Изобретение относится к машиностроению и может быть использовано в различных робототехнических и подъемно-транспортных устройствах.
Цель изобретения - повышение точности и надежности за счет уменьшения степени деформирования пружины.
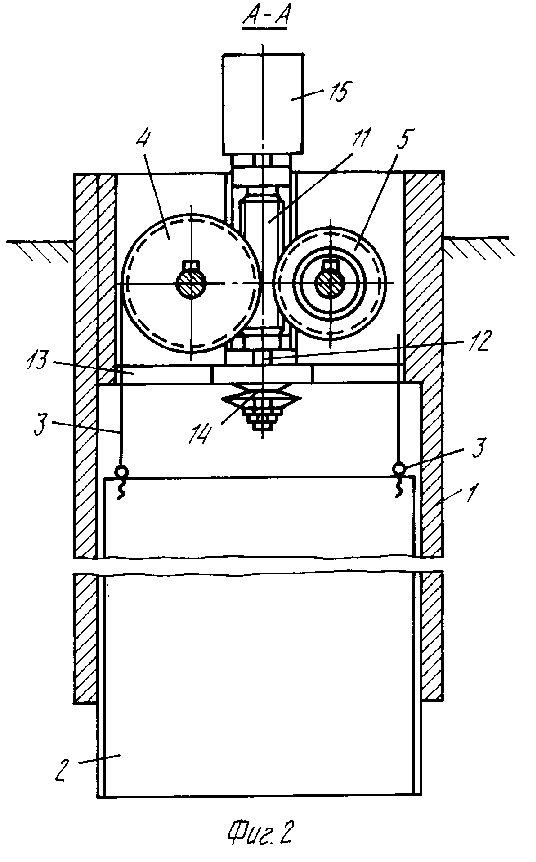
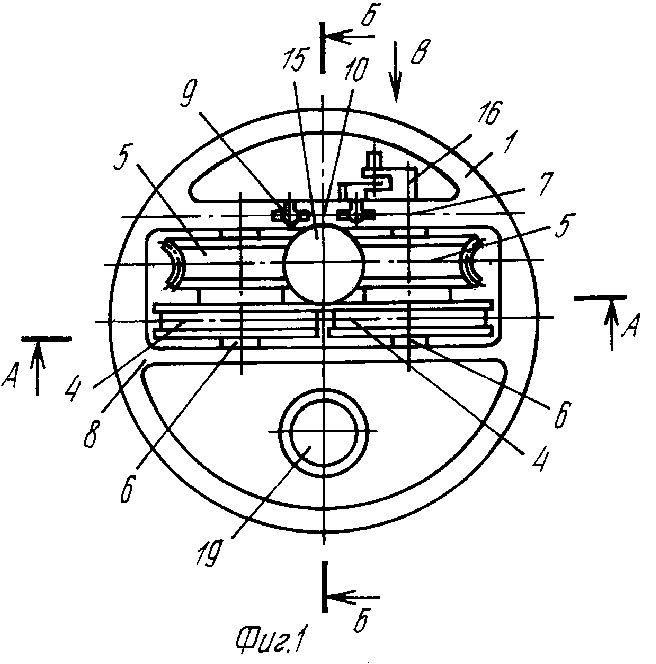
На фиг. 1 представлен общий вид устройства, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид по стрелке В на фиг. 1.
Телескопическая секция манипулятора состоит из неподвижной части 1, в которой размещена внутренняя выдвижная часть 2 с закрепленными на ней с возможностью регулирования натяжения гибкими элементами 3, противоположные концы которых закреплены на блоках 4, которые совместно с червячными колесами 5 жестко насажены на оси 6, расположенные с возможностью вращения в переборках 7 и 8 неподвижной части 1. На переборке 7 закреплены направляющие 9, на которых установлен дополнительный корпус 10 червячка 11, снабженного хвостовиком 12, проходящим сквозь отверстие в перегородке 13 секции. Червяк 11 расположен в дополнительном корпусе 10 с возможностью поступательного перемещения вдоль оси частей 1,2 секции. Дополнительный корпус 10 подпружинен относительно неподвижной части 1 пружинным механизмом 14. Червяк 11 входит в зацепление с колесами 5 и снабжен приводом 15, статор которого (не показан) закреплен на дополнительном корпусе 10.
Пружинный механизм 14 рассчитан на вес выдвигаемой части 2 и дополнительную нагрузку от устанавливаемых на ней механизмов и поднимаемых грузов. Уравновешивание происходит за счет деформации пружинного механизма 14.
Переключающий элемент представляет собой путевой датчик 16, одна часть 17 которого закреплена на вертикальной переборке 7 неподвижной части 1 с возможностью ограниченного перемещения вдоль червяка 11, а другая часть 18 - на дополнительном корпусе 10.
Приводное устройство выполнено в виде второго привода 19, корпус которого закреплен на неподвижной части 1, а выходной вал 20 привода 19 кинематически связан с винтом 21, взаимодействующим с гайкой 22, закрепленной на внутренней выдвижной части 2.
Часть 17 путевого датчика 16 устанавливается в исходное положение пружинами 23, закрепленными между частью 17 датчика 16 и переборкой 7. На части 17 жестко закреплен электромагнит 24. Путевые выключатели 25 установлены на переборке 7.
Механизм работает следующим образом.
При обесточенных двигателях привода 15,19 выдвижная часть 2 неподвижна, ее собственный вес с манипулятором удерживает пружинный механизм 14. Для перемещения части 2 вниз включают реверсивный привод 19 в соответствующем направлении, через винт 21 передают нагрузку на гайку 22, закрепленную на части 2 и через гибкий элемент 3, блоки 4, оси 6, червячные колеса 5, червяк 11 и дополнительный корпус 10, установленный на направляющих, нагрузку передают на пружинный механизм 14 и на нем происходит рассогласование усилий, пружины механизма 14 сжимаясь, перемещают дополнительный корпус 10 с червяком 11 вверх. Привод 15 при этом вращает червяк 11, который передает вращение на червячное колесо 5 и через ось 6 - на барабан, гибкие элементы 3, приводит в движение части секции. При этом одновременно с включением двигателя через выходной вал 20 включается электромагнит 24, соединяя части 17 и 18 датчика 16. При перемещении корпуса 10 пружина 23 сжимается и происходит включение путевого выключателя 25. Тем самым включается привод 15. Скорости перемещения выходных элементов обоих приводов одинаковы. Происходит согласованное движение секции в любом направлении. При выключении двигателя отключается электромагнит 24, часть 17 с помощью пружин 23 встает в исходное положение, отключая привод 15. (56) Авторское свидетельство СССР N 897499, кл. B 25 J 17/00, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| Манипулятор | 1987 |
|
SU1537516A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| ВЫДВИЖНОЙ АНГАР | 2014 |
|
RU2582739C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Устройство для уравновешивания подвижного органа | 1974 |
|
SU482254A1 |
| Токарный многооперационный станок | 1985 |
|
SU1321526A1 |

Изобретение относится к машиностроению и может быть использовано в различных робототехнических подъемно-транспортных устройствах. Цель изобретения - повышение точности и надежности за счет уменьшения степени деформирования пружины. Для перемещения подвижной части вниз включают реверсивный привод, через винт передают нагрузку на гайку. Через гибкий элемент, блоки, оси, червячные колеса, червяк и дополнительный корпус нагрузка передается на пружинный механизм. Пружины сжимаются и перемещают корпус с червяком вверх. Привод при этом вращает червяк, который передает вращение на червячное колесо и барабан. Скорости перемещения выходных элементов обоих приводов одинаковы. 4 ил.
ТЕЛЕСКОПИЧЕСКАЯ СЕКЦИЯ МАНИПУЛЯТОРА, содержащая подвижное и неподвижное звенья, основной двигатель, установленный на неподвижном звене и кинематически связанный с подвижным звеном с помощью передачи винт - гайка, а также механизм уравновешивания подвижного звена, имеющий пружину, установленную на неподвижном звене, барабан, кинематически связанный с подвижным звеном гибким элементом, а также ползун, установленный в направляющих на неподвижном звене, отличающаяся тем, что, с целью повышения точности и надежности за счет уменьшения степени деформирования пружины, она снабжена дополнительным приводом, имеющим дополнительный двигатель со схемой управления, установленный на ползуне и кинематически связанный с барабаном механизма уравновешивания посредством дополнительно введенной червячной передачи, червяк которой смонтирован на ползуне этого механизма, а ее червячное колесо жестко закреплено на барабане, и концевыми выключателями, установленными на неподвижном звене и взаимодействующими с ползуном, причем эти выключатели подключены к схеме управления дополнительного двигателя, при этом пружина жестко соединена с ползуном.
