4;
О)
ю
о сд
Изобретение относится к машиностроению и может быть использовано в приводах различных машин в качестве инерционного трансформатора враш,ающего момента.
Цель изобретения - повышение экономичности трансформатора путем уменьшения масс грузов.
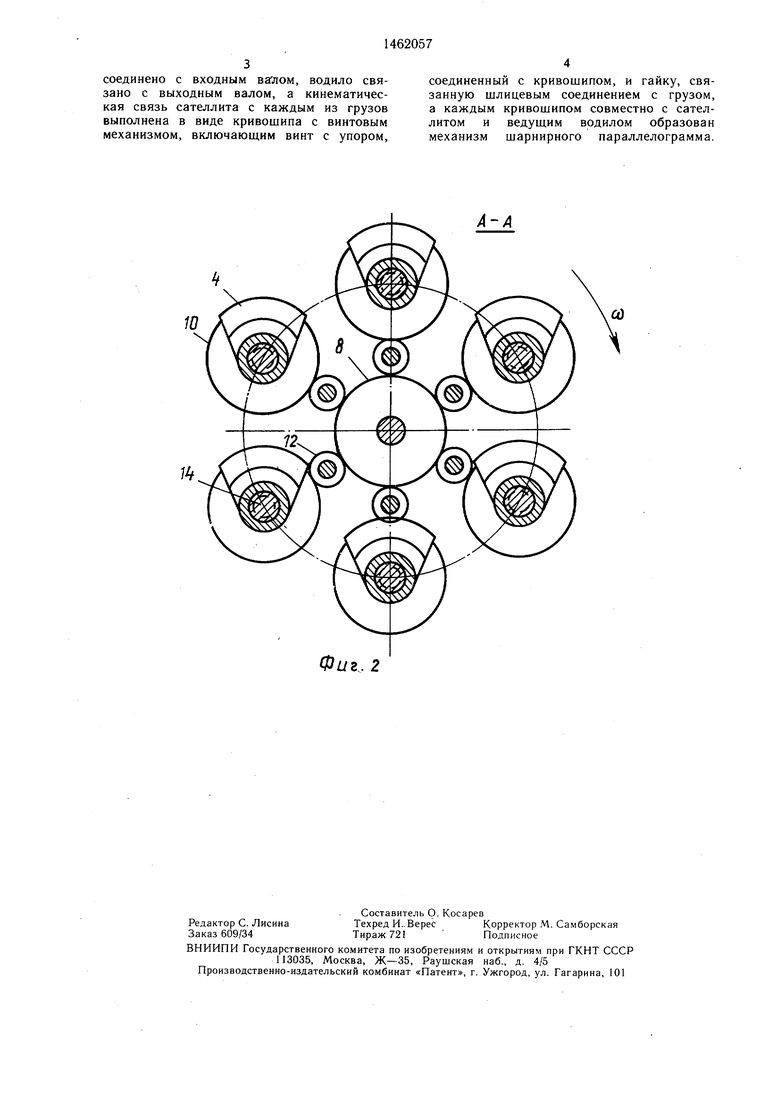
На фиг. 1 схематически изображен предлагаемый инерционный трансформатор вращаюшего момента; на фиг. 2 - сечение А-А на фиг. 1.
Инерционный трансформатор содержит корпус 1, размешенные в нем входной 2 и выходной 3 валы, грузы 4, два соосш,его момента, которыми на водиле б и выходном валу 3 формируется положительный врашающий момент, под действием которого вал 3 приобретает одностороннее врашение. При переходе грузов 4 из нижнего в верхнее положение (в левом секторе фиг. 2) они взаимодействуют с основными сателлитами 10 при помош.и МСХ 11 и создают на них отрицательные импульсы, которыми формируется на неподвиж- 10 ном центральном колесе 8 отрицательный врашаюший момент, замыкаемый на корпусе 1.
Вращаюший момент от входного вала 2
ных планетарных механизма, содержашие ,, на выходной вал 3 передается двумя пупервый - центральное колесо 5, водило 6 и кинематически связанный с грузами сателлит 7, а второй - соединенное с корпусо.м центральное колесо 8 с наружными зубьями, ведушее водило 9, основтями, механической и инерционной ветвями, что ведет к автоматическому регулированию угловой скорости ведушего водила 9 при равномерном врашении входного вала в зависимости от нагрузки и частоты вращеные сателлиты 10, связанные при помо- 20 ния выходного вала. Так, при равномерши механизмов свободного хода (МСХ) 11 с грузами 4, промежуточные сателлиты 12, каждый из которых взаимодействует с со- ответствуюшими основным сателлитом 10 и центральным колесом 8. Основные сателлином враш,ении входного вала, когда трансформатор работает в режиме муфты при небольшом моменте сопротивления на выходном валу, угловая скорость ведущего водила 9 равна угловой скорости входного
ты 10 и центральное колесо 8 выполнены вала и создаваемый на выходном валу
с одинаковым числом зубьев.
Для кинематической связи сателлита 7 первого планетарного механизма с грузами 4 сателлит 7 снабжен диском 13, а каждая
врашаюший момент равен моменту входного вала, а в стоповом режиме при наличии на выходном валу большого момента сопротивления угловая скорость ведушеврашаюший момент равен моменту входного вала, а в стоповом режиме при наличии на выходном валу большого момента сопротивления угловая скорость ведушеось основных сателлитов 10 второго плане- ,„ гр водила 9 с грузами 4 больше в i раз тарного механизма выполнена в виде кри-(i- отношение радиуса центрального колевошипа 14, один конец которого шарнирноса 5 к радиусу сателлита 7) от скосвязан с диском 13, образовав с ним и ведушим водилом 9 шарнирный паралле- лограммный механизм, а другой его конец связан при помоши винтового механизма, включаюшего в себя винт 15 с упором 16 и гайку 17, связанную шлицевым соединением 18 с грузом 4. При этом центральное колесо 5 первого планетарного механизма выполнено с внутренними зубьярости входного вала и создаваемый на выходном валу врашаюший момент больше в (l+i) раз от вращаюшего крутяшего мо- ,г мента входного вала, что позволяет уменьшить массу грузов.
45
Формула изобретения
Инерционный трансформатор врашаюшесоединено с входным валом 2, 40 го момента, содержаший корпус, входной
и выходной валы, грузы, механизмы свободного хода, два соосных планетарных механизма, первый из которых включает центральное колесо, водило и сателлит, кинематически связанный с грузами, а второй - заторможенное на корпус центральное колесо с наружными зубьями, ведушее водило, установленные в последнем на осях основные сателлиты, связанные механизмами свободного хода с грузами, установленными 50 на тех же осях, и промежуточные сателлиты, предназначенные для взаимодействия с основными сателлитами и заторможенным центральным колесом, причем основные сателлиты и центральное колесо имеют одинаковые числа зубьев, отличаюми и
водило 6 этого механизма соединено с выходным валом 3.
Трансформатор работает следуюшим образом.
При врашении входного вала 2 с центральным колесом 5 и наличии момента сопротивления на выходном валу 3 вза- имодействуюший с колесом 5 сателлит 7 при 1ЮМОШИ диска 13 и кривошипов 14 приводит в движение ведущее водило 9 с грузами 4. Под действием центробежных сил грузы 4 стремятся занять верхнее положение, наиболее удаленное от центра врашения, а кривошипы 14, взаимодействия с грузами 4 при помоши винта 15 и гайки 17, перемешают их в нижнее положение, ближе к центру трансформатора. 55 щийся тем, что, с целью повышения эконоПри этом силами инерции грузов 4 (в правом секторе фиг. 2) создаются на кривошипах 14 положительные импульсы врашаюмичности путем уменьшения массы грузов, в первом планетарном механизме центральное колесо выполнено с внутренними зубьями и
ш,его момента, которыми на водиле б и выходном валу 3 формируется положительный врашающий момент, под действием которого вал 3 приобретает одностороннее врашение. При переходе грузов 4 из нижнего в верхнее положение (в левом секторе фиг. 2) они взаимодействуют с основными сателлитами 10 при помош.и МСХ 11 и создают на них отрицательные импульсы, которыми формируется на неподвиж- ном центральном колесе 8 отрицательный врашаюший момент, замыкаемый на корпусе 1.
Вращаюший момент от входного вала 2
тями, механической и инерционной ветвями, что ведет к автоматическому регулированию угловой скорости ведушего водила 9 при равномерном врашении входного вала в зависимости от нагрузки и частоты вращения выходного вала. Так, при равномерном враш,ении входного вала, когда трансформатор работает в режиме муфты при небольшом моменте сопротивления на выходном валу, угловая скорость ведущего водила 9 равна угловой скорости входного
вала и создаваемый на выходном валу
врашаюший момент равен моменту входного вала, а в стоповом режиме при наличии на выходном валу большого момента сопротивления угловая скорость ведушерости входного вала и создаваемый на выходном валу врашаюший момент больше в (l+i) раз от вращаюшего крутяшего мо- мента входного вала, что позволяет уменьшить массу грузов.
мичности путем уменьшения массы грузов, в первом планетарном механизме центральное колесо выполнено с внутренними зубьями и
соединено с входным валом, водило связано с выходным валом, а кинематическая связь сателлита с каждым из грузов выполнена в виде кривошипа с винтовым механизмом, включающим винт с упором.
соединенный с кривошипом, и ганку, связанную шлицевым соединением с грузом, а каждым кривошипом совместно с сателлитом и ведущим врдилом образован механизм шарнирного параллелограмма.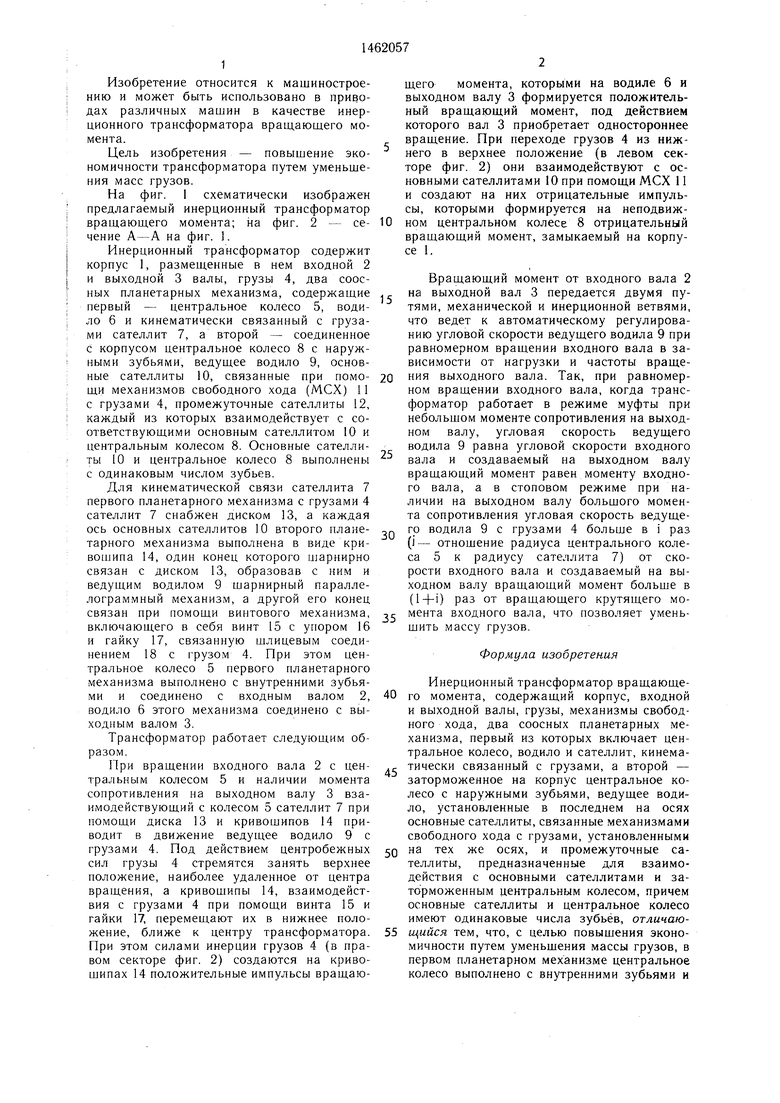
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
| Инерционный трансформатор вращающего момента | 1982 |
|
SU1017864A1 |
| Гидроинерционный трансформатор | 1990 |
|
SU1744350A1 |
| Инерционный трансформатор вращающего момента | 1988 |
|
SU1626029A2 |
| Инерционный трансформатор | 1989 |
|
SU1679099A2 |
| Инерционный трансформатор вращающего момента | 1989 |
|
SU1665127A2 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1763770A2 |
| Инерционный трансформатор | 1987 |
|
SU1477970A1 |
| Инерционный трансформатор вращающего момента | 1980 |
|
SU922368A1 |
| Гидроинерционный трансформатор | 1991 |
|
SU1810686A1 |
Изобретение относится к машиностроению. С целью повышения экономичности инерционного трансформатора путем уменьшения массы грузов при вращении входного вала 2 с центральным колесом 5 и сопротивления на выходном валу 3 сателлит 7 через кривошипы 14 приводит в движение ведушее водило 9 с грузами 4. Под действием центробежных сил грузы 4 стремятся занять наиболее удаленное от центра трансформатора положение, а кривошипы 14 через винтовые пары 15, 17 стремятся удержать грузы 4 в ближних к центру положениях. В течение полуоборота водила 9 груз 4 посредством винтовой пары 15, 17 соединяется с кривошипом 14, передавая ему положительный импульс вращающего момента, который через сателлит 7 и водило 6 перелается на выходной вал 3. В течение следующего полуоборота водила 9 груз 4 через механизм 11 свободного хода передает отрицательный импульс вращающего момента на основной сателлит 10 и далее через промежуточный сателлит 12 и центральное колесо 8 - на корпус 1. 2 ил.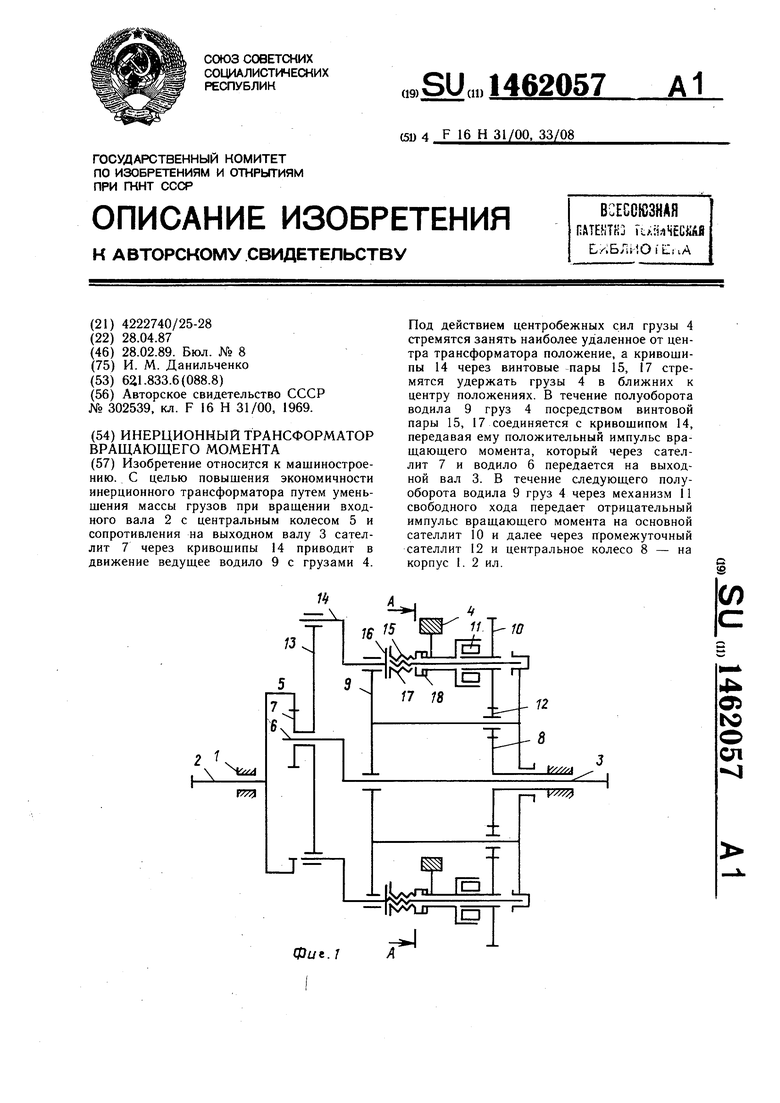
Фиг. 2
х1-х
| ШЕНТНО-ТЕХЙИ';Е:НДЯБИБЛИОТЕКАЮ. П. Мурзин | 0 |
|
SU302539A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
