Изобретение относится к эксперкг-лен- альной аэродинамике м может быть исользовано при весовых испытаниях.
Целью изобретения является повышеие точности определения агродинамйче- ких коэффициентов прч pacmnpei-itui ласса исследуемых тел.
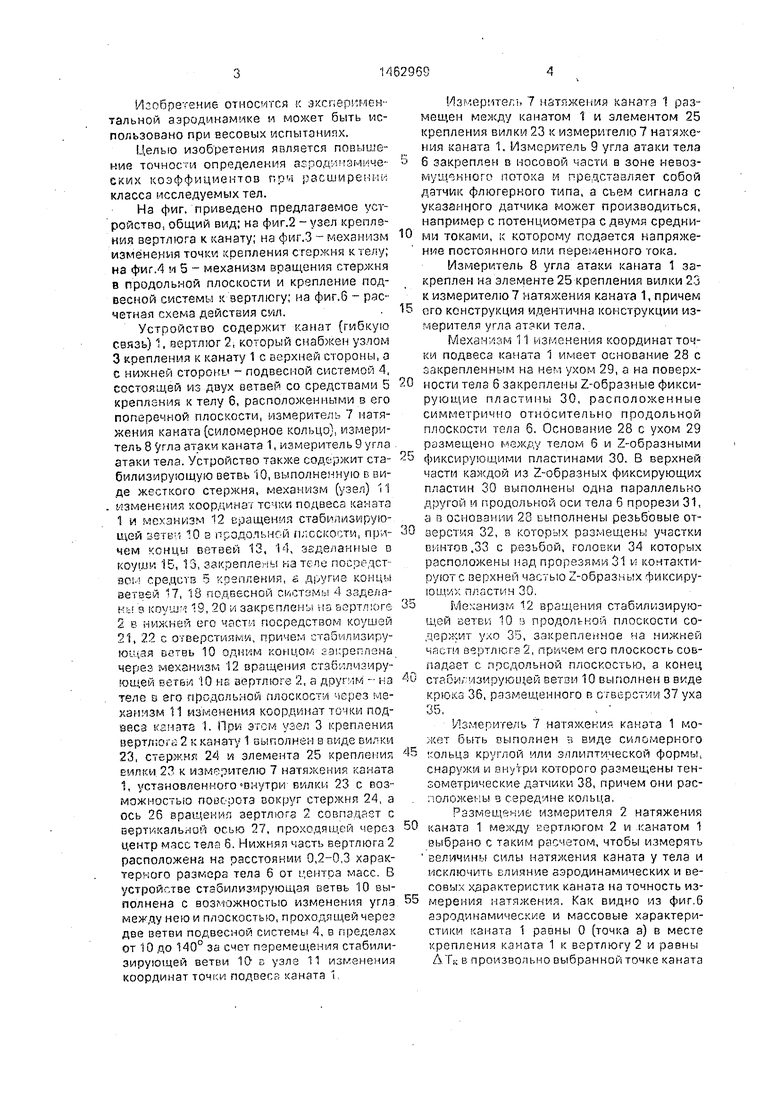
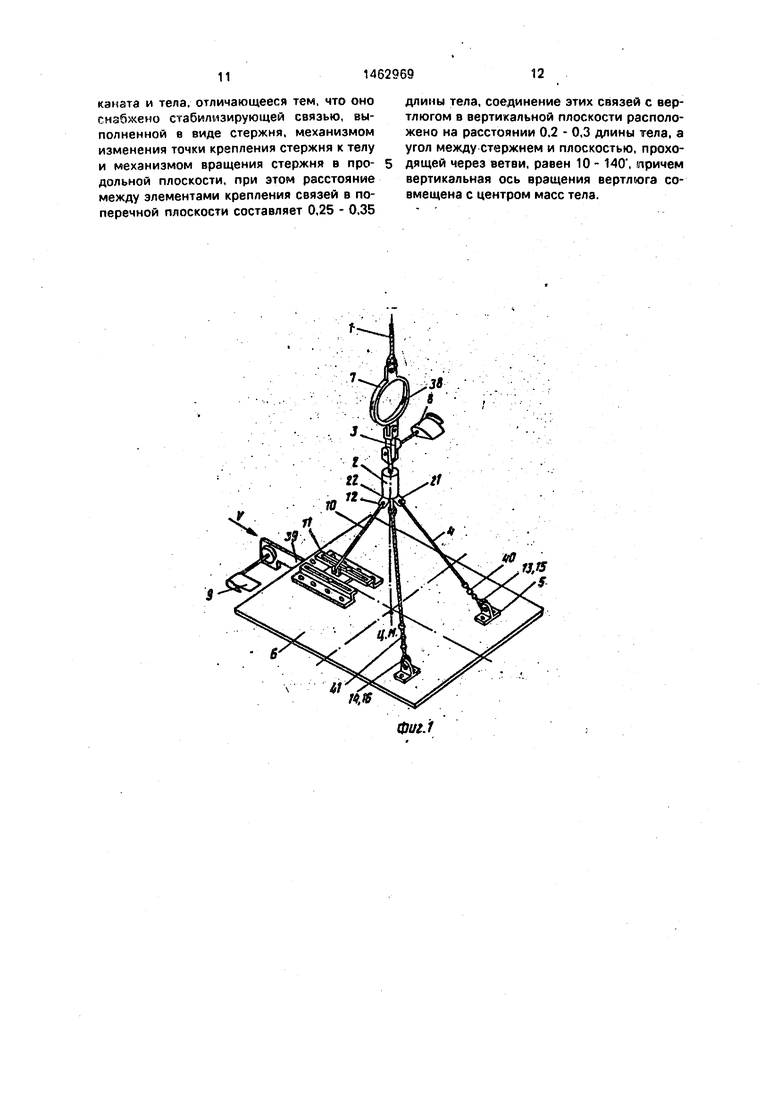
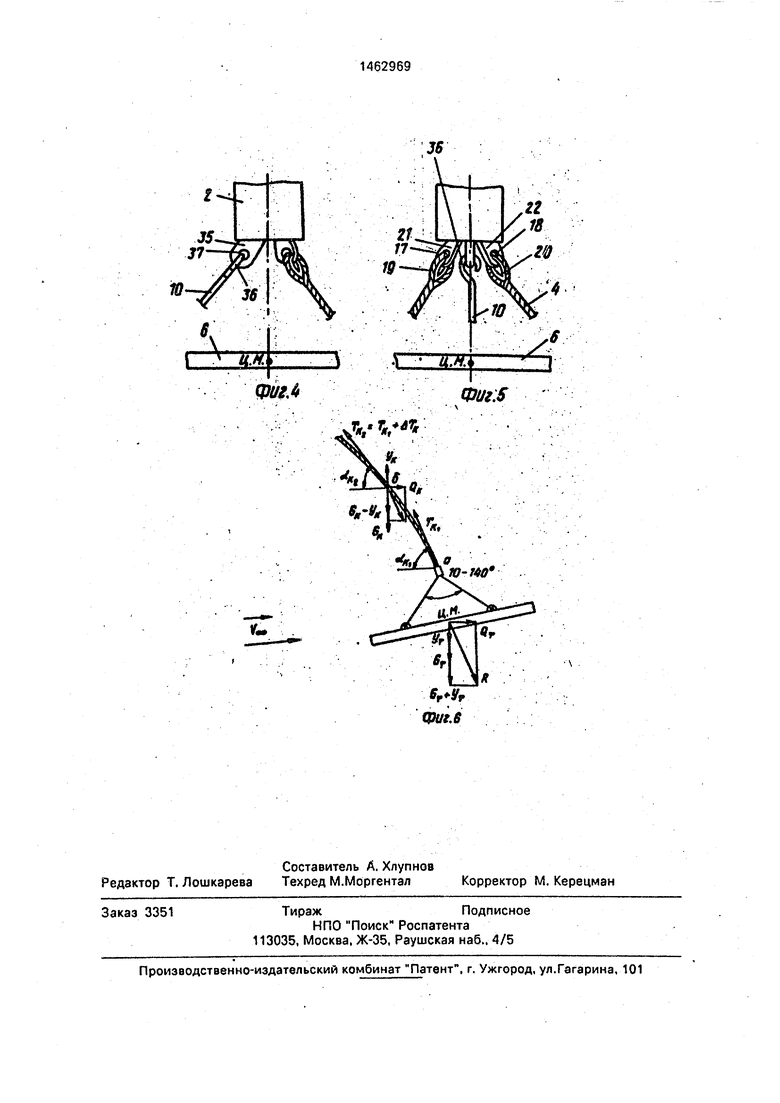
На фиг. приведено предлагаемое уст- ойство, общий вид; на фиг.2 - узел креплеия вертлюга к канату; на фмг.З - механизм зменения точки репления стержня к телу; а фиг.4 1 5 - механизм вращения стержня в продольной плоскости и крепление подвесной системь к зертлюгу; на фиг.6 - расетная схема действия сил.
Устройство содержит канат (гибкую связь) 1, вертлюг 2, который снабжен узлом 3 крепления к канату 1 с верхней стороны, а с нижней стороны - подвесной системой 4, состоящей из двух ветвей со средствами 5 крепления к телу 6, расположенными в его поперечной плоскости, измеритель 7 натя- хения каната(силомерное кольцо), измеритель 8 угла атаки каната 1,измеритель 9 угла атаки тела. Устройство также содержит стабилизирующую ветвь 10, выполненную в виде жесткого стержня, механизм (узел) 11 изменения координат точки, подвеса каната
1и механизм 12 вращения стабилизирующей зетв, 10 в продольной плоскости, причем концы ветвей 13, 14, ззделанные в коущи 15, 13, закреплены на теле посре-дст- ВО. средств 5 крепления, & другие концы ветвей 17, 18 подБвсной ci/tCTSMbi 4 зздела- Hcf в коуш 19, 20 и закреплены нз вертлюге
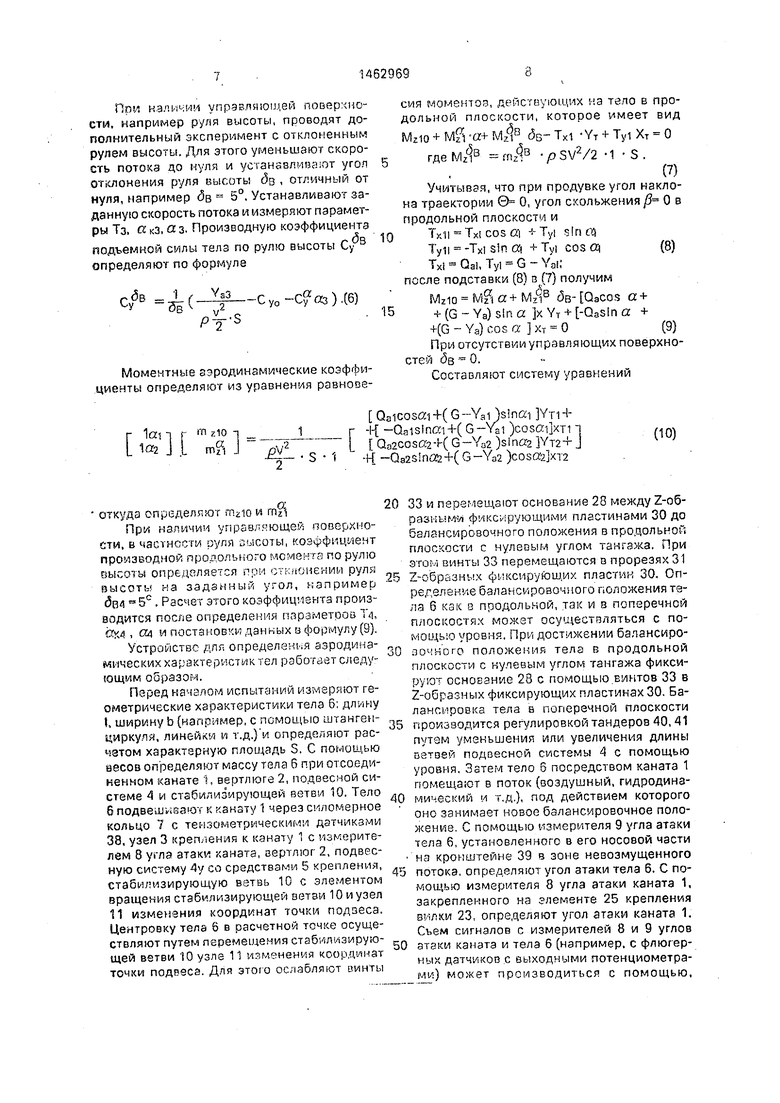
2в нижней цго частгл посредством коушей 21, 22 с отЕерсти5Ш1И причем стабилизирующая ветвь 10 одним концом гэкреплзна через механизм 12 вращения стабилизирующей 10 не вертлюге 2, а другим - из теле в его продольной плоскости через механизм 11 изменения координат точки no,q- аеса каната 1. При этом узел 3 крепления йертлюгй 2 к канату 1 выполнен в виде вилки 23, стержня 24 и элемента 25 крепления ЕМЛКМ23 к изм(5;Э1.1телю 7 натяжений каната 1, установленного внутри вилки 23 с возможностью поворота вокруг стержня 24, а ось 26 вращения зертлюга 2 совпадает с вертикальной осью 27, проходяш,ей через центр масс тела 6. Нижняя часть вертлюга 2 расположена на расстоянии 0,2-0,3 характерного размера тела 6 от центра масс. В устройстве стабилизирующая ветвь 10 выполнена с возможностью изменения угла между нею и плоскостью, проходящей через две ветви подвесной системы 4, в пределах от 10 до 140° за счет перемещения стабилизирующей ветви 10 в узле 11 измч нения координат точки подвесй каната 1,
0
5
0
5
0
5
ИзрлерЕ1те/-;|, 7 натяжения каната 1 размещен между канатом 1 и элементом 25 крепления вилки 23 к измерителю 7 натяжения каната 1. Измеритель 9 угла атаки тела 6 закреплен в носовой части в зоне невоз- мущениого потока м представляет собой датчик флюгерного типа, а съем сигнала с указанного датчика может производиться, например с потенциометра с двумя средними токами, ( которому подается напряжение постоянного или переменного тока.
Измеритель 8 угла атаки каната 1 закреплен на элементе 25 крепления вилки 23 к измерителю 7 натяжения каната 1, причем его конструкция идентична конструкции измерителя угла атаки тела.
Механ;. |зм 11 изменения координат точки подвеса каната 1 имеет основание 28 с закрепленным на нем ухом 29, а на поверхности тела 6 закреплены Z-образные фикси- руюа1ие пластины 30, расположенные симметрично относительно продольной плоскости тела 6. Основание 28 с ухом 29 размещено г /1ежду телом 6 и Z-образными фиксирующими пластинами 30. В верхней части камсдой из Z-образных фиксирующих пластин 30 выполнены одна параллельно ,цругой и продольной оси тела 6 прорези 31, а в основании 23 выполнены резьбовые отверстия 32, 8 которых размещены участки винтов.33 с резьбой, головки 34 которых расположены над прорезями 31 и контактируют с верхней частью Z-образных фиксиру- 101ЦИХ пластин 30.
1еханизм 12 вращения стабилизирую- ш,ей ветЕи 10 з продольной плоскости содержит ухо 35, закрепленное на нижней части вертлюга 2, причем его плоскость совпадает с прс,дольной плоскостью, а конец стабм/ ;изируюи:;ей ветзм 10 выполнен в виде крюка 36, размещенного в стверстми 37 уха 35,.
Измеритель 7 натяжения, каната 1 может выполнен в виде силомерного кольцз круглой или эллиптической формы, снаруж л и внутри которого размещены тен- зометрические датчики 38, причем они расположены 3 середине кольца.
Размещение измерителя 2 натяжения каната 1 между вертлюгом 2 и -канатом 1 выбрано с таким расчетом, чтобы измерять величины силы натяжения каната у тела и исключить влияние аэродинамических и весовых хг1рактеристик каната на точность измерения натяжения. Как видно из фиг.6 аэродинамические и массовые характеристики каната 1 равны О (точка а) в месте крепления к.эната 1 к вертлюгу 2 и равны АТк в произвольно выбранной точке каната
(точка б) поэтому силы натяжения каната 1 в точках а и б не равны Тк2 Тк1.
Измеритель 9 угла атаки тела закреплен посредством кронштейна 39 теле б таким образом, чтобы он находился в зоне невозмущенного потока.
Для балансировки тела б с нулевым углом крена в боковой плоскости ветви подвесной системы 4 снабжены тандерами 40. 41.
Измеритель 8 угла атаки каната 1, определяющий угловое положение вектора силы натяжения каната 1, размещен между измерителем 7 натяжения каната 1 и вертлюгом 2, так как в этом месте размещен измеритель 7 натяжения каната 1, определяющий величину вектора силы натяжения каната Тк1. Такое размещения измерителя 8 угла атаки каната 1 исключает влияние изменения направления вектора силы натяжения каната 1 по его длине за счет прогиба каната на точность измерения угла атаки каната у тела ( а к2 о- KI).
Передача сигналов с измерителей В, 9 углов атаки каната и тела и измерителя 7 натяжения каната 1 для регистрации и их запитка постоянным или переменным напряжением могут осуществляться, например по кабель-тросу.
Для измерения углов атаки каната 1 и тела 6 при продувке последнего в аэродинамической трубе можно, например, использовать теодолит.
Определение аэродинамических коэффициентов тела осуществляется следующим образом.
Перед началом испытаний определяют геометрические характеристики тела б (например, для плоского тела): характерную площадь S и характерный размер I. При изготовлении тела б предусматривают места крепления средств крепления 5 подвесной системы 4 и узла 11 изменения координат точки подвеса каната 1. Определяют массу тела при отсоединенных канате 1, вертлюге 2, подвесной системе 4 и стабилизирующей ветви 10. Тело б подвешивают через канат 1, силомерное кольцо 7, вертлюг 2, подвесную систему 4, стабилизирующую ветвь 10, производят центровку тела О в расчетной точке и устанавливают фиксированную скорость потока V. Измерение скорости потока V может осуществляться с помощью измерителя скоростного напора, размещенного в зоне невозмущанного потока. Под действием аэродинамических и массовых сил тело б занимает балансировочное положение. Измеряют силу натяжения каната 1 у тела 6, Ti, угол атаки каната 1 у тела 6а к1 и угол
и
атаки тела б а i. Уменьшают скорость потока до нуля и смещают точку подвеса каната 1 вдоль продольной оси тела б в пределах XT 0,07-0.11 характерного размера тела
одновременно со смещением вдоль вертикальной оси, выполняя соотношение YT Va2-(xT-Xo + YO. где YT - вертикальное смещение; хт - горизонтальное смещение .оси; Хо, YO - координаты центра
окружности относительно центра масс тела; а - радиус окружности. При этом изменение угла атаки тела б не должно превышать ± 5, что соответствует линейному диапазону изменения аэродинамических характеристик тела б. Устанавливают заданную скорость потока V и измеряют параметры Т2, а. K2i ct 2 при новом положении точки подвеса, т.е. оси вращения.
Весовые аэродинамические коэффициенты определяют по следующей методике: вычисляют проекции Тх( и Ту; силы натяжения каната Ti на оси ОХ м OY для двух вариантов эксперимента
25Txl TiCOS Ск ,
Ty| T|Sln ССк ,
(1)
где I 1,2,,. и т.д. - номер эксперимента. С другой стороны
Тх1 Qal
Ту f -Yaf + mg,(2)
где Qal - сила лобового сопротивления тела; 35 Yai - подъемная сила тела; g - ускорение силы тяжести. Из (2) находят
Gal Txl ,
40 Yai mg - Ту ,
Составляют систему уравнений
(3)
г 1 «1 -1 г С УО -1 1Г Yai 1
Li«2 J L c J TZTrL «4
о- -S и п
а
откуда определяют Суо и Су 50 Составляют систему уравнений
(4)
ы
;i
Схо-
в
(C)2
Qal Qa2
(5)
откуда определяют Схо и В. где В - коэффициент отвала полярны.
При наличии упрэйлнющей поверхности, например руля высоты, проводят дополнительный эксперимент с отклоненным рулем высоты. Для этого уменьшают скорость потока до нуля и устанавлитзают угол отклонения руля высоты дв , отличный от нуля, например 5в 5°. Устанавливают заданную скорость потока и измеряют параметры Тз. « кЗ, а 3, Производную коэффициента
г OB
подъемной силы тела по рулю высоты Су определяют по формуле
.
-С
УО
),(6)
Моментные аэродинамические коэффи- диенты определяют из уравнения равновесия 1оменто 3, действующих на тело в продольной плоскости, которое имеет вид
МгЮ + МЙ «+ Мг дв- Тх1 YT + Ту1 XT О
ц гдеМг з т -psvVa -1 -s.
.(7)
Учитывая, что при продувке угол наклона траектории € О, угол скольжения ;3 О в продольной плоскости и 10 Тки Тх1 COS а | +Ту1 sinct
Tyii -Txi sin a + Tyi cos cq(8)
Txl Qal, Tyi G - Yai,- после подставки (8) в (7) получим
Mzio а+ 5в- Qacos a + 15+(G-Ya)slna хУт + -0881псг +
+(G - Ya) COS a XT 0(9)
При отсутствии управляющих поверхностей (5в 0.
Составляют систег у уравнений

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения аэродинамических характеристик моделей и устройство для его осуществления | 1986 |
|
SU1462970A1 |
| Способ определения аэродинамических коэффициентов моделей летательных аппаратов | 1982 |
|
SU1130098A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| Устройство для буксировки диполей антенной системы | 1986 |
|
SU1436398A1 |
| Вертолетная внешняя подвеска | 2015 |
|
RU2608824C1 |
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |
| КИНЕТИЧЕСКАЯ БОЕГОЛОВКА С АЭРОДИНАМИЧЕСКИМ НАВЕДЕНИЕМ | 2022 |
|
RU2825027C2 |
| Устройство для буксировки гибких систем | 1987 |
|
SU1496165A1 |
| Устройство для уборки буксируемых тел | 1987 |
|
SU1459156A1 |
| Буксируемая система | 1988 |
|
SU1724513A1 |

Изобретение относится к экспериментальной аэродинамике и может быть использовано при весовых испытаниях Целью изобетения является повышение точности определения аэродинамических коэффициентов при расширении класса исспедуе- .мых теа Для этого устанавливают первоначальное вертикальное смещение оси поворота относительно центра масс тела в пределах 02 - 0,3 длины тела, а при горизонтальном смещении этой оси относительно центра масс в сторону носовой части тепа в пределах 0,07 - 0,11 длины тела, одновременно смещают ее и в вертикальном направлении, выпол/22 няя соотношение Y va -(X -X ) + Y , где Y тТООт вертикальное смещение оси; X - горизонтальное смещение оси; X , У - координаты центра окружности относительно центра масс тела; а - радиус окружности. Устройство снабжено стабилизирующей ветвью, выполненной в виде стержня, и механизмами изменения точки крепления стержня к телу и вращения стержня в продольной плоскости. При этом расстояние между элементами крепления ветвей в поперечной плоскости составляет 0,25 - 0,35 длины тела, соединение этих ветвей с вертлюгом расположено в вертик2.г1ьной плоскости на расстоянии 02 - 0,3 длины тепа, а угол между стержнем и плоскостью, проходящей через ветви, равен 10 - И0°, причем вертикальная ось вращения вертлюга проходит через центр масс тела. 2 сп. ф-лы 6 иа
шЛ.
ГП z10 Т
J
откуда определяют ШгЮ и mzi
Hpi/t наличии управляющей пооерхно- сти. в частности руля аысоты, коэффициент производной продольного MCwiBHTa по рулю высоты определяется при откиоиеним руля высоты на задзнный угол, например (5в4 5°, Расчет этого коэффициента производится после определен11я параметров , ак4 , С(4 и постановки данных ц формулу (9). Устройстве для. определе-нмя аэродинамических характеристик тел работает следующим образом.
Перед началом испытаний измеряют геометрические характеристики тела Б; длу1ну , ширину b (например, с помощью штангенциркуля, линейки и т.д.) и определяют расчетом характерную площадь S. С помош,ью весов определяют массу тела б при отсоединенном канате 1, вертлюге 2, подвесной системе А и стабилизирующей ветви 10. Тело 6 подвешивают к какзту 1 через силомерное кольцо 7 с тензометрическимм датчиками 38, узел 3 крепления к канату 1 с измерителем 8 угла атаки каната, вертлюг 2, подвесную систему 4у со средствами 5 крепления, стабилизирующую ветвь 10 с элементом вращения стабилизирующем ветви 10 и узел 11 изменения координат точки подзеса. Центровку тела 6 в расчетной точке осуществляют путем перемещения стаб-.члизирую- щей ветви 10 узле 11 изменения координат точки подвеса. Для этого ослабляют винты
Qaicosai+(G-Yai )slno:i jYrH- -Qaisino:i+( G-Yai )cosaijxTi 1
Qa2COSa2-K G-Ya2 )slna2 jYT2+ J -H -Qa2S n 3a+( G-Ya2 )cOSa2 xT2
0 33 и перемещают основание 28 между Z-об- pasHUMVi фиксирующими пластинами 30 до балансировочного положения в продольной плоскости с нулевым углом тангажа. При этом винты 33 перемещаются в прорезях 31 5 Z-образных фиксирующих пластин 30. Определение балансировочного положения тэ- ла б как в продольной, так и в поперечной плоскостях может осуществляться с помощью уровня. При достижении балансиро- 0 зочного положения тела в продольной плоскости с нулевым углом тангажа фиксируют основание 23 с помощью.БМНТОВ 33 в Z-образных фиксирующих пластинах 30. Балансировка тела Б поперечной плоскости 5 производится регулировкой тандеров 40,41 путам уменьшения или увеличения длины ветвей подвесной системы 4 с помощью уровня. Затем тело 5 посредством каната 1 помещают в поток (воздушный, гидродина- 40 мический и т.д.), под действием которого оно занимает новое балансировочное положение. С помощью измерителя 9 угла атаки тела 6, установленного в его носовой части на кронштейне 39 в зоне невозмущенного 45 потока, определяют угол атаки тела 6. С помощью измерителя 8 угла атаки каната 1, закрепленного на элементе 25 крепления вмлки 23, опре,целяют угол атаки каната 1. Съем сигналов с измерителей 8 и 9 углов 50 атаки каната и тела б (например, с флюгерных датчиков с выходными потенциометрами) может производиться с помощью.
например тестера, причем выходное напряжение с выходных потенциометров флюгерных датчиков должно быть г.ротарировано в зависимости от угла поворота их подвижной части. С помощью тензометрических датчиков 38 силомерного кольца 7 определяют силу натяжения каната 1 у тела 6. Тело 6 убирают из потока. Расчетом определяют величину перемещения точки подвеса в сторону носовой части в пределах XT 0,07-0,11 характерного размера тела, причем угол атаки тела 6 не должен превышать значения более 5° при заданной скорости потока. Ослабляют винты 33 и перемещают основание 28 между Z-образными фиксирующими пластинами 30 в сторону носовой части на расчетную величину. Фиксируют основание 28 С помощью винтов 33 в Z-образных фиксирующих пластинах 30. Перемещение точки подвеса каната 1 к вертлюгу 2 по дуге окружности осуществляется благодаря наличию крюка 36 и уха 35 механизма 12 вращения стабилизирующей ветви 10. Тело 6 помещают в поток, и оно занимает новое балансировочное положение. С помощью измерителя 9 угла атаки тела 6, измерителя 8 угла атаки каната 1, измерителя 7 натяжения каната 1 определяют углы атаки тела 6 и каната 1. а также силу натяжения каната 1. Определяют скоростной напор с помощью измсфителя скоростного напора (на фиг. 1 не показан). По данным для двух положений точки подвеса каната 1 к телу 6 рассчитывают аэродинамические коэффициенты. Для определения зависимости Cy f(a ) основание 28 перемещают в Z-o5- разных фиксирующих пластинах 30 в пределах XT 0,07-0,11 характерного размера тела 6 и фиксируют поочередно в ряде точек
Формула изобретения 1. Способ определения аэродинамических характеристик тел, основанный на определении углов атаки тела и гибкой сеязы и усилия, действующего на гибкую связь в точке соединения с подвеской при смещении оси поворота тела относительно его центра масс, по которым рассчитывают соответствующие аэродинамические характеристики, отличающийся тем, что, с целью повышения точности определения аэродинамических коэффициентов при расширении класса исследуемых тел, устанавливают первоначальное вертикальное смещение оси поворота относительно центра масс тела в пределах 0,2 - 0.3 длины тела, а при горизонтальном смещении этой оси относительно центра масс в стопри условии изменения углов этзки тела б не более 5.
Предлагаемый способ определения аэродинамических характеристик тел и уст- 5 ройство для его осуществления позволяют повысить точность определения аэродинамических коэффициентов по сравнению с базовым объектом, в качестве которого выбран прототип, за счет снижения колебаний
10 тела в потоке и повышения точности измерения усилий, действующих на гибкую связь, углов атаки тела и гибкой связи. Кроме тогд, к преимуществам предлагаемого способа и устройства для его реализации
15 относится возможность определения аэродинамических тел с высокорасположенным крылом, а тгкжз плоских и неоперенных тел за счет перемещения точки подвеса каната к телу в продольной плоскости вдоль двух
20 взаимно перпендикулярных осей, что по- зеоляет расширить классы исследуемых тел. К другим преимуществам способа и устройства относится возможность определения аэродинамических характеристик тел в бо25 лее широком диапазоне скоростей за счет обеспечения продольной устойчивости тела. Предлагаемые способ и устройство имеют большое значение при определении аэроди.чамических коэффициентов тел, лод0 вешиваемых из канате, при букс фовке их движущимися объектами. Идентификация аэродинамических коэффициентов буксируемых на канате тел может производиться по результатам летных испытаний.
5 (56) Горлиц С.М, Экспериментальная аэро- динами а, М.: Высшая школа, 1970, с. 244- 253.
Авторское свидетельство СССР N5 1130098, кл. G 01 М 9/00, 1982.
0
рону носовой части тела в пределах 0,07 - 0.11 длины тела одновременно смещают ее и в вертикальном направлении, выпол- 5 няя соотношение
VT V a -fXr-X +YO , где YT - вертикальные смещения оси; XT - горизонтальные смещения оси; 0 Хо . YO - координаты центра окружности
относительно центра масс тела; а - радиус окружности. 2. Устройство для определения аэродинамических характеристик тел, содержа- 5; щее подвесную систему, состоящую из даух связей с элементами крепления к телу, расгюложенными в поперечной плоскости, вертлюг, с которым соединены ветви подвесной системы и канат, измеритель натяжения каната и датчики углов атаки
каната и тела, отличающееся тем, что оно снабжено стабилизирующей связью, выполненной в виде стержня, механизмом изменения точки крепления стержня к телу и механизмом вращения стержня в продольной плоскости, при этом расстояние между элементами крепления связей в поперечной плоскости составляет 0.25 - 0.35
4/
Х1ЛИНЫ тела, соединение этих связей с вертлюгом в вертикальной плоскости расположено на расстоянии 0.2 - 0.3 длины тела, а угол между стержнем и плоскостью, проходящей через ветви, равен 10 -140 . причем вертикальная ось вращения вертлюга совмещена с центром масс тела.
Jil.tS
JV
jj
it
so
iS
ФигЛ
Фиг
