Сталкиватели грузов с вилок автопогрузчиков, выполненные в виде подвижной вертикальной рамы, управляемой гидроцилиндрами и сопряженной с подъемно-опускной кареткой автопогрузчика посредством пары двойных параллелограммов, имеющих общее вертикальное звено и соединенных дополнительным звеном для ориентирования рамы в пространстве с одной степенью свободы, известны. Однако в таких сталкивателях имеет место скольжение рамы по вклкам.
Для устранения этого недостатка в описываемом сталкивателе дополнительное звено выполнено в виде гибкой тяги, натянутой между двумя соответственно спрофилированными кулаками (секторами), расположенными в щарнирах по концам наклонного звена и прикрепленнь1ми - один к каретке и другой - к соседнему звену. Поршень управляемого цилиндра сопряжен с наклонным звеном.
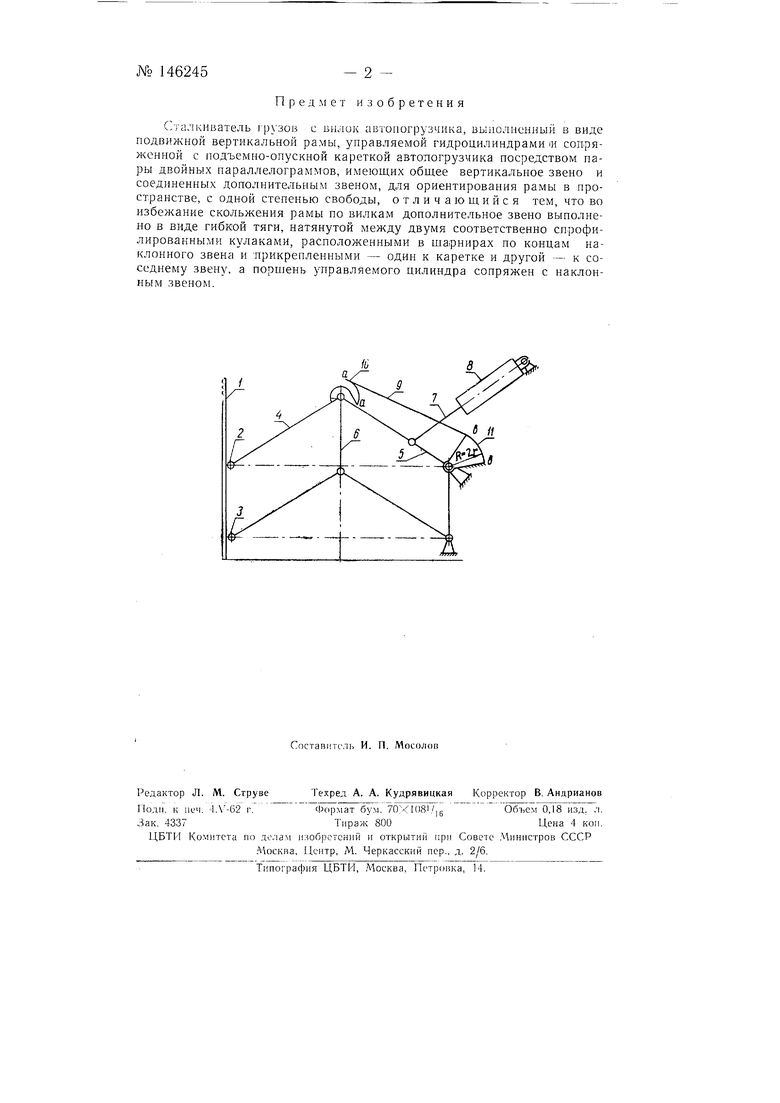
На чертеже изображена кинематическая схема сталкивателя.
Подвижная вертикальная рама / посредством щарниров 2 и 5 соединена с парой двойных параллелограммов 4 5, имеющих общее вертикальное звено 6 и приводимых в движение при помощи шарнирно сочлененного щтока 7 гидроцилиндром 8.
Перемещение рамы в горизонтальной плоскости достигается при помощи гибкого звена 9 и соединяемых им кулаков (секторов) 10 и 11. Подвижной кулак 10 с радиусом г и рабочей дугой а-а жестко закреплен на наклонном элементе параллелограмма 4, а неподвижный кулак // с радиусом R 2г ц рабочей дугой b-b жестко закреплен на корпусе автопогрузчика. Такое соотношение радиусов секторов и обеспечивает раме горизонтальное перемещение.
Сталкиватель может найти широкое применение в промышленности и на транспорте, в частности, в морских и речных портах, использующих обширный парк авто- и электропогрузчиков для транспортирования и перегрузки Мешковых, яшичных и других грузов.
Предмет изобретения
Огалкиватель 1рузов с вилок автопогрузчика, вьпюлненный в виде подвижной вертикальной рамы, управляемой гидроцилиндрами 1И сопряженной с подъемно-опускной кареткой автопогрузчика посредством пары двойных параллелограммов, имеюш;их общее вертикальное звено и соединенных дополнительным звеном, для ориентирования рамы в пространстве, с одной степенью свободы, отличающийся тем, что во избежание скольжения рамы по вилкам дополнительное звено выполнено в виде гибкой тяги, натянутой между двумя соответственно спрофилированными кулаками, расположенными в щарнирах по концам наклонного звена и прикрепленными - один к каретке и другой - к соседнему звену, а поршень управляемого цилиндра сопряжен с наклонным звеном.