иг. 3
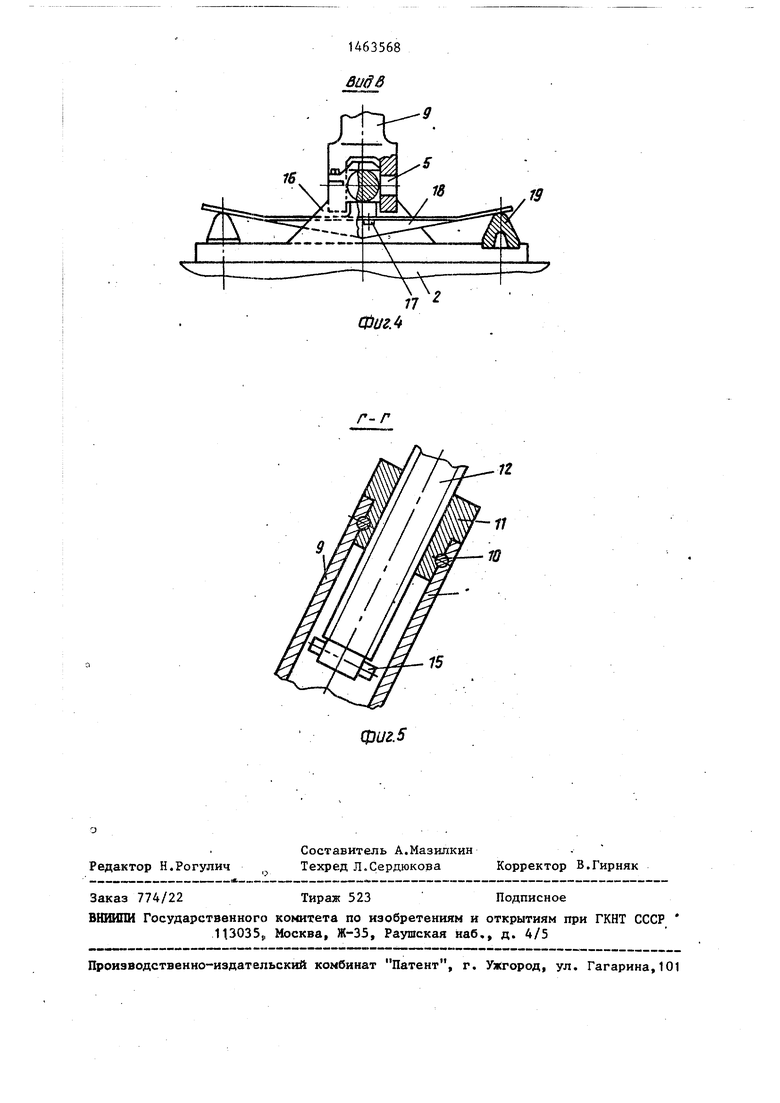
19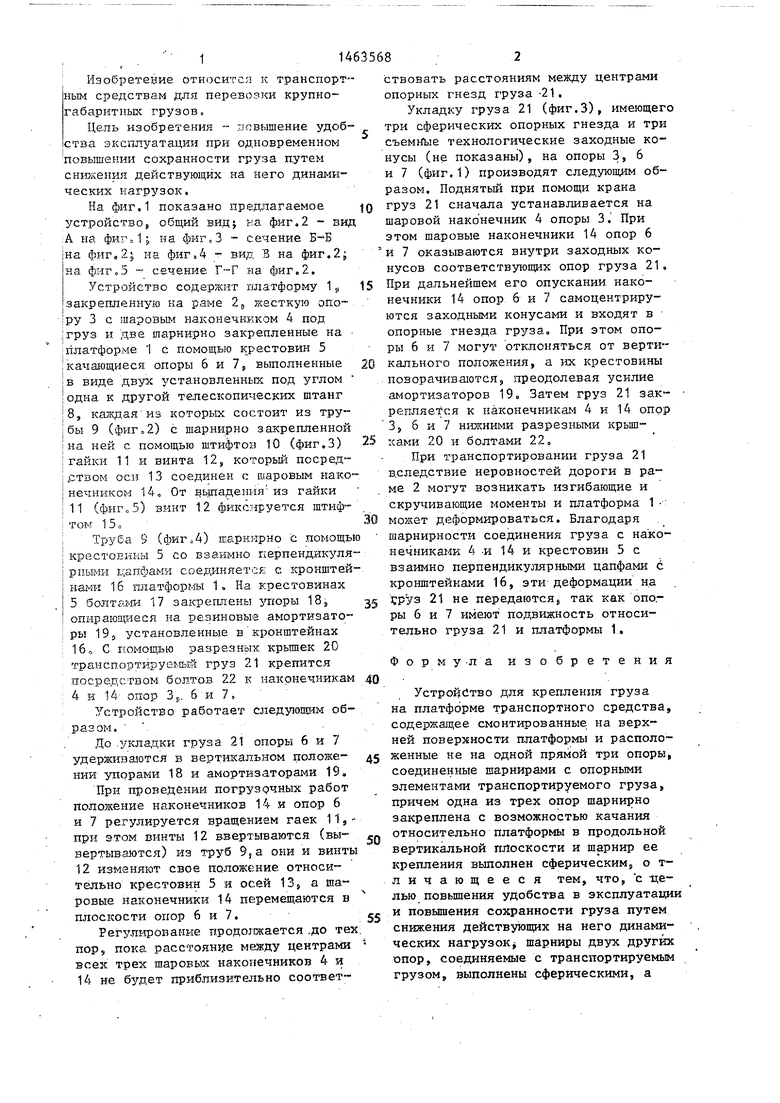
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРИКЦИОННЫЙ ПРИВОД КАРЕТКИ ВЕРТИКАЛЬНОГО ПОДЪЕМНИКА | 2016 |
|
RU2637702C2 |
| Установка для перегрузки штучных грузов | 1989 |
|
SU1775338A1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 1966 |
|
SU177749A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Способ абразивной обработки плоских поверхностей прямоугольных деталей и устройство для его осуществления | 1986 |
|
SU1366371A1 |
| Стенд для испытания ленты кон-ВЕйЕРА | 1978 |
|
SU802136A1 |
| Устройство для измерения отклонения формы внутренней поверхности экрана кинескопа | 1989 |
|
SU1675655A1 |
| Подъемный стол | 1990 |
|
SU1745672A1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2137701C1 |
| СТЕНД ДЛЯ НАТУРНЫХ ИСПЫТАНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2158908C1 |
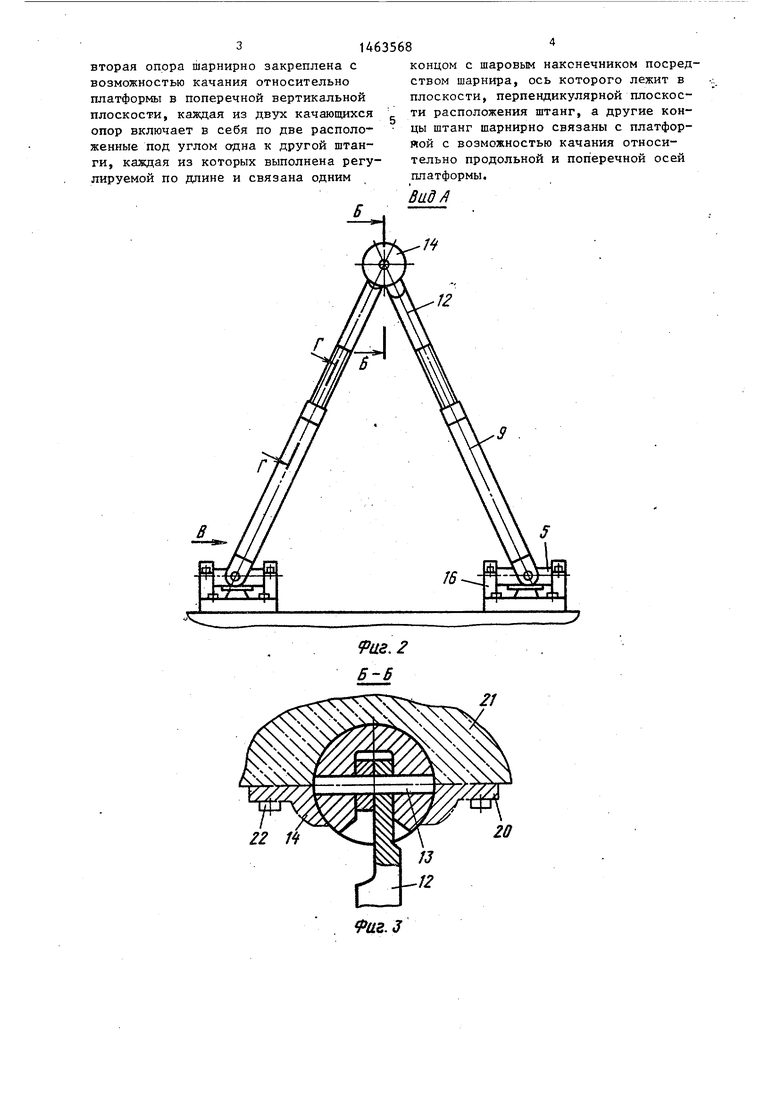
Изобретение относится к транспортным средствам для перевозки крупногабаритных грузов. Цель изобретения - повышение удобства эксплуатации при одновременном повышении сохранности груза путем снижения действующих на него динамических нагруаок. Платформа 1 для трехопорного груза содержит установленную в продольной плоскости симметрии с -возможностью качания в этой плоскости центральную опору 7 со сферическим опорным элементом 14 под транспортируемый груз и закрепленные по обе стороны относительно этой же плоскости две другие опоры 3 и 7, одна из которых (опора 3) выполнена жесткой, а другая (опора б) закреплена на платформе 1 с возможностью качания в ее поперечной плоскости. При этом опоры 6 и 7 вьтолнены в виде расположенных под углом друг к другу штанг 8 с шаровыми наконечниками 14 под транспортируемый груз, каждая из которых вьшолнена регулируемой по длине и связана одним концом с шаровым наконечником 14 посредством шарнира, ось которого лежит в плоскости, перпендикулярной плоскости расположения штанг 8, а другим концом через крестовину 5 с взаимно перпендикулярно расположенными цапфами - с платформой 1. 5 Ш1. с О)
фцгЛ
15
фиг. 5
