00 00
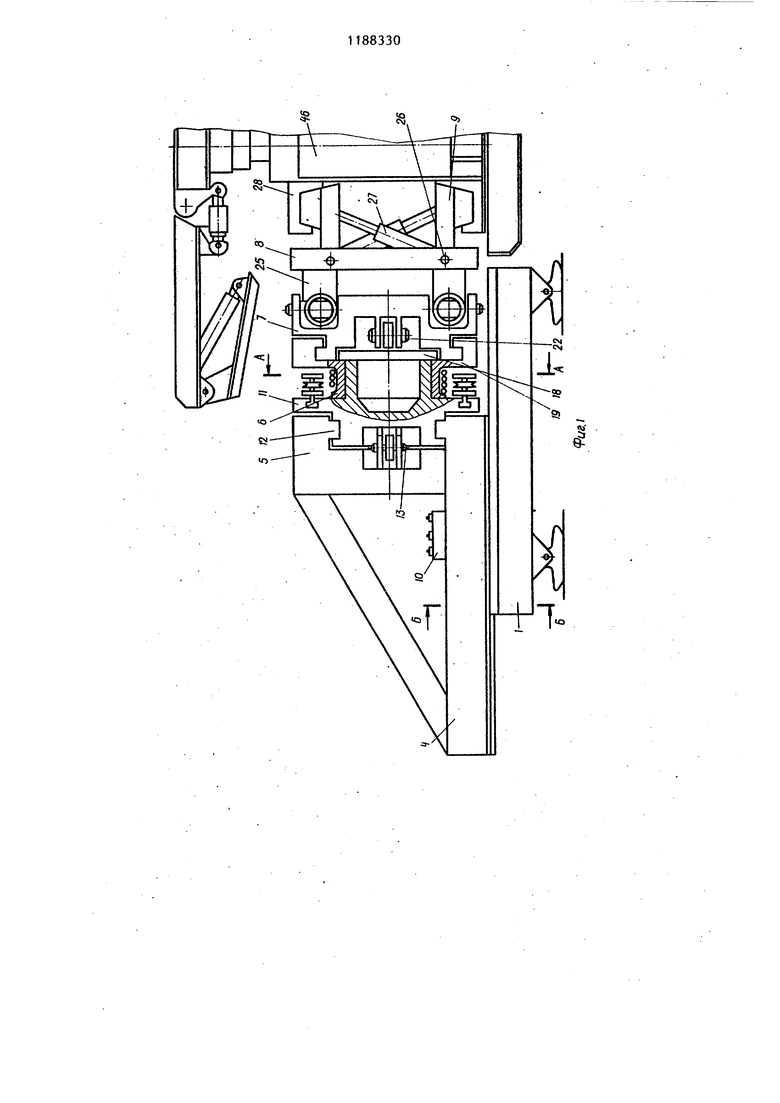
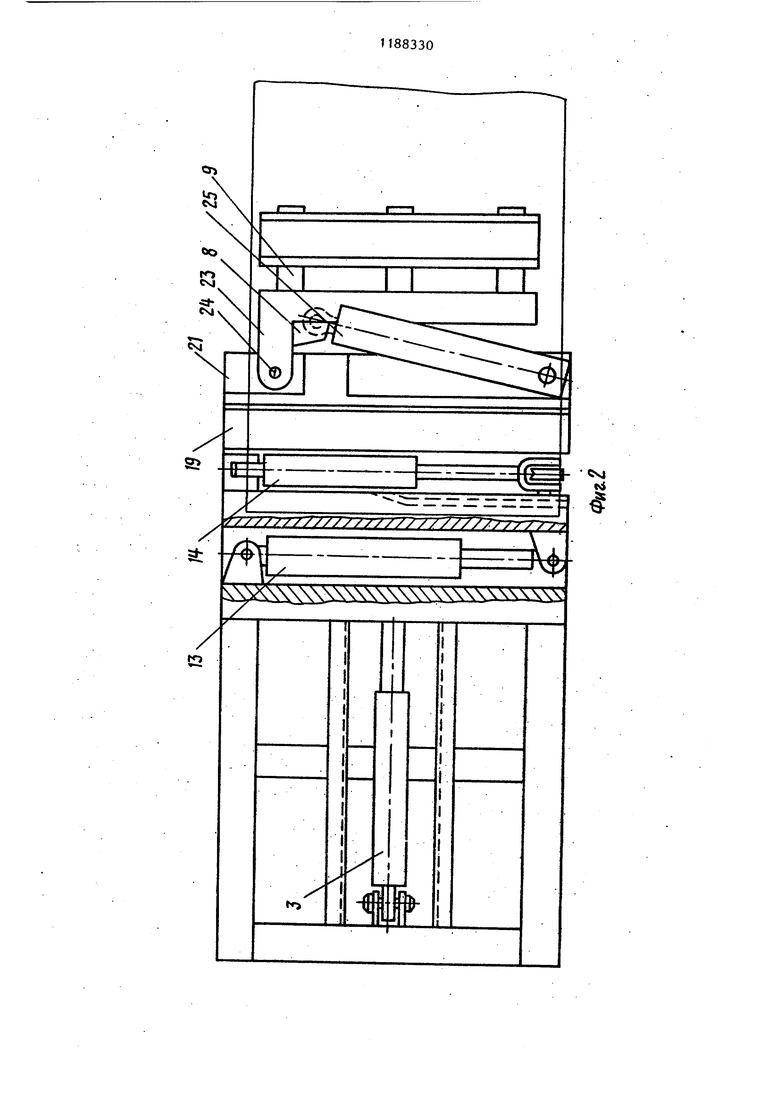
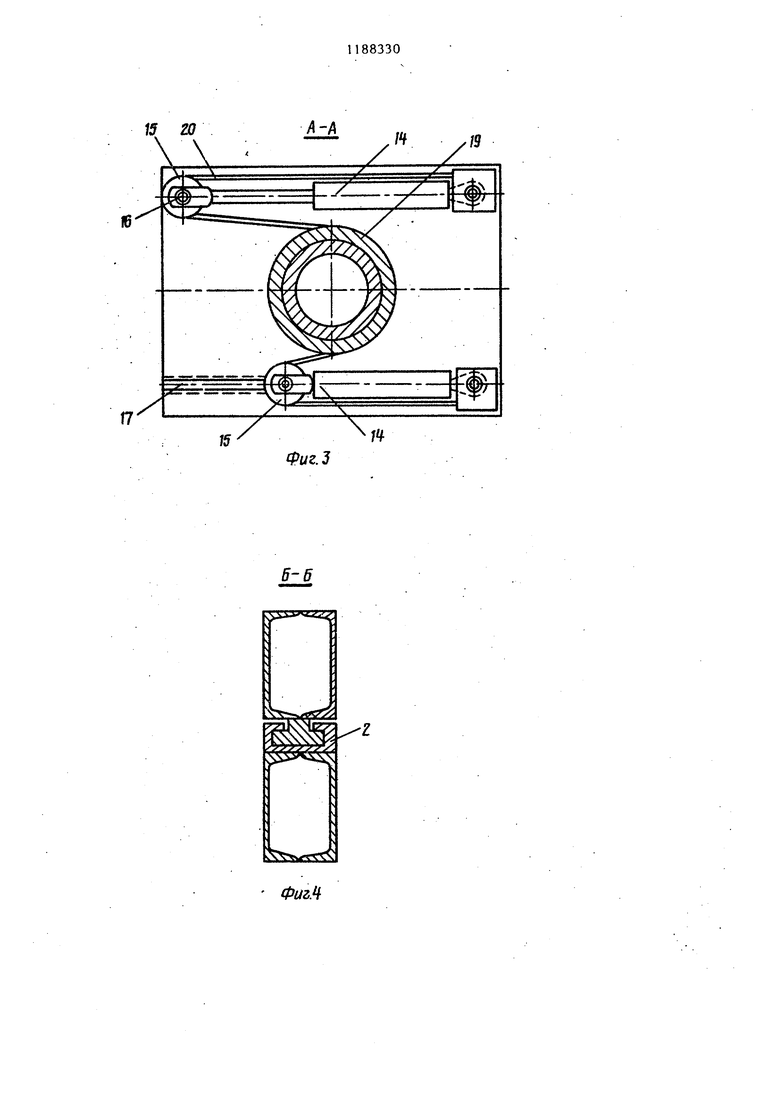
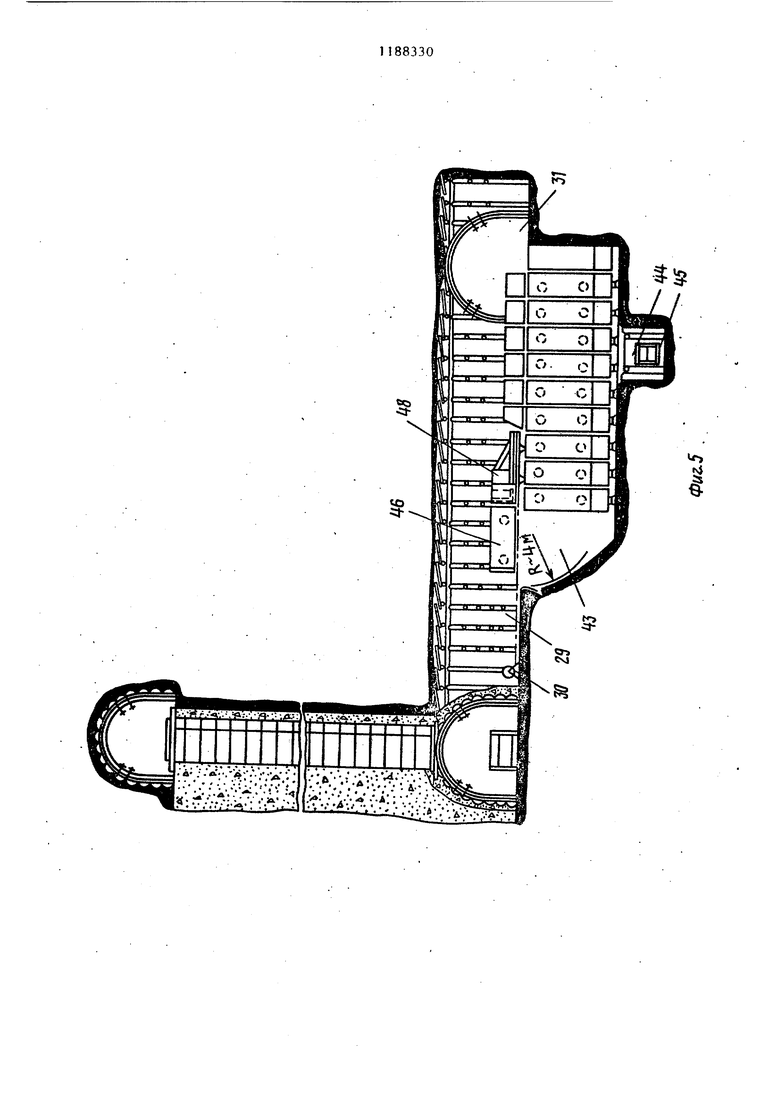
со 00 Изобретение относится к угольной промьшшенности, в частности к оборудованию монтажа и демонтажа и сред ствам доставки очистных механизированных комплексов в забое. Целью изобретения является повышение маневренности станка. На фиг. 1 изображен монтажный станокJ на фиг. 2 - то же, вид сверху, на фиг. 3 - разрез А-А на фиг.1 на фиг. 4 - разрез Б-Б на фиг; 1; на фиг. 5 - технологическая схема монтажа комплекса; на фиг. 6 - то же, вид сверху; на фиг. 7 - разрез В-В на фиг. 6. Станок для монтажа и демонтажа м ханизированных крепей состоит из те лескопического основания, включающе го в себя нижнюю раму 1 с направляющими 2, по которьм под действием гидроцилиндра 3 перемещается рама 4 осуществляя таким образом продольну регулировку шага установки секций, устройства 5 поперечной подачи, мех низма 6 поворота вокруг продольной оси, устройства 7 вертикальной пода чи, устройств разворота 8 секций и захвата 9 и пульта 10 управления. Механизмы захвата 9 и разворота секции крепи и вертикальной подачи установлены последовательно один за другим вдоль продольной оси станка с возможностью перемещения один относительно другого. Устройство 5 поперечной подачи содержит каретку 11, перемещающуюся в направляющих 12 рамы 4 под действием гидроцилиндра 13. Механизм 6 поворота вокруг продольной оси состоит из двух гидроци пиндров 14 с блоками 15, закреплен#1ыми на штоках посредством пальцев 1 Ьдни концы которых оканчиваются пол Ьушкой и помещеныв Т-образные паЬы 17. На полом валу каретки 11 под Ьижно для поворота .закреплена 18 рама 19. Поворот ос1пцествляе ся посредством каната 20, намотанно го на цилиндрической части рамы 19 и проходящего через блоки 15 двух пздроцилиндров 14, работающих попеременно и закрепленных на каретке 11 Коэффициент обратной -полиспастности такой конструкции равен двум. Устройство 7 вертикальной подачи содержит раму 19, в направляющих которой может перемещаться рама 21 под действием гидроцилиндра 22. Так как устройство.вертикальной подачи расположено после механизма 6 поворота вокруг продольной оси, то оно в определенных условиях может выполнять еще и роль поперечной подачи. Устройство 8 разворота секций состоит из Г-образной рамы 23, соединенной с рамой 21 посредством пальца 24. Разворот осуществляется двумя гидроцилиндрами 25. Захваты 9 посредством пальцев 26 соединены шарнирно с рамой 23. Раздвижка X (захват секции) осуществляется двумя домкратами 27. Захват 9 представляет собой балку профиля, идентичного профилю направляющих базовой балки 28 для перемещения комбайна. Монтаж секции производят следующим образом (фиг. 5 и 6). В основном штреке 29 устанавливают лебедку 30, а в квершлаге 31 лебедку 32, отклоняющий блок 33 и перегрузочное устройство 34. Перегрузочное устройство 34 представляет собой каретку 35, перемещающуюся по монорельсу 36 гидроцилиндрами 37 и 38, соединенными между собой штоками. Гидроцилиндр 37 закреплен с монорельсом 36, а гидроцилиндр 38с кареткой 35, что обеспечивает перемещение каретки 35 на величину ходов обоих гидроцилиндров. Подъем и опускание груза осуществляется гидроцилиндром 39 посредством каната 40 через блоки. В кверишаге 31 проложены рельсовые пути 41 и путь 42, имеющий такой же профиль, что и направляющие базовой балки на секциях. Монтаж комплекса ведут с одновременной проходкой буровзрывным способом монтажной камеры 43. Отбитый уголь из монтажной камеры скрепером (не показан) подается на конвейер 44, установленный ниже монт ажной камеры в наклонном квершлаге 45. I Секции 46 крепи в собранном виде на платформах 4-7 по рельсовому пути 41 подают до перегрузочного устройства 34, где гидроцилиндром 39 подъема снимают с платформы и гидроцилиндрами 37 и 38 транспортируют на путь 42. В этот момент монтажный станок 48 находится в квершлаге около лебедки 32. Лебедкой 30 через блок 33 канатом монтажный станок передвигают к секции 46 и гидроцилиндрами 25 вводят захваты 9 в зацепление с направляющими базы 28. По выс те секция 46 регулируется гидроцилиндром 39 подъема перегрузочного устройства 34, Затем монтазкньй станок вместе с секцией подают в монтаж ную камеру. Для сокращения габарито выработок в местах сопряжения квершлага и монтажной камеры секхщю с Г-образной рамой 23 разворачивают гидроцилиндрами 25. В монтажной каме ре секцию поворачивают механизмом 6 поворота вокруг продольной оси, для чего включают гидроцилиндры 14. Шток верхнего гидроцилиндра выдвигается, а нижнего втягивается. Канатом 20 рама 19 будет осуществлять поворот, вместе с ней будут поворачиваться и захваты 9 с секцией 46 Затем включают гидроцилиндры 25 и секция 4 устройством 8 разворота будет разверачиваться в плоскости пласта. Наличие в монтажном станке продольной, поперечной, вертикальной подач, а также механизма поворота вокруг продольной оси и устройства разворота секций дают возможность легко устанавливать секции в монтажной камере и подсоединять к соседним секциям. С помощью предлагаемого монтажног станка можно вести монтаж механизированных крепей и вьппе основного .штрека, так как конструкция позволяет йроизводить поворот захватов 9 на 180 . Для этого на нижней раме 1 опоры заменяют на катки, а на заднюю часть рамы 4 устанавливают груз для противовеса. Станок перемещают по рельсовому пути, проложенному по поч ве основного штрека. Управление станком осуществляют с пульта 10 управления. , После отработки столба угля осуществляют демонтаж крепи следуюпщм образом. Если позволяют условия (состояние кровли и почвы) последние 2-3 метра комплекс проходит без приема закладки, затем своим ходом его опускают вниз. Впереди таким образом образовавшееся пространство оборудуют под демонтажную камеру. Крепят анкерами, производят настил рельс в кверпшаге для перемещения платформ и монтажного станка. Первые две секции демонтируют лебедкой,.установленной в кверпшаге, а остальные демонтируют монтажным станком 48. Для чего устройство 8 разворота механизмом 6 поворота вок,руг продольной оси устанавливают в. вертикальное положение и устройст;вом 7 вертикальной подачи захваты |перемещают вниз до направляющих базовой балки 28 и гидроцилиндрами 25 вводят в зацепление с ними. Включением гидррцилиндров25 рама 23 относительно пальцев 26 разворачивается в плоскости пласта до горизонтального положения секции. Затем включени ем гидроцилиндра 3 верхняя рама 4 вместе с секцией 46, перемещаясь ;По направляющим 2, приближает сек:цию 46 к раме t. Эта операция предусматривает приближение центра тяжести :секции к опорам манипулятора (транспортное положение). Монтажный станок с секцией лебедкой 32 транспортируют в квершлаг к перегрузочному устройству 34, где секцию подают на рельсовьш путь 41 и устанавливают на платформу 47. Таким же образом демонтируют все последующие секции. Если состояние кровли и почвы не позволяет комбайном пройти де- монтажную камеру, то ее проходят буровзрывным способом с последующим креплением.
Z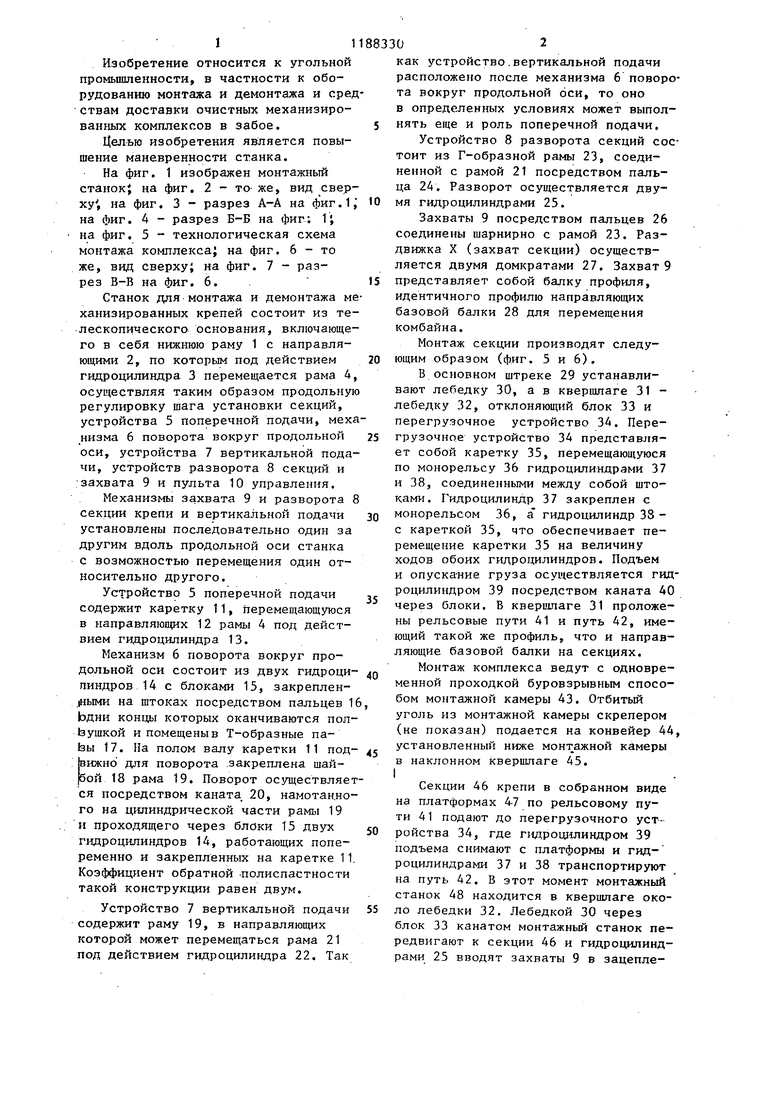

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для монтажа и демонтажа механизированной крепи | 1987 |
|
SU1461978A1 |
| Способ механизированного монтажа крепи на крутых пластах | 1987 |
|
SU1553698A1 |
| Станок для монтажа секций механизированной крепи и конвейера | 1982 |
|
SU1084455A1 |
| Опорно-поворотное устройство для горной машины | 1979 |
|
SU859645A1 |
| Способ монтажа механизированного комплекса монтажным станком | 1990 |
|
SU1765446A1 |
| Станок для монтажа и демонтажа механизированных крепей | 1976 |
|
SU767353A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ МОНТАЖА-ДЕМОНТАЖА СЕКЦИЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1994 |
|
RU2064586C1 |
| Устройство для монтажа механизированной крепи | 1984 |
|
SU1203245A1 |
| Шахтный кран | 1980 |
|
SU883472A1 |
| Монтажный станок для механизированнойКРЕпи | 1979 |
|
SU840382A1 |

СТАНОК ДЛЯ МОНТАЖА И ДЕМОНТАЖА МЕХАНИЗИРОВАННЫХ КРЕПЕЙ, включающий соединенные между собой верхнюю и нршнюю,рамы, расположенные на верхней раме механизмы поворота, захвата, разворота секций крепей вокруг продольной и поперечной осей выработки, вертикальной и поперечной подач, отлич. ающийся тем, что, с целью повьшения маневренности станка, механизм поворота вокруг продольной оси выполнен в виде барабана с канатными витками трения и двух гидродомкратов, симметрично закреплен ных относительно оси барабана и взаимодействующих с ним посредством каната, перекинутого через блоки, i закрепленные на штоках гидродомкратов, при этом механизмы захвата, раз(Л ворота и подач секций расположены последовательно вдоль станка с возможностью их относительного перемещения .
/I-Л
SS pvikNX
| Монтажный станок для механизированной крепи | 1975 |
|
SU569718A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Комплексная механизация и автоматизация при разработке угольных пластов Кузбасса и Дальнего Востока: Сб | |||
| научи, тр | |||
| - Прокопьевск, 1982, с | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| рис | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
