Изобретение относится к горному делу, в частности к технологии монтажных работ при разработке крутых пластов.
Цель изобретения - повышение производительности монтажных работ за счет получения возможности корректировки положения секций крепи при монтаже и повышение работоспособности штрековой крепи за счет исключения дополнительной нагрузки.
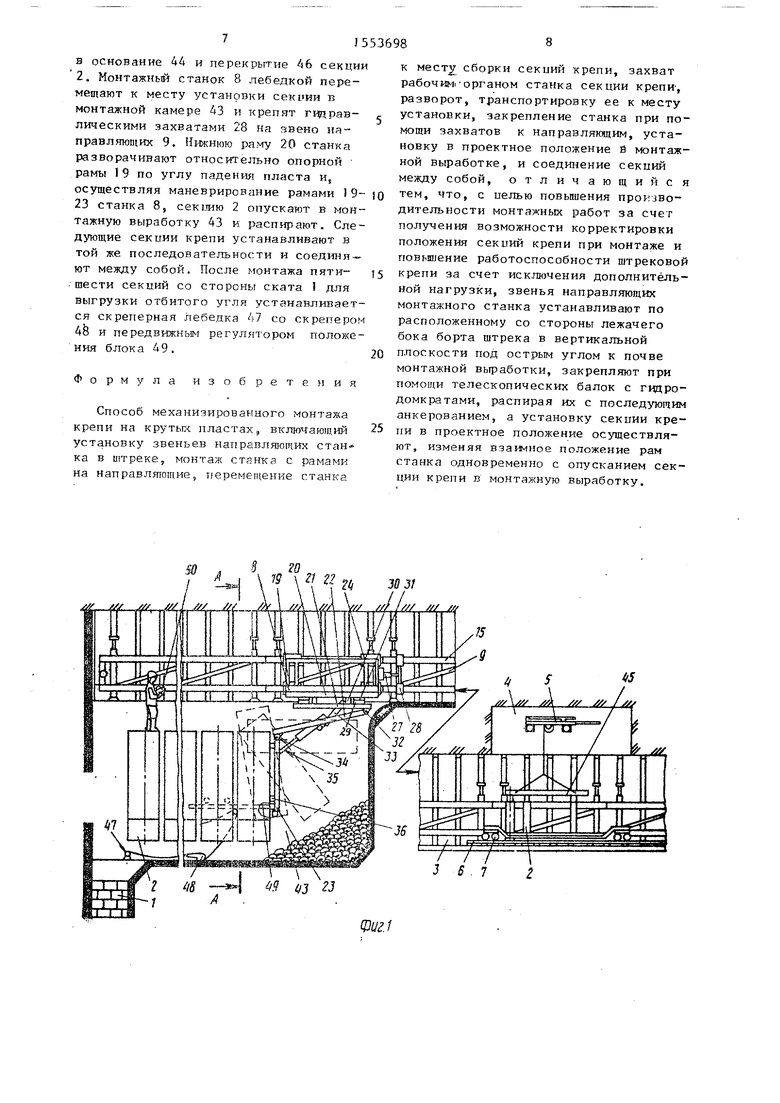
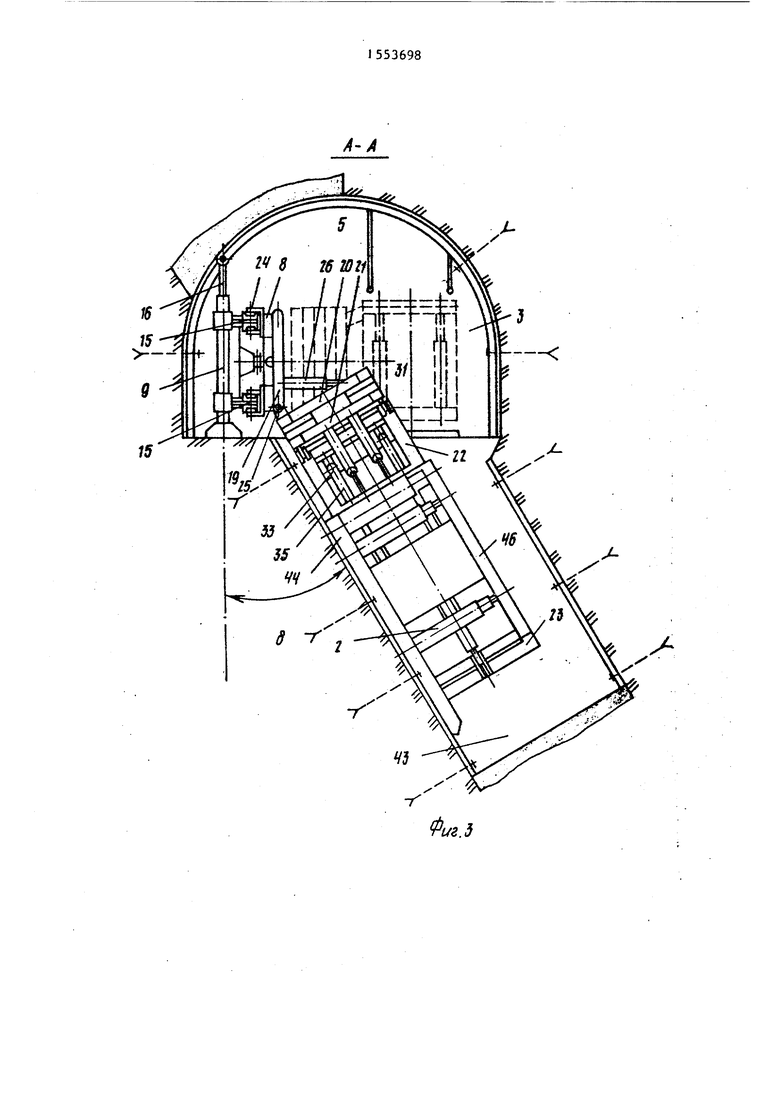
На Лиг1.1 показана расстановка оборудования при монтаже очистного агрегата типа АНЩ; на фиг,2 - монтаж первого звена направляющих и монтажного станка; на Лиг.З - разрез А-А на
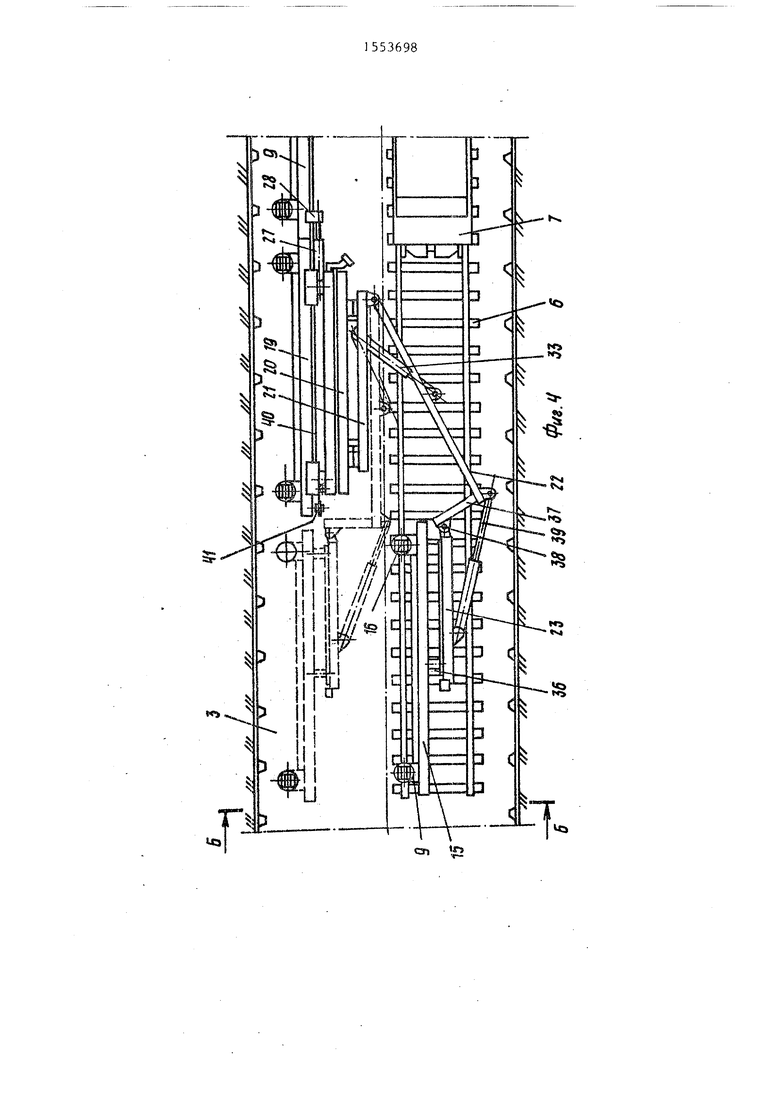
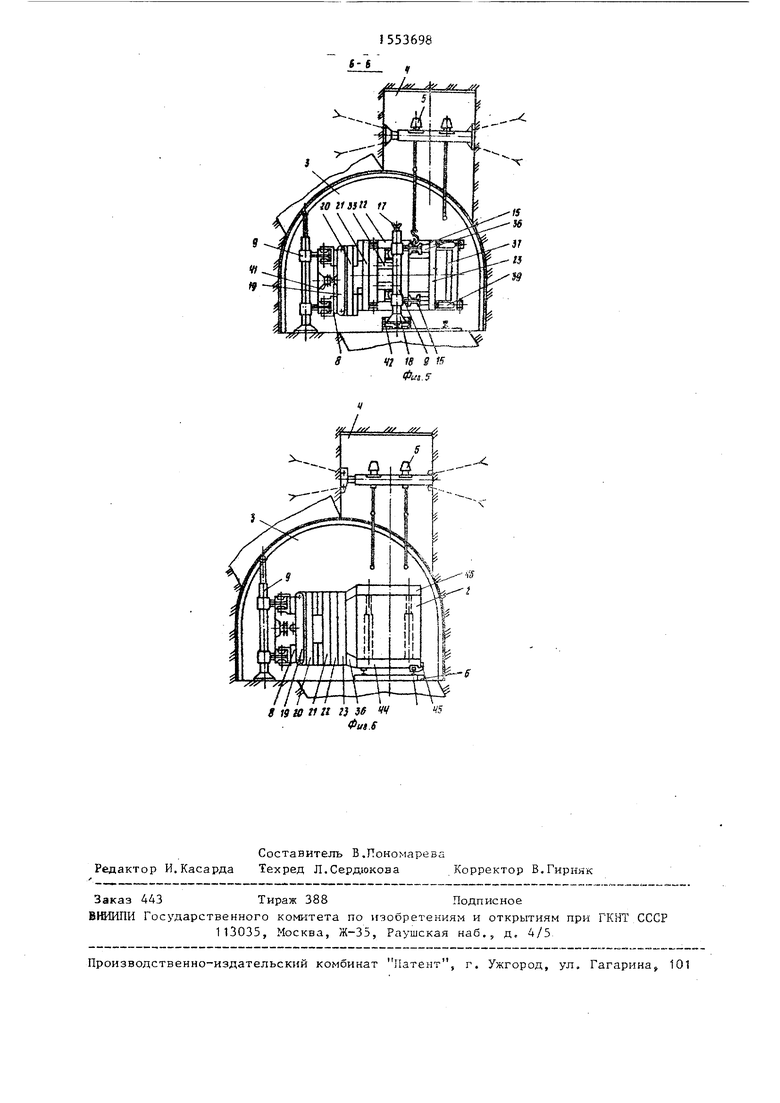
(bHt1.1 ; на Фиг.4 - монтаж звеньев направляющих монтажным станком; на фиг.5 - разрез Б-Б на фиг.4; на фиг.6 - захват станком монтируемой секции крепи. В кровле штрека 3 проходят нишу 4, в которой монтируют перегрузочное устройство 5, За нишей 4 штрек 3 оборудуется рельсовой колеей 6 для проезда платформы 7. Монгаж монтажного станка 8 на звено направляющих 9 производится следующим образом.
Перегрузочным устройством 5 на колею 6 укладывается монтажный станрк 8 на поворотную платЛорку 10, состоящую из нижней рамы 1 и верхней рамы 12, которая поворачивается на 100 гидроцилиндром 13, При повороте рамы 12 платформа 10 крепится рамой 11 к
5
5
д
,„
,,.
колее 6 захватами 14. Первой монтируемое чвено направляющих 9 доставляется по штреку 3 к монтажному станку 8, Звено направляющих состоит из двух балок 15, сваренных из швеллеров, и двух распорных гидростоек 16 с верхней и нижней опорами 17 и J8 соответственно. Монтажный станок включает опорную 19, нижнюю 20, среднюю 21, дополнительную промежуточную 22 и телескопическую 23 рамы. Опорная рама 19 шеет ходовые тележки 24 для перемещения по звеньям направляющих 9 и соединена с боковой стороны посредством шарниров 25, а с другой - посредством- гидроцилиндров 26, обеспечивающих возможность изменения угла наклона нижней рамы 20 относительно опорной рамы J9 в зависимости от угла падения пласта от 35 цо 90 . На опорной раме 39 закреплен гидроиилиндр 27 продольной подачи, связанный с якор- ньм устройством 28, взаимодействующий с балками 35 звеньев направляющих 9. Нижняя рама 20 соединена со средней рамой 21 механизмом 29 поперечной подачи, состоящим из гидроцилиндров 30 и направляющих 31. Средняя рама 21 соединена с промежуточной рамой 22 шарнирами 32 и поворотными гидроии- линдрами 33. Телескопическая рама 23 соединена с промежуточной рамой 22 также шарнирами 34 и поворотными гид- роиилиндрами 35 и имеет захваты 36 для установки и крепления монтажного
станка 8 на поворотной платформе 10, звена направляющих 9, секций крепи 2.
Первое монтируемое звено направ- „ ляющих 9 при помощи перегрузочного устройства 5 заводится балками 15 в ходовые тележки 24 и закрепляется в них. Монтажный станок 8 со звеном направляющих 9 разворачивается на 90е
верхней рамой 12 поворотной платйюрмы 10 балок 15 подвешенного звена натрав- 10 при помощи гидроцилиндра 13 и, ма- ляющих 9. Закрепляют захваты 36 за нипулируя телескопической 23, промежуточной 22, средней 21 и нижней 20 рамами, устанавливают звено направ15
ляющих 9 под углом к почве штрека 3 у его борта в заданном месте. Гидростойки 16 распираются жестко опорами 17 и 18 между почвой и рамным креплением штрека 3 и дополнительно анкеру- ются.
Для захвата телескопической рамой 23 последующих звеньев направляющих 9 над нишей 4 монтажному станку 8 необходимо смещение, для чего перед первым звеном смонтированной направляющей 9 монтируют еще одно звено. Для этого станок 8 на поворотной / платформе 10 перемещают назад до выхода ходовых тележек 24 из балок 15
20
цапфы балок 15. Произведя захват и отсоединившись от перегрузочного устройства 5, станок 8 поднимает мон тируемое звено направляющих, перемещает его к месту установки и, закре пившись якорным устройством 28 к смонтированным звеньям направляющих 9, осуществляет подстроечные движени рамами, состыковывает звено с предыдущим и устанавливает его в заданном месте у борта штрека 3. Установленное звено направляющих 9 гидростойка ми 16 распирают через опоры 17 и 18 25 между почвой и рамным креплением. Опоры дополнительно анкеруются. Затем монтажный станок 8 отсоединяют от смонтированного звена направляющи 9, устанавливают переставляемый обцапфы балок 15. Произведя захват и отсоединившись от перегрузочного устройства 5, станок 8 поднимает монтируемое звено направляющих, перемещает его к месту установки и, закрепившись якорным устройством 28 к смонтированным звеньям направляющих 9, осуществляет подстроечные движения рамами, состыковывает звено с предыдущим и устанавливает его в заданном месте у борта штрека 3. Установленное звено направляющих 9 гидростойками 16 распирают через опоры 17 и 18 25 между почвой и рамным креплением. Опоры дополнительно анкеруются. Затем монтажный станок 8 отсоединяют от смонтированного звена направляющих 9, устанавливают переставляемый обпервого звена направляющих 9, повора- 30 водной блок 41 и операции повторяют- чивают верхней рамой 12 в прежнее по- ся.
ложение, передвигают под нишу 4 и за- Таким образом монтируются направ- водят в ходовые тележки 24 второе ляющие вдоль всей монтажной выоаботки звено направляющих 9 перегрузочным 43. Причем звенья направляющих 9 по устройством 5. Сместив поворотную ра- , осям распорных гидростоек 16 устанав- му 10 назад, верхнюю раму J2 отводят ливают под острым углом 8 к почве; на 90 и монтажным станком монтируют монтажной выработки 43, что обеспечи второе звено направляющих, состыковав вает возможность регулировки полоке- его с первым. Затем захваты 36 на те- Ния секции 2 крепи при ее установке- лескопической раме 23 отсоединяют 0 по углу падения пласта. от цапф на поворотной платформе 10 и у После монтажа звеньев направляю- оставляют станок 8 на втором установ- ЩИх 9 приступают к монтажу секции 2 ленном звене направляющих 9.крепи. Проведение монтажной камеры 43
Монтаж последующих звеньев налрав- производят заходками. Секцию крепи ляющих 9 производится монтажньм стан 45 на платформе 7 доставляют в штрек 3 к ком 8, для чего он снабжается допол- ниие 4 снимают и устанавливают оснонительной проставкой 37, жестко закрепленной к промежуточной раме 22 и шарниром 38 - к телескопической раме
ванием 44 на колею 6, Монтажный
станок 8 устанавливают напротив сек„„„ции 2 и крепят гидравлическими захва23, обеспечивая ей подвижность .гвдро- CQ n n
onJV тами 28 к звену направляющих 9. Для
цилиндрами ЗУ.
предотвращения произвольного смещения
при захвате монтажным станком 8 секМонтажный станок 8 перемещается по звеньям направляющих 9.лебедкой, установленной в щтреке 3, при помощи каната 40 с переставляемым обводным блоком 41 и стопорится якорным устройством 28, обеспечивая возможность захвата доставленного на платАорме 7 звена направляющих 9, подвешенного на
55
цию 2 по торцам основания 44 крепят к рельсу колеи быстросъемными упорами 45. Осуществляя необходимые движения рамами станка 8, закрепляют зах4- ваты 36 на телескопической раме 23 за монтажные грузовые цапАы, ввернутые
перегрузочном устройстве 5 за балки 15 и опирающегося для предотвращения смещения в быстросъемные упорные стаканы 42 на колее 6 нижними опорами 18 двух гидростоек 16.
Развернув промежуточную paMv 22 гидроцилиндрами 33, заводят телескопическую раму 23 станка 8 со стороны
балок 15 подвешенного звена натрав- ляющих 9. Закрепляют захваты 36 за
цапфы балок 15. Произведя захват и отсоединившись от перегрузочного устройства 5, станок 8 поднимает монтируемое звено направляющих, перемещает его к месту установки и, закрепившись якорным устройством 28 к смонтированным звеньям направляющих 9, осуществляет подстроечные движения рамами, состыковывает звено с предыдущим и устанавливает его в заданном месте у борта штрека 3. Установленное звено направляющих 9 гидростойками 16 распирают через опоры 17 и 18 между почвой и рамным креплением. Опоры дополнительно анкеруются. Затем монтажный станок 8 отсоединяют от смонтированного звена направляющих 9, устанавливают переставляемый обводной блок 41 и операции повторяют- ся.
ванием 44 на колею 6, Монтажный
цию 2 по торцам основания 44 крепят к рельсу колеи быстросъемными упорами 45. Осуществляя необходимые движения рамами станка 8, закрепляют зах4- ваты 36 на телескопической раме 23 за монтажные грузовые цапАы, ввернутые
7J5
в основание 44 и перекрытие 46 секции 2„ Монтажный станок 8 лебедкой перемещают к месту установки секиии в монтажной камере 43 и крепят гидрав- лическими захватами 28 на звено направляющих 9. Нижнюю раму 20 станка разворачивают относительно опорной рамы 19 по углу падения пласта и, осуществляя маневрирование рамами i 9- 23 станка 8, секцию 2 опускают в монтажную выработку 43 и распирают. Следующие секиии крепи устанавливают в той же последовательности и соединяют между собой. После монтажа пяти- шести секций со стороны ската 1 для выгрузки отбитого угля устанавливается скреперная лебедка -7 со скрепером 4& и передвижным регулятором положения блока 49.
Формула изобретения
Способ механизированного монтажа крепи на крутых пластах, включающий установку звеньев направляющих стан ка в штреке, монтаж станка с рамами на направляющие, перемещение станка
8
5
0
5
к местл/ сборки секций крепи, захват рабочимгорганом станка секции крепи-, разворот, транспортировку ее к месту установки, закрепление станка при помощи захватов к направляющим, установку в проектное положение в монтажной выработке, и соединение секций между собой, отлич ающийс я тем, что, с пелью повышения производительности монтажных работ за счет получения возможности корректировки положения секций крепи при монтаже и повышение работоспособности штрековой крепи за счет исключения дополнительной нагрузки, звенья направляющих монтажного станка устанавливают по расположенному со стороны лежачего бока борта штрека в вертикальной плоскости под острым углом к почве монтажной выработки, закрепляют при помощи телескопических балок с гидродомкратами, распирая их с последующим анкерованием, а установку секции крепи в проектное положение осуществляют, изменяя взаимное положение рам станка одновременно с опусканием секции крепи в монтажную выработку.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для монтажа и демонтажа механизированной крепи | 1987 |
|
SU1461978A1 |
| Способ монтажа механизированного комплекса монтажным станком | 1990 |
|
SU1765446A1 |
| Станок для монтажа и демонтажа механизированных крепей | 1976 |
|
SU767353A1 |
| Станок для монтажа секций механизированной крепи и конвейера | 1982 |
|
SU1084455A1 |
| Станок для монтажа секций механизированной крепи и конвейера | 1990 |
|
SU1774998A3 |
| Устройство для монтажно-демонтажных работ в горной выработке | 1990 |
|
SU1719653A1 |
| Способ монтажа механизированного комплекса монтажным станком | 1985 |
|
SU1326736A1 |
| Агрегатированная механизированная крепь | 1989 |
|
SU1739046A1 |
| Способ монтажа механизированной цепи очистного комплекса | 1990 |
|
SU1767192A1 |
| Способ крепления диагонального забоя и щитовая крепь для его осуществления | 1982 |
|
SU1244335A1 |
Изобретение относится к технологии монтажных работ при разработке крутых пластов полезного ископаемого. Цель - повышение производительности монтажных работ за счет возможности корректирования положения секций крепи. Изобретение позволяет также повысить работоспособность штрековой крепи за счет исключения дополнительной нагрузки. Для этого в кровле штрека (Ш) 3 проходят нишу, в которой монтируют перегрузочное устройство (ПУ) 5. При помощи ПУ 5 монтажный станок (МС) 8 устанавливается на платформе 10. Состоит МС 8 из опорной 19, нижней 20, средней 21, промежуточной 22 и телескопической 23 рам (Р). Все Р соединены гидроцилиндрами и шарнирами. В ходе монтажа крепи МС 8 со звеном направляющих 9 поворачивается при помощи гидроцилиндров. В ходе манипуляций Р 20 - 23 устанавливают у борта Ш 3 под углом, после чего укрепляют Ш 3 при помощи гидростоек 16, распираемых между почвой и рамным креплением Ш 3, и анкеруют. Затем перед первым звеном направляющих 9 монтируют второе звено направляющих 9, производя манипуляции Р 19, 23. Монтаж последующих звеньев направляющих 9 осуществляется при помощи МС 8, перемещаемого по звеньям направляющих 9 при помощи каната 40. Таким образом, монтируется весь путь для МС 8. После монтажа пути производят монтаж секций крепи. Для этого монтажную камеру проводят заходками. При этом секции крепи доставляют в Ш 3 к нише 4. Напротив секций устанавливают МС и крепят захватами к звеньям направляющих 9. Осуществляя движения, р захватывает МС 8 секции, перемещает по звеньям направляющих. При помощи маневрирования рамами Р 19 - 23 секции 2 крепи опускают в монтажную камеру и расширяют. Следующие секции устанавливают в той же последовательности и соединяют между собой. После монтажа пяти-шести секций со стороны ската устанавливается скреперная лебедка для выгрузки отбитого угля. 6 ил.
НО
l Ц U 383
у/ ///////. ///. /у
II/,
itS
L
15
/
/
J
Фиг. 5
«О
сзп Ј2
6-6
8 19 № Я П 3 36 W
42 W В V
Физ У
.Х,
| Технология и безопасность работ при демонтаже, монтаже и эксплуатации агрегатов 1AFI, М., 1977, с | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ возведения рамной крепи при проведении выработки с помощью комбайнового комплекса | 1977 |
|
SU1071756A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Авторское свидетельство СССР Я 1190054, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
