Фиг.
Изобретение относится к машиностроению и может быть использовано в робототехнике.
Цель изобретения - повышение надежности за счет уменьшения приводов.
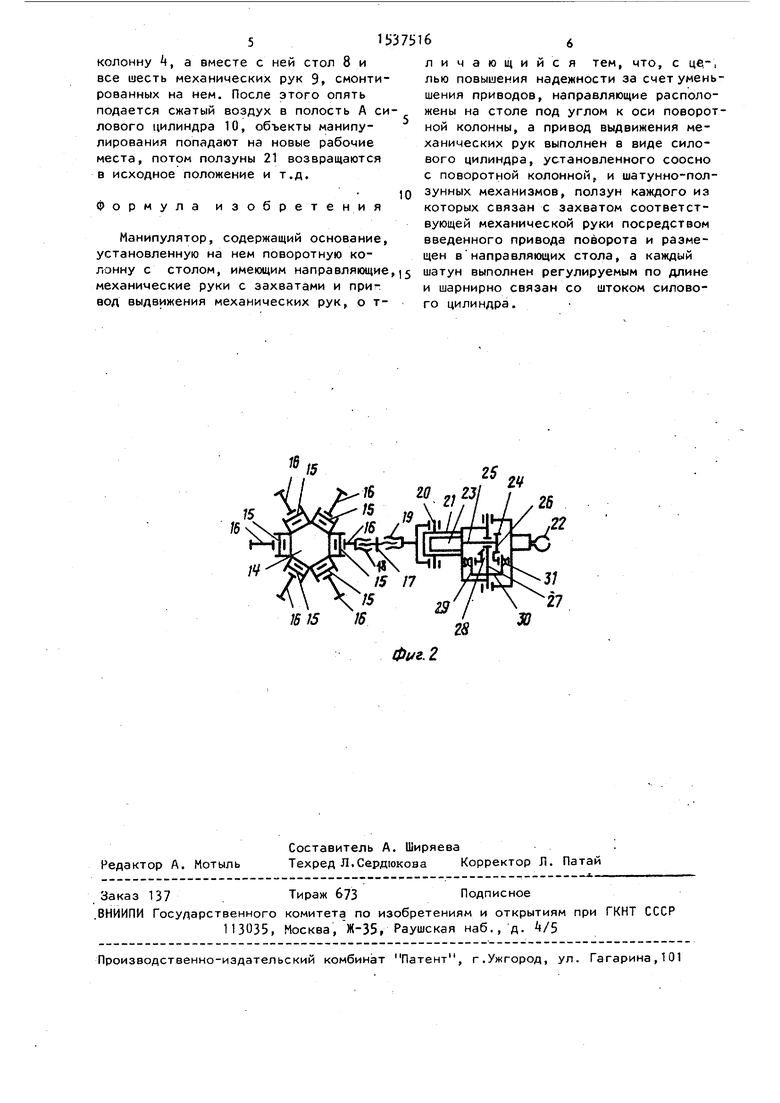
На фиг. 1 изображена кинематическая схема манипулятора, продольный разрез на фиг. 2 - кинематическая схема механической руки манипулятора.
Манипулятор содержит основание 1, в котором на подшипниковых опорах 2 и 3 смонтирована поворотная колонна 4 с приводом поворота, включающим двигатель 5, неподвижно закрепленный на основании 1, и червячную передачу, червячное колесо 6 которой связано с поворотной колонной 4, а червяк 7 с выходным валом двигателя ij. На поворотной колонне 4 жестко закреплен стол 8 с направляющими, выполненными под углом к оси поворотной колонны, в которых установлены механические руки 9. Привод выдвижения всех механических рук имеет силовой цилиндр 10, например пневмоцилиндр, установленный соосно поворотной колонне 4 и связанный со столом 8 посредством стоек 11, и шатунно-ползунные механизмы. Поршень 12 силового цилиндра 10 пост редством штока 13 связан с переходником 14, имеющим форму шестигранника, на каждой грани которого посредством цилиндрических шарниров 15 закреплены шатуны 16 шатунно-ползунных механиз- мов. Длину каждого шатуна 16 можно регулировать посредством винга 17 и гаек 18 и 19.
Каждый шатун 16 при помощи цилиндрического шарнира 20 связан с ползу- ном 21, смонтированным в направляющих стола 8. Каждый ползун 21 связан с корпусом соответствующей механической руки 9 включающей захват 22 с приводами его зажима и поворота.
Привод поворота захвата 22 каждой механической руки 9 состоит из двигателя 23, закрепленного на ползуне 21, и конической и волновой передач. Причем ведущее зубчатое колесо 24 конической передачи связано с выходным валом 25 двигателя 23, а ведомое зубчатое колесо 26 закреплено на валу 27 шарнира поворота захвата 22. На этом
20
25
ю
ш30 35 40
75164
со 31 неподвижно связаны с ползуном 21, являющимся для рассматриваемого шарнира ведущим звеном, а ведомым звеном является захват 22, связанный с жестким колесом 31, опирающимся на вал 27 через подшипники 32. Привод зажима захвата имеет пневматический привод (не показан).
Манипулятор работает следующим образом.
Рассмотрим -пример обслуживания манипулятором шести рабочих мест, расположенных вокруг него. При подаче сжатого воздуха в полость А силового цилиндра 10 поршень 12, шток 13 и связанный с ним переходник 1.4 получают осевое перемещение и через шарнирные соединения 15 воздействуют на шатуны 16, которые при этом совершают плоскопараллельное движение и вызывают перемещение ползунов 21 от центра стола 8 по его наклонным направляющим. Величина ползуна 21 определяется ходом штока 13 и установленной длиной шатуна 16, которая регулируется посредством винта 17 и гаек 18 и 19- Вместе с ползуном 21 перемещается связанный с ним захват 22, Если кажется, что объект манипулирования занимает место, не соответствующее высоте расположения захвата 22, то включается двигатель 23 и от него получают вращение его выходной вал 25, ведущее зубчатое колесо 24, ведомое зубчатое колесо 26 и связанный с ним генератор 29 волн волнового редуктора. Вращаясь, генератор 29 волн деформирует неподвижно закрепленное на валу 27 гибкое колесо 30,которое, зацепляясь с жестким колесом 31, сообщает ему и связанному с ним захвату 22 поворотное движение на угол, обеспечивающий требуемое расположение зажимных элементов по отношению к объекту манипулирования. Подается сжатый воздух в привод зажима и происходит, например, захват объекта манипулирования (одновременно шести). После этого по команде подается сжатый воздух в полость Б силового цилиндра 10, вследствие чего поршень 12, шток 13 и переходник 14 перемещаются в обратном направлении и через шатуны 16 возвращают ползуны 21
45
50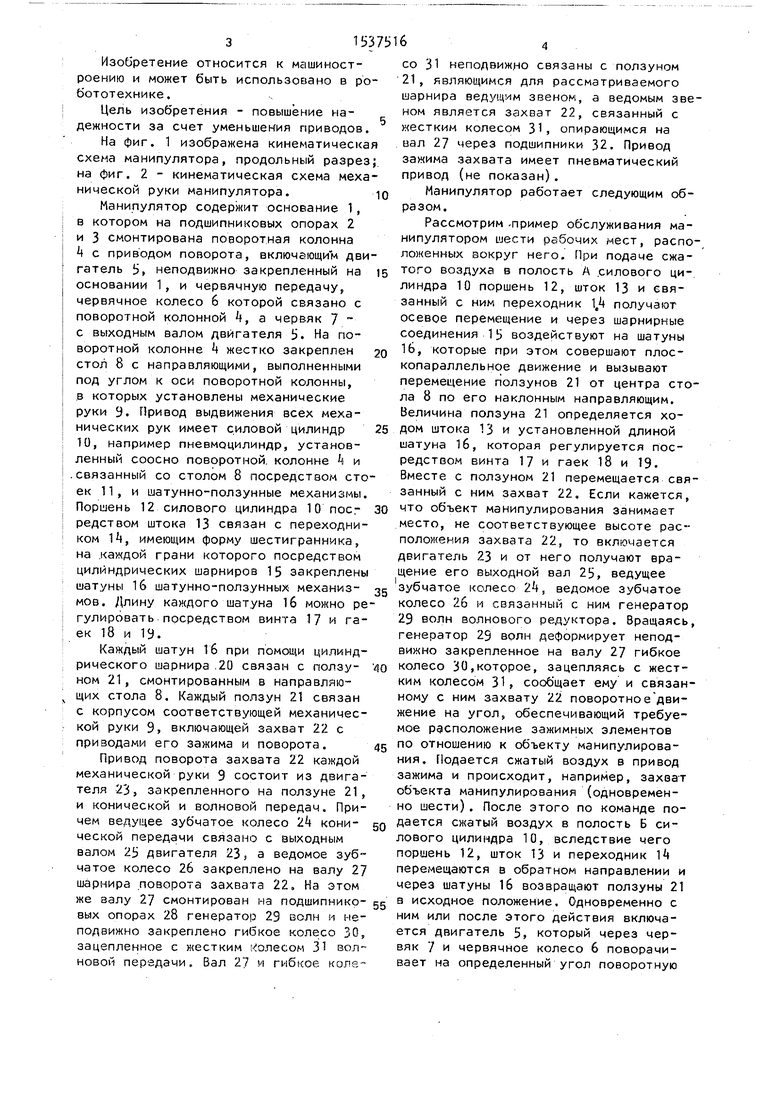
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1563965A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
| Манипулятор | 1979 |
|
SU850372A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Манипулятор | 1979 |
|
SU804171A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ, ПОВОРОТНО-ГИБОЧНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ И МАНИПУЛЯТОР ЛИСТОВ К ГИБОЧНОМУ ПРЕССУ | 1993 |
|
RU2110349C1 |
| Манипулятор | 1979 |
|
SU901046A1 |
| Автооператор | 1988 |
|
SU1549718A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Манипулятор | 1988 |
|
SU1593944A1 |
Изобретение относится к машиностроению и может быть использовано в работотехнике. Целью изобретения является повышение надежности за счет уменьшения приводов. Это достигается тем, что подъем и выдвижение всех механических рук осуществляется от одного силового цилиндра 10, расположенного соосно с поворотной колонной 4 и передающего перемещение механическим рукам посредством шатунно-ползунных механизмов, ползуны 21 которых установлены в направляющих стола 8, расположенных под углом к оси поворотной колонны 4. При этом шатуны выполнены регулируемые по длине, а ползуны 21 связаны с захватами посредством приводов поворота. 2 ил.
же залу 27 смонтирован на подшипнике- 55B исходное положение. Одновременно с
вых опорах 28 генератоо 29 волн и не-ним или после этого действия включаподвижно закреплено гибкое колесо 30,ется двигатель 5, который через черзацепленное с жестким Колесом 31 вол-вяк 7 и червячное колесо 6 поворачиновой передачи. Вал 27 и гибкое коле-вает на определенный угол поворотную
51
колонну А, а вместе с ней стол 8 и все шесть механических рук 9, смонтированных на нем. После этого опять подается сжатый воздух в полость А слового цилиндра 10, объекты манипулирования попадают на новые рабочие места, потом ползуны 21 возвращаются в исходное положение и т.д.
Формула изобретения
личающийся тем, что, с целью повышения надежности за счет умен шения приводов, направляющие располо жены на столе под углом к оси поворо ной колонны, а привод выдвижения механических рук выполнен в виде силового цилиндра, установленного соосно с поворотной колонной, и шатунно-пол зунных механизмов, ползун каждого из которых связан с захватом соответствующей механической руки посредством введенного привода поворота и размещен в направляющих стола, а каждый
Манипулятор, содержащий основание, установленную на нем поворотную колонну с столом, имеющим направляющие,|5 шатун выполнен регулируемым по длине механические руки с захватами и при- и шарнирно связан со штоком силово- вод выдвижения механических рук, о т- го цилиндра.
/5/5
6
личающийся тем, что, с це, лью повышения надежности за счет уменьшения приводов, направляющие расположены на столе под углом к оси поворотной колонны, а привод выдвижения механических рук выполнен в виде силового цилиндра, установленного соосно с поворотной колонной, и шатунно-пол- зунных механизмов, ползун каждого из которых связан с захватом соответствующей механической руки посредством введенного привода поворота и размещен в направляющих стола, а каждый
шатун выполнен регулируемым по длине и шарнирно связан со штоком силово- го цилиндра.
фуг. 2
| Юревич Е.И | |||
| и др | |||
| Устройство промышленных роботов | |||
| -Л.: Машиностроение, 1980, с | |||
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
