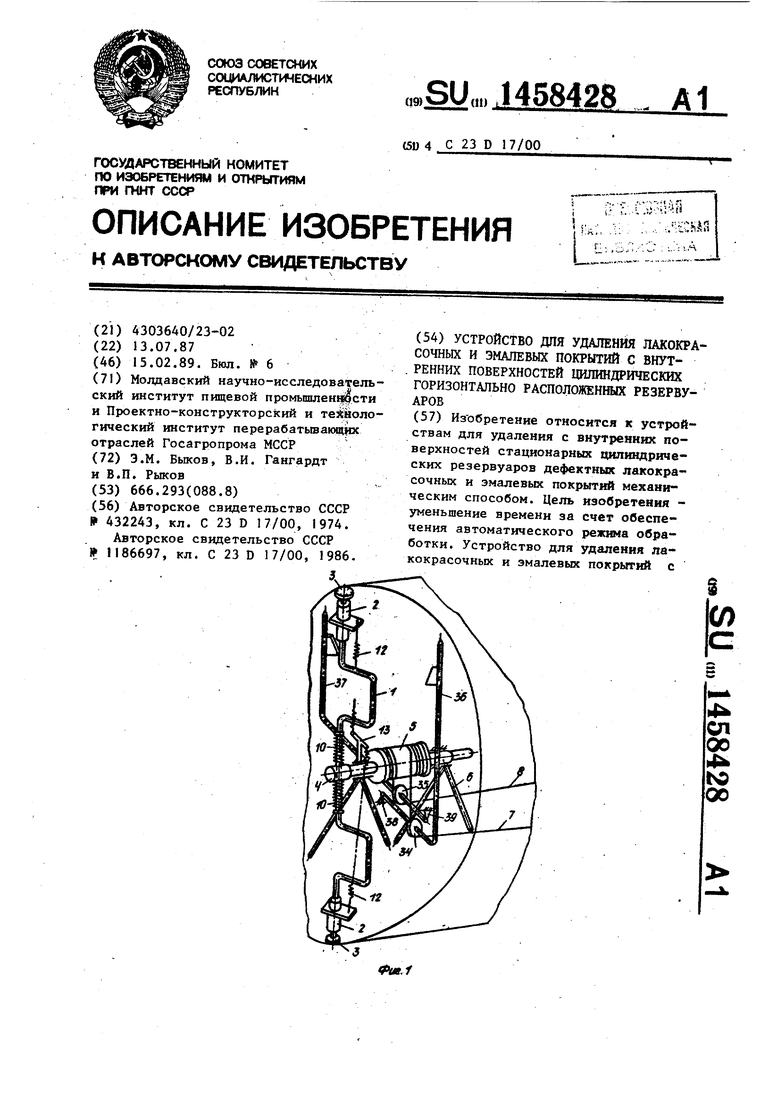
Изобретение относится к устройствам для удаления с внутренних поверхностей стационарньгх ци:1индрических резервуаров дефектных лакокрасочных и эмалевых покрытий механическим способом.
Цель изобретения - уменьшение времени за счет обеспечения автоматического режима обработки.
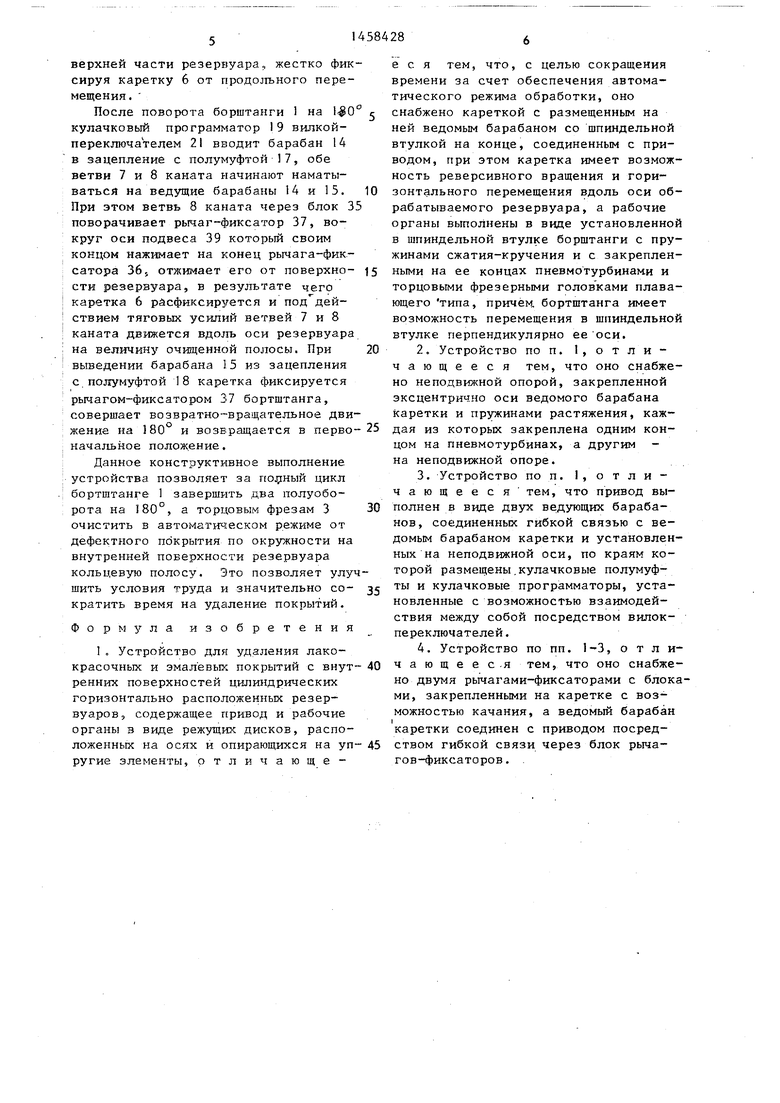
На фиг, 1 изображена каретка с ведомым барабаном, борштангой в комплекте с системой фиксации; .на фиг.2- выполнение борштанги с плунжерным цилиндром, пневмотурбиной и торцовой фрезой плавающего тип:а на- фиг, 3 - привод устройстваi на фиг, 4 - положение ведущих барабанов относительно полумуфт; на фиг, 5 - положение рычагов-фиксаторов при зафиксированном положении каретки относительно резервуара; на фиг, 6 - Положение рычагов- фиксаторов при расфиксированном положении каретки в поперечном сечении резервуара.
Устройство состоит из борштанги I, на которой установлены две пневмотурбины 2, оснащенные фрезерными головками 3 плавакзщего типа. Борштанга I
5 установлена в шпиндельной втулке 4 ведомого барабана 5 каретки 6, Приведение в возвратно-вращательное движение ведомого барабана 6 осуществляется двумя йетвями 7, 8 каната управ ления от привода, расположенного вне резервуара.
Борштанга 1 является штоком плунжерных пневмоцилиндров 9 и имеет возможность перемещаться в шпиндельной
5
0
5
втулке 4 и вокруг своей оси в преде.г лах, ограниченных двумя пружинами 10 сжатия-кручения. Проворот турбины 2 относительно борштанги ограничивается скалкой 11.
Саморегулирование силы прижима фрезерных головок 3 к поверхности ре- зервуара осуществляется двумя пружинами 12 растяжения, каждая из которых закреплена одним концом на пневмотург.
бине 2, а другим - на неподвижной оре 13, эксцентрично закрепленной на каретке 6 выше оси ведущего барабана 5.
В вертикальном положении разность усилий растяжения нижней и верхней пружины 12 компенсирует силу тяжести двух пневмотрубин 2 и фрезерных головок 3. При вращении борштанги раз- ность усилий пружин 12 уменьшается пропорционально вертикальной составляющей силы тяжести турбин 2 и фрезерных головок 3 и при горизонтально положении борштанги усилия в пружина 12 равны. Это обеспечивает одинаковую силу прижима фрезерных головок к поверхности резервуара в любом положении борштанги, зависящую только от усилий в пневмоцилиндрах.
Привод состоит из двух, ведущих барабанов 14 и 15, установленных на.неподвижной оси 16, двух полумуфт 17 и 18 кулачковых программаторов 19 и 20 с вилками-переключателями 21 и 22.
Постоянно вращающиеся в противоположных направлениях полумуфту 17 и 18 и кулачковые программаторы I9 и 20 могут приводиться в движение от электродвигателя 23 через систему кли ноременных, червячных и зубчатых передач.
Система передачи включает электродвигатель 23 клиноременную передачу 24,. бесступенчатый вариатор 25, червячный редуктор 26, которые могут передавать вращение на раздаточный вал 27, два червячных редуктора 28 и 29, на винтовые передачи 30 и 31 с противоположными направлениями зубьев и на кулачковые полумуфты 17 и 18. С кулачковых полумуфт через зубчатые передачи 32 и 33 вращение, может передаваться на кулачковые программаторы 19 и 20, которые обеспечивают полный цикл работы устройства, приведенный к одному обороту кулачкового программатора.
Ведущие барабаны 14 и 15 (фиг. 3 и 4) могут входить поочередно в зацепление с одной из полумуфт 17 и 18 и вращаться в одном или противоположном направлениях. Режим вращения задается кулачковыми программаторами 19 и 20.
Фиксация каретки 6 относительно резервуара при возвратно-вращательном движении борштанги 1 и расфик- сации ее при продольной подаче карет
5
ки вдоль оси резервуара во время выстоя бортштанги в вертикальном положении осуществляется системой блоков 24 и 35, рычагов-фиксатог-ов 36 37, подвешенных на опорах 38 и 39 каретки 6.
Устройство работает следующим об- разом.
При подаче к пневмотурбинам 2 и плунжерным цилиндрам 9 сжатого воздуха торцовые фрезы 3 начинают вращать |ся и, прижимаясь с определенной си- лой к поверхности резервуара, регулируемой пружинами и растяжения и плунжерными пневмоцилиндрами 9, ска лывают остатки дефектного покрытия, копируя геометрическую форму поверхности резервуара и не нарушая металлической основы.
При включении привода крутящий момент от электродвигателя 23 через систему передачи преобразуется во вращательное двшсение полумуфт 17 и 18 икачательное вилок-переключателей 21 и 22. в первоначальном положении ветвь 7 каната управления наматывается на барабан 15, а ветвь 8 сматывается с барабана 14, что обеспечи- вает вращение ведомого барабана 5 и бортштанги 1 на 180. При сцеплении барабана 15 с полумуфтой 18, а барабана 4 с полумуфтой 17 обе ветви каната 7 и 8 наматьшаются на барабаны 14 и 15 соответственно, что обеспечивает продвижение каретки 9 вдоль оси резервуара.
В положении ветвь 8 наматывается на барабан 14, а ветвь 7 сматьшается с барабана 15, что обеспечивает вращение ведомого барабана 5 и борштанги 1 на 180° в противоположном от первоначального направления.
Таким образом, тяговые усилия вет- вей 7 и 8 каната поочередно преобразуются в возвратно-вращательное движение ведомого барабана 5с борштан- гой 1 и движение каретки 6 вдоль оси резервуара.
В первоначальном положении ветвь каната 7 наматывается на ведущий барабан 15, сматываясь с ведомого барабана 5, огибая при этом блок 34 под углом 90. При этом результирующее усилие, в ветви 7 каната, направленное вверх под углом 45°, приводит рычаг-фиксатор 36 во вращение вокруг оси подвеса и прижимает его конец к
верхней части резервуара., жестко фиксируя каретку 6 от продольного перемещения .
После поворота борштанги на 0 кулачковый программатор 19 вилкой- переключателем 21 вводит барабан 14 в зацепление с полумуфтой 17, обе ветви 7 и 8 каната начинают наматываться на ведущие барабаны 14 и 15. При этом ветвь 8 каната через блок 3 поворачивает рычаг-фиксатор 37, вокруг оси подвеса 39 который своим концом нажимает на конец рычага-фиксатора 36i отжимает его от поверхно- сти резервуара, в результате чего каретка 6 рйсфиксирз ется и под действием тяговых усилий ветвей 7 и 8 каната движется вдоль оси резервуара на величину очищенной полосы. При выведении барабана 15 из зацепления с. полумуфтой 18 каретка фиксируется рычагом-фиксатором 37 бортштанга, совершает возвратно-вращательное движение на 180° и возвраща .тся в перво начальное положение.
Данное конструктивное выполнение устройства позволяет за пoJpный цикл бортштанге 1 завершить два полуоборота на 180°, а торцовым фрезам 3 очистить в автоматич1еском режиме от дефектрюго покрытия по окружности на внутренней поверхности резервуара кольцевую полосу. Это позволяет улушить условия труда и значительно со- кратить время на удаление покрытий.
Формула изобретения
1 Устройство для удаления лакокрасочных и эмалевых покрытий с внут ренних поверхностей цилиндрических горизонтально расположенных резервуаров, содержащее привод и рабочие органы в виде режущшс дисков, расположенных на осях и опирающихся на уп ругне элементы, отличающееся тем, что, с целью сокращения времени за счет обеспечения автоматического режима обработки, оно снабжено кареткой с размещенным на ней ведомым барабаном со шпиндельной втулкой на конце, соединенным с приводом, при этом каретка имеет возможность реверсивного вращения и горизонтального перемещения вдоль оси обрабатываемого резервуара, а рабочие органы выполнены в виде установленной в шпиндельной втулке борштанги с пружинами сжатия-кручения и с закрепленными на ее концах пневмотурбинами и торцовыми фрезерными головками плавающего типа, причем, бортштанга имеет возможность перемещения в шпиндельной втулке перпендикулярно ее оси.
W
fpuaZ
12
2в
(риг.
Л
Л.
Г1
ь
Т
Ц1
.1)30
й±г
JIO
.-r Ч
й р.4
1458428
л
Л
e
iiT
у ffi
hu
,|
d
а
А
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ПОКРОБИОИ ЗАДАЛИ С БОРТОВ ЭМАЛИРУЕМЫХ ИЗДЕЛИК | 1972 |
|
SU432243A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для удаления стеклянного покрытия с внутренней поверхности трубы | 1984 |
|
SU1186697A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
