1
Изобретение относится ,к горной промьшшенности, в частности к области работ по монтажу-демонтажу механизированной крепи.
Цель изобретения - повьшение эффективности монтажных работ при различных технологических схемах выемки.
На фиг. 1 показан монтажный станок при монтаже (демонтаже) механизированной крепи; на фиг, 2 - разрез А-А на фиг. 1j на фиг, 3 - монтаж (демонтаж) звеньев направляющих монтажным станком; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг, 5 - разрез В-В на фиг. 4; на фиг. 6 - разрез Г-Г на фиг. 5; на фиг. 7 - монтаж (демонтаж) станка-, на фиг, 8- разрез Д-Д на фиг. 7; на фиг. 9 - захват станком монтируемой секции крепи.
Монтажный станок 1 (тяжелый горный манипулятор) включает в себя опорную 2, нижнюю 3, среднюю 4, промежуточную 5 и верхнюю телескопическую 6 рамы (фиг. 1 и 2), Опорная рама 2 имеет- ходовые тележки 7 для перемещения по звеньям направляющих 8 и соединена с одной боковой стороны посредством шарниров 9, ас другой - посредством гидроцилиндров 10, обеспечивающих возможность изменения максимального угла наклона нижней рамы 3 относительно опорной 2 в зависимости от угла падения пласта (от О до 90°). На опорной раме 2 закреплен гидроцилиндр 11 продольной подачи, связанный с якорным устройством 12, взаимодействующим с балками 13 звеньев направляющих 8. Нижняя рама 3 соединена со средней 4 механизмом поперечной подачи, включаю- щш гидроцилиндры 14 и направляющие
15. Средняя рама 4 соединена с промежуточной 5 шарнирами 16 и поворотными гидроцилиндрами 17, Верхняя
телескопическая рама 6, снабженная гидроцилиндром 18 для ее раздвижки, соединена с промежуточной 5 также шарнирами 19 и поворотными гидроцилиндрами 20, имеет захваты 21 для
0 установки и крепления секций 22 крепи 23, звеньев направляющих 8,
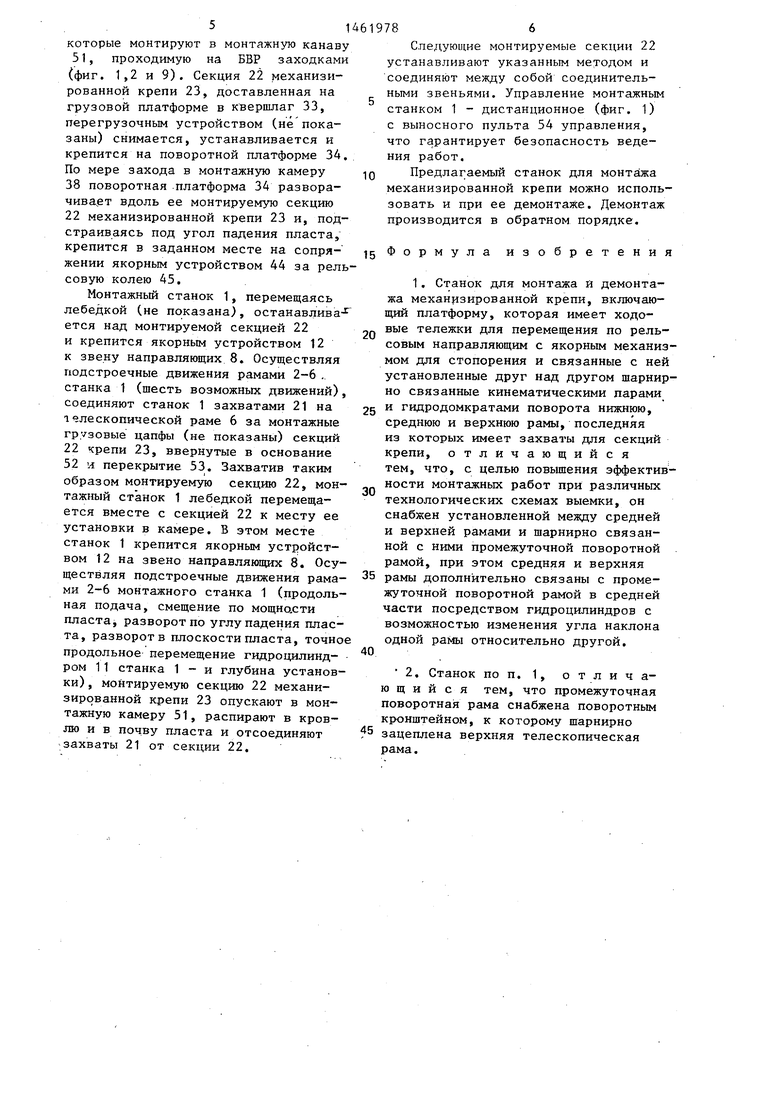
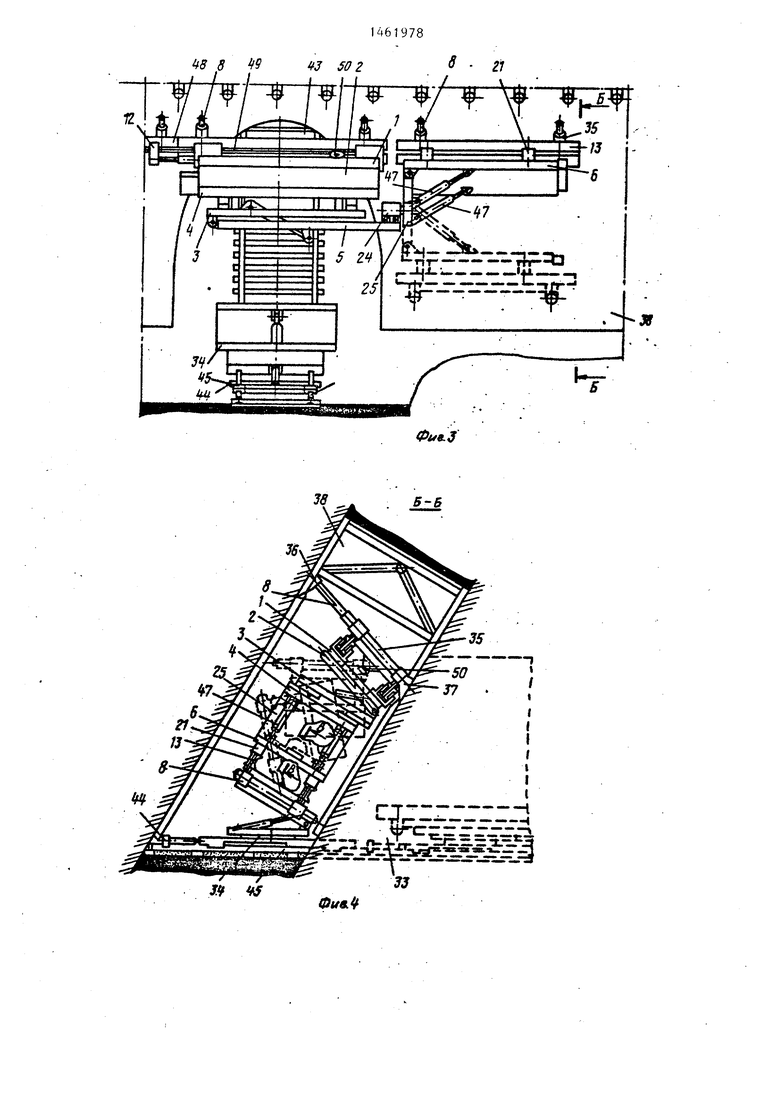
Для монтажа звеньев направляющих (фиг, 3 и 4), по которым передвигается монтажный станок 1, его проме5 жуточная рама 5 снабжается поворотным устройством 24 с поворотным кронштейном 25, на котором шарнирно закреплена верхняя телескопическая рама 6. Поворотное устройство 24
0 (фиг. 5 и 6), закрепляемое на промежуточной раме 5, состоит из корпуса 26, внутри которого вставлены ползун 27 с цевочным зацеплением и контактирующее с ним зубчатое коле5 со 28 в жестко закрепленных опорных втулках 29. На конец вала зубчатого колеса 28 надевается поворотный кронштейн 25, закрепляемый жестко гайкой 30 со стопорным шплинтом 31.
0 Поворот кронштейна 25 осуществляется зубчатым колесом 28 при поступательном движении ползуна 27 от связанного с ним силового гидроцилинд- ра 32 на промежуточной раме 5.
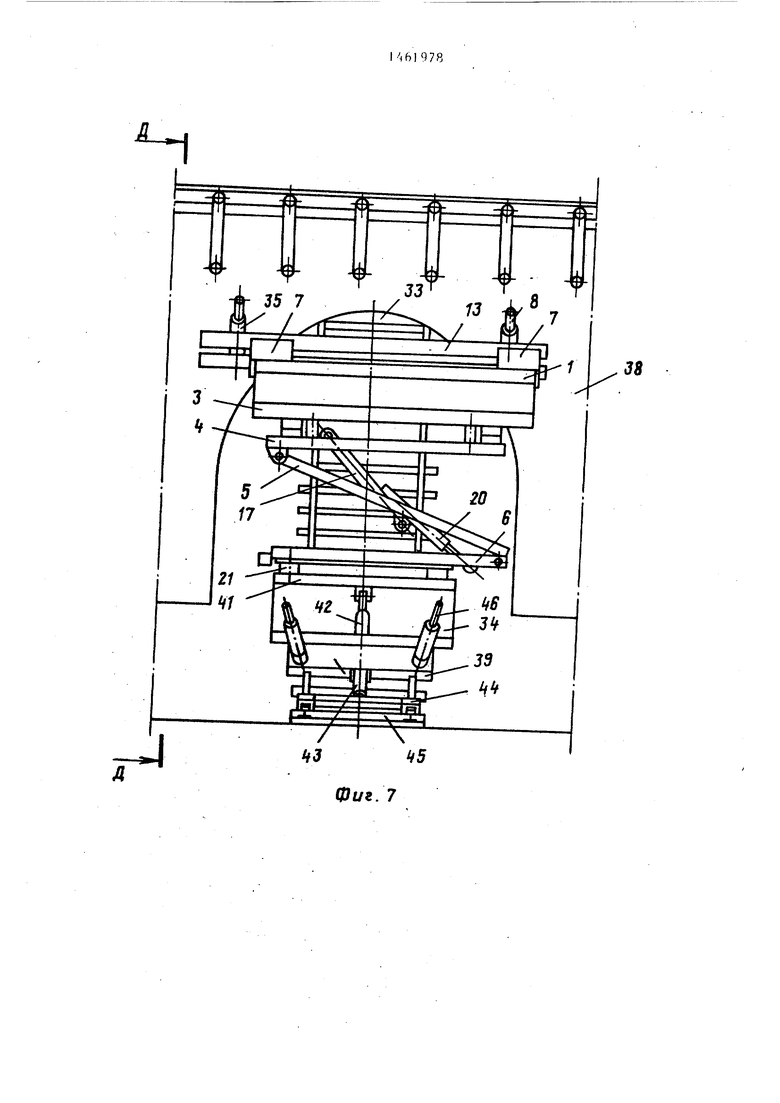
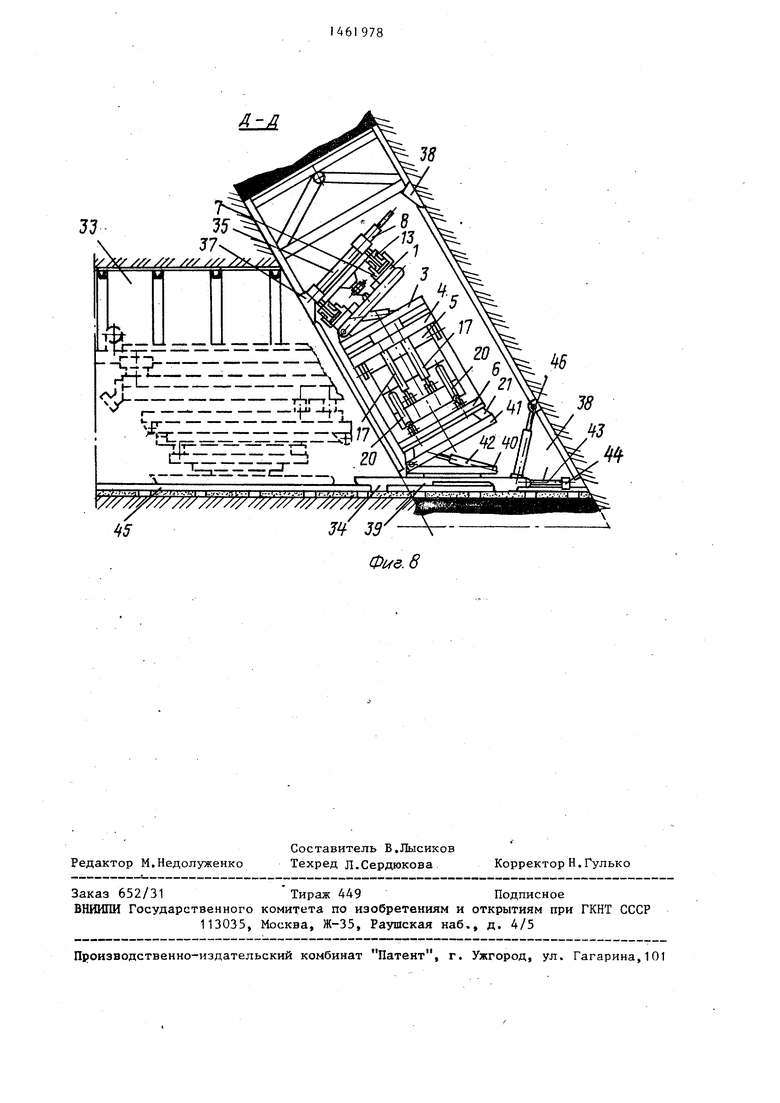
Монтаж механизированной крепи производится после монтажа монтажного оборудования (монтажного станка и звеньев направляющих), Монтажный станок 1 (фиг. 7 и 8), доставленный в квершлаг 33 на грузовой платформе перегрузочным устройством (не пока- заны) укладывается и крепится захватами 21 на поворотную платформу 34 верхней телескопической рамой 6, а
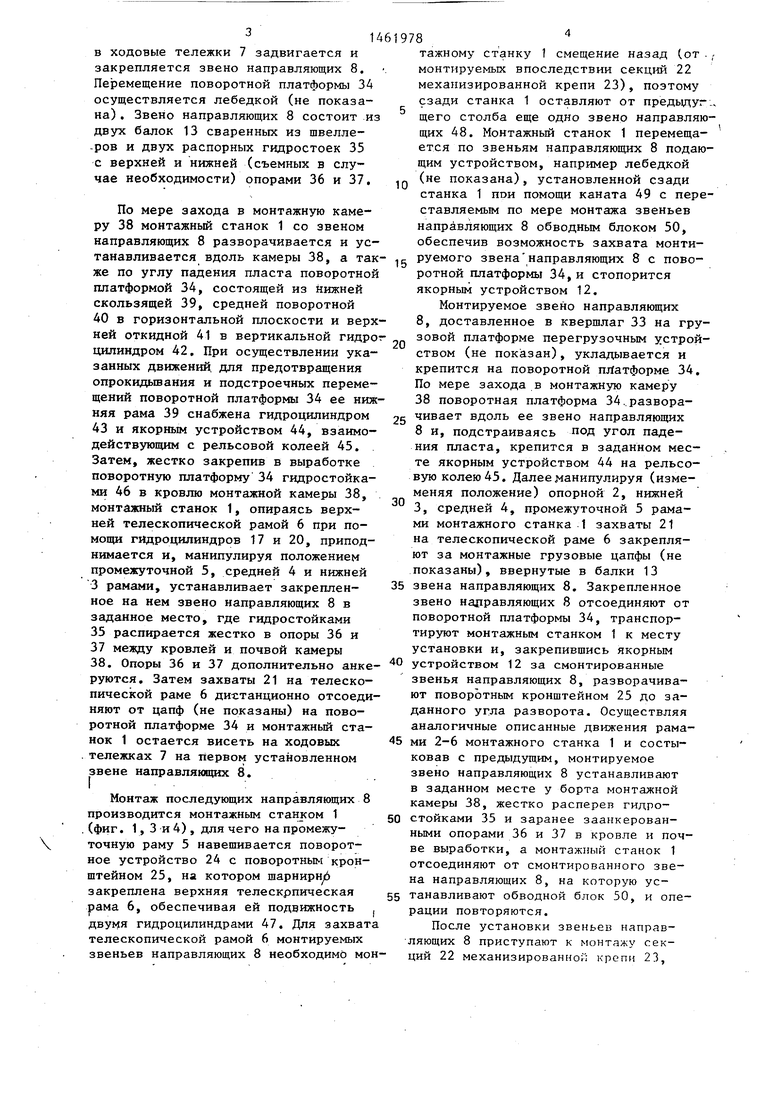
в ходовые тележки 7 задвигается и закрепляется звено направляющих 8. Перемещение поворотной платформы 34 осуществляется лебедкой (не показана) , Звено направляющих 8 состоит из двух балок 13 сваренных из швелле- -ров и двух распорных гидростоек 35 с верхней и нижней (съемных в случае необходимости) опорами 36 и 37,
По мере захода в монтажную камеру 38 монтажный станок 1 со звеном направляющих 8 разворачивается и устанавливается вдоль камеры 38, а так же по углу падения пласта поворотной платформой 34, состоящей из йижней скользящей 39, средней поворотной 40 в горизонтальной плоскости и верхней откидной 41 в вертикальной гидро цилиндром 42. При осуществлении указанных движений, для предотвращения опрокидьшания и подстроечных перемещений поворотной платформы 34 ее нижняя рама 39 снабжена гидроцилиндром 43 и якорным устройством 44, взаимодействующим с рельсовой колеей 45. Затем, жестко закрепив в выработке поворотную платформу 34 гидростойками 46 в кровлю монтажной камеры 38, монтажный станок 1, опираясь верхней телескопической рамой 6 при помощи гидроцилиндров 17 и 20, приподнимается и, манипулируя положением промежуточной 5, средней 4 и нижней 3 рамами, устанавливает закрепленное на нем звено направляющих 8 в заданное место, где гидростойками 35 распирается жестко в опоры 36 и 37 между кровлей и почвой камеры 38. Опоры 36 и 37 дополнительно анке руются. Затем захваты 21 на телескопической раме 6 ди1:танционно отсоединяют от цапф (не показаны) на поворотной платформе 34 и монтажный станок 1 остается висеть на ходовых тележках 7 на первом установленном звене направлякхцих 8.
Монтаж последующих направляющих 8 производится монтажным станком 1 .(фиг. 1, 3 и 4) , для чего на промежу- точную раму 5 навешивается поворотное устройство 24 с поворотным кронштейном 25, на котором шарнирн закреплена верхняя телескрпическая рама 6, обеспечивая ей подвижность двумя гидроцилиндрами 47. Для захвата телескопической рамой 6 монтируемых звеньев направляющих 8 необходимо мон10
0
5
,с
тажному станку 1 смещение назад (от . - монтируемых впоследствии секций 22 механизированной крепи 23), позтому сзади станка 1 оставляют от предыдуг:, щего столба еще одно звено направляющих 48. Монтажный станок 1 перемеща- ется по звеньям направляющих 8 подающим устройством, например лебедкой (не показана), установленной сзади станка 1 пои помощи каната 49 с переставляемым по мере монтажа звеньев направляющих 8 обводным блоком 50, обеспечив возможность захвата монтируемого звена направляющих 8 с поворотной платформы 34,и стопорится якорным устройством 12.
Монтируемое звено направляющих 8, доставленное в квершлаг 33 на грузовой платформе перегрузочным устройством (не показан), укладывается и крепится на поворотной платформе 34. По мере захода в монтажную камеру 38 поворотная платформа 34,разворачивает вдоль ее звено направляющих 8 и, подстраиваясь под угол падения пласта, крепится в заданном месте якорным устройством 44 на рельсовую колею 45. Далее манипулируя (изме- меняя положение) опорной 2, нижней 3, средней 4, промежуточной 5 рамами монтажного станка 1 захваты 21 на телескопической раме 6 закрепляют за монтажные грузовые цапфы (не показаны), ввернутые в балки 13 5 звена направляющих 8. Закрепленное звено на11равляющих 8 отсоединяют от поворотной платформы 34, транспортируют монтажным станком 1 к месту установки и, закрепившись якорным 0 устройством 12 за смонтированные звенья направляющих 8, разворачивают поворотным кронштейном 25 до заданного угла разворота. Осуществляя аналогичные описанные движения рама- 5 ми 2-6 монтажного станка 1 и состыковав с предыдущим, монтируемое звено направляющих 8 устанавливают в заданном месте у борта монтажной камеры 38, жестко расперев гидро- 0 стойками 35 и заранее зааикерован- ными опорами 36 и 37 в кровле и почве выработки, а монтажный станок 1 отсоединяют от смонтированного звена направляющих 8, на которую ус- 5 танавливают обводной блок 50, и операции повторяются.
После установки звеньев направ- ляющих 8 приступают к монтажу секций 22 механизированно; ; кропи 23,
0
которые монтируют в монтажную канаву 51, проходимую на БВР заходками (фиг. 1,2 и 9). Секция 22 механизированной крепи 23, доставленная на грузовой платформе в квершлаг 33, перегрузочным устройством (не показаны) снимается, устанавливается и крепится на поворотной платформе 34. По мере захода в монтажную камеру 38 поворотная платформа 34 разворачивает вдоль ее монтируемую секцию 22 механизированной крепи 23 и, подстраиваясь под угол падения пласта, крепится в заданном месте на сопряжении якорным устройством 44 за рельсовую колею 45.
Монтажный станок 1, перемещаясь лебедкой (не показана), останавлива- ется над монтируемой секцией 22 и крепится якорным устройством 12 к звену направляющих 8. Осуществляя подстроечные движения рамами 2-6 , станка 1 (шесть возможных движений), соединяют станок 1 захватами 21 на 1«лескопической раме 6 за монтажные грузовые цапфы (не показаны) секций 22 крепи 23, ввернутые в основание 52 и перекрытие 53;. Захватив таким образом монтируемую секцию 22, монтажный станок 1 лебедкой перемещается вместе с секцией 22 к месту ее установки в камере. В этом месте станок 1 крепится якорным устройством 12 на звено направляющих 8. Осуществляя подстроечные движения рамами 2-6 монтажного станка 1 (продольная подача, смещение по мощнасти пласта, разворот по углу падения пласта, разворот в плоскости пласта, точное продольное перемещение гидроцилинд- ром 11 станка 1 - и глубина установки) , монтируемую секцию 22 механизированной крепи 23 опускают в монтажную камеру 51, распирают в кровлю и в почву пласта и отсоединяют захваты 21 от секции 22.
14619786
Следующие монтируемые секции 22 устанавливают указанным методом и соединяют между собой соединительными звеньями. Управление монтажным станком 1 - дистанционное (фиг. 1) с выносного пульта 54 управления, что гарантирует безопасность ведения работ.
1Q Предлагаемый станок для монтажа механизированной крепи можно использовать и при ее демонтаже. Демонтаж производится в обратном порядке.
15 Формула изобретения
1. Станок для монтажа и демонтажа механизированной крепи, включающий платформу, которая имеет ходо2Q вые тележки для перемещения по рельсовым направляющим с якорным механизмом для стопорения и связанные с ней установленные друг над другом шарнир- но связанные кинематическими парами
25 и гидродомкратами поворота нижнюю, среднюю и верхнюю рамы, последняя из которых имеет захваты для секций крепи, отличающийся тем, что, с целью повышения эффективности монтажных работ при различных технологических схемах выемки, он снабжен установленной между средней и верхней рамами и шарнирно связанной с ними промежуточной поворотной . рамой, при этом средняя и верхняя
35 рамы дополнительно связаны с промежуточной поворотной рамой в средней части посредством гидроцилиндров с возможностью изменения угла наклона одной рамы относительно другой.
30
40
45
2. Станок по п. 1, отличающийся тем, что промежуточная поворотная рама снабжена поворотным кронштейном, к которому шарнирно зацеплена верхняя телескопическая рама.
Формула изобретения
1. Станок для монтажа и демонтажа механизированной крепи, включающий платформу, которая имеет ходовые тележки для перемещения по рельсовым направляющим с якорным механизмом для стопорения и связанные с ней установленные друг над другом шарнир- но связанные кинематическими парами
и гидродомкратами поворота нижнюю, среднюю и верхнюю рамы, последняя из которых имеет захваты для секций крепи, отличающийся тем, что, с целью повышения эффективности монтажных работ при различных технологических схемах выемки, он снабжен установленной между средней и верхней рамами и шарнирно связанной с ними промежуточной поворотной . рамой, при этом средняя и верхняя
рамы дополнительно связаны с промеуточной поворотной рамой в средней асти посредством гидроцилиндров с возможностью изменения угла наклона одной рамы относительно другой.
45
2. Станок по п. 1, отличающийся тем, что промежуточная поворотная рама снабжена поворотным кронштейном, к которому шарнирно зацеплена верхняя телескопическая рама.
l.J.
l
... /5
i ---7tjs-i i
7J
...
J(
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ механизированного монтажа крепи на крутых пластах | 1987 |
|
SU1553698A1 |
| Опорно-поворотное устройство для горной машины | 1979 |
|
SU859645A1 |
| Станок для монтажа и демонтажа механизированных крепей | 1976 |
|
SU767353A1 |
| Станок для монтажа секций механизированной крепи и конвейера | 1982 |
|
SU1084455A1 |
| Станок для монтажа и демонтажа механизированных крепей | 1984 |
|
SU1188330A1 |
| Станок для монтажа секций механизированной крепи и конвейера | 1990 |
|
SU1774998A3 |
| КРЕПЬ СОПРЯЖЕНИЯ | 1992 |
|
RU2072050C1 |
| Устройство для монтажно-демонтажных работ в горной выработке | 1990 |
|
SU1719653A1 |
| Механизированный комплекс для крутых пластов | 1981 |
|
SU1132793A3 |
| ГОРНОПРОХОДЧЕСКИЙ ДОБЫЧНОЙ БЛОК (МОДУЛЬ) | 2013 |
|
RU2528350C2 |


Изобретение относитс я к горно- добьшающей промьшленности и м.б; использовано при монтаже - демонтаже механизированной крепи. Цель - повышение эффективности монтажных работ. Станок состоит из платформы и установленных одна над другой рам () 2-6. Платформа имеет ходовые тележки для перемещения по направляющим 8. Рамы связаны кинематическими парами и годродомкратами поворота. Верхняя Р 6 имеет захваты 21 для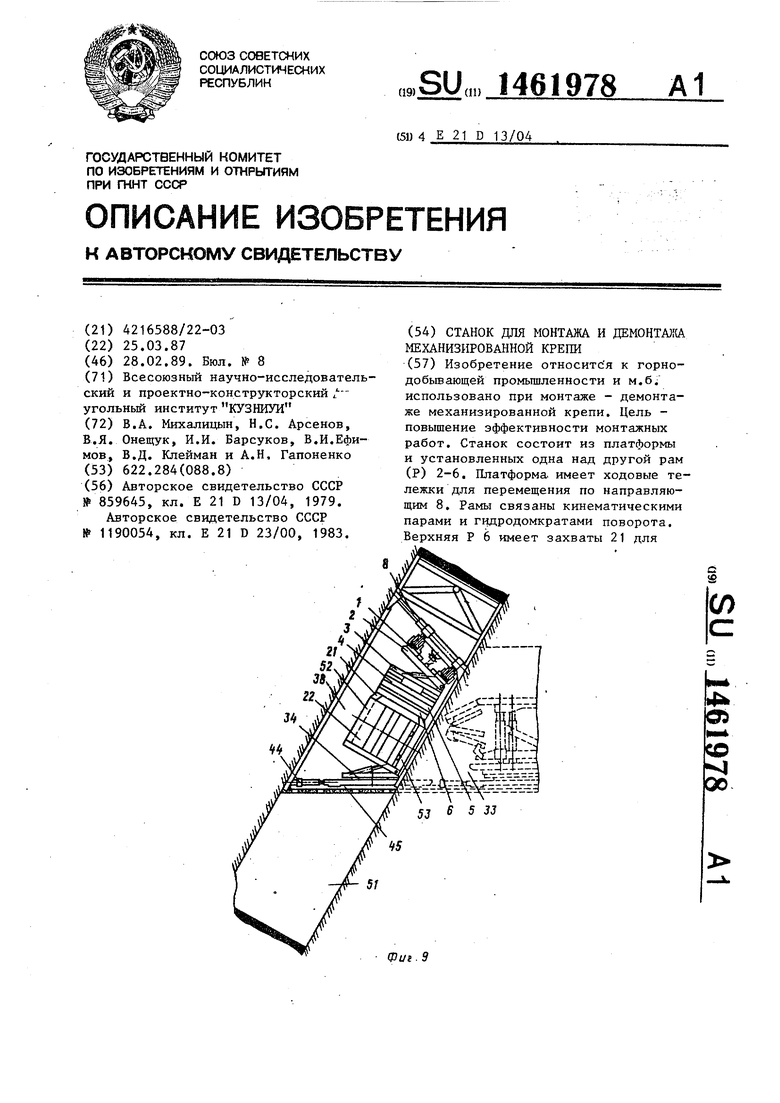
Х)-х
го
ks
53
51
.j
Фиг. 2
«(У 8 S
- rv.lJ J
3
0tfe.tf
Б-В
35
so
J7 . /
lJ
ззг
-g.
(ПоверН(/то} 26 fV
28
is
Фие.б
52
-7 s
ue.S
Г Г
26
Фиг 7
A:LS.
34 39
J8
.6
| Опорно-поворотное устройство для горной машины | 1979 |
|
SU859645A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Авторское свидетельство СССР № 1190054, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
