1
Изобретение относится к подъемно- транспортной технике, а именно к грузозахватным устройствам.
Цель изобретения - расширение ти- .поразмеров захватываемых грузов.
На фиг. 1 показано грузозахватное устройство, общий вид; на .фиг. 2 - то же, вид сверху; на фиг. 3 - то же, поднятое краном над рабочей площадкой; на фиг. 4 - разрез на фиг.2; на фиг. 5 - вид Б на фиг. 4-, на фиг. 6 - установка дополнительного рабочего элемента захватных органов , на фиг. 7 - то же, вариант; на фиг.8 - .разрез В-В на фиг. 6.
Грузозахватное устройство содержит раму 1 с вертикальными, полками.2, приводные захватные органы 3 с рабочими элементами для контакта с грузом,. Продольные балки 4 рамы 1 выполнены с консолями, на которых расположены захватные органы 3. Одна из поперечных балок 5 рамы 1 снабжена горизонтальной направляющей 6, в которой установлена тяга 7. На вертикальных полках рамы 1 установлены с возможностью перемещения и фиксации дополнительные . рабочие элементы 8 для контакта с выемками грузов 9. Механизм 10 фиксации положения захватных органов 3 включает рейку 11, жестко закрепленную на конце тяги 7. Над рейкой 11 установлена с возможностью поворота подпружиненная пружиной 12 поворот- ;Ная планка 13 с зубцами для взаимодействия с рейкой, в верхней части которой имеется рукоять 14, а на конце рейки рукоять 15, которые позволяют настроить грузозахватное устройство на заданный размер. Нижняя часть поворотной планки 13 связана пружиной 16 с рамой 1.
В верхней части рамы 1 установлена ось 17, на которой закреплены концы троса 18. Трос 18 пропущен через блок 19, установленный в верхней части захватного органа 3, и через блок 20 траверсы 21. На раме 1 жестко закреп(Л
4
О Од О)
;о со
14
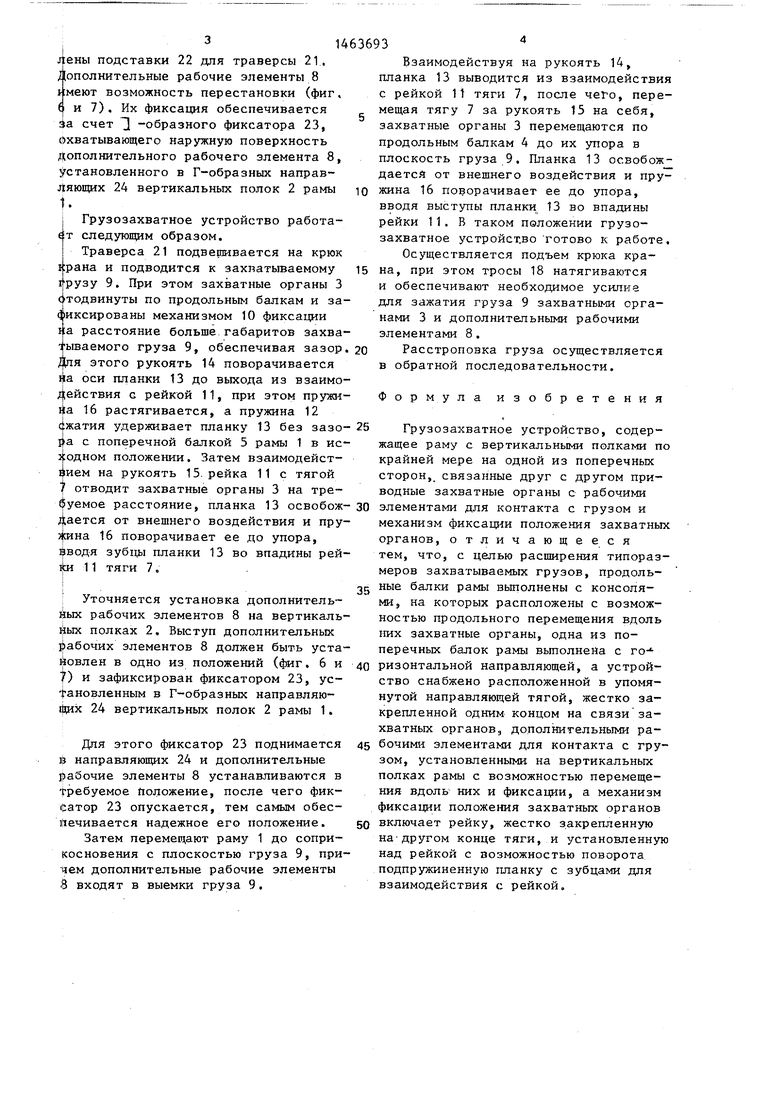
лены подставки 22 для траверсы 21. Дополнительные рабочие элементы 8 имеют возможность перестановки (фиг, ( и 7). Их фиксация обеспечивается а счет 3 -образного фиксатора 23, йхватывающего наружную поверхность Дополнительного рабочего элемента 8, остановленного в Г-образных направ- Ляюгщк 24 вертикальных полок 2 рамы 1.
Грузозахватное устройство работа- |т следующим образом.
Траверса 21 подвешивается на крюк 1:рана и подводится к захватываемому 1 рузу 9. При этом захватные органы 3 С1тодвинуты по продольным балкам и зафиксированы механизмом 10 фиксации на расстояние больше габаритов захватываемого груза 9, обеспечивая зазор я этого рукоять 14 поворачивается оси планки 13 до выхода из взаимо ействия с рейкой 11, при этом пружи lia 16 растягивается, а пружина 12 с;жатия удерживает планку 13 без зазо
Грузозахватное устройство, соде жащее раму с вертикальными полками крайней мере на одной из поперечны сторон,, связанные друг с другом пр водные захватные органы с рабочими
ра с поперечной балкой 5 рамы 1 в ис- 5:одном положении, Затем взаимодейст- пием на рукоять 15. рейка 11 с тягой
( отводит захватные органы 3 на
Дуемое расстояние, планка 13 освобож- ЗО элементами для контакта с грузом и Дается от внешнего воздействия и пру- й|сина 16 поворачивает ее до упора, водя зубцы планки 13 во впадины рей- и 11 тяги 7,
механизм фиксации положения захват органов, отличающееся тем, что, с целью расширения типор меров захватываемых грузов, продол
I Уточняется установка дополнитель- Йых рабочих элементов 8 на вертикаль- фых полках 2, Выступ дополнительных 1| абочих элементов 8 должен быть уста- Йовлен в одно из положений (фиг, 6 и 7) и зафиксирован фиксатором 23, установленным в Г-образных направляю- 1|щх 24 вертикальных полок 2 рамы 1,
Для этого фиксатор 23 поднимается и направляющих 24 и дополнительные рабочие элементы 8 устанавливаются в требуемое Положение, после чего фик- фатор 23 опускается, тем самым обес- 1 1ечивается надежное его положение.
Затем перемещают раму 1 до соприкосновения с плоскостью груза 9, при- нем дополнительные рабочие элементы S входят в выемки груза 9,
Взаимодействуя на рукоять 14, планка 13 выводится из взаимодействия с рейкой И тяги 7, после чет-о, перемещая тягу 7 за рукоять 15 на себя, захватные органы 3 перемещаются по продольным балкам 4 до их упора в плоскость груза 9. Планка 13 освобож- даетсй от внешнего воздействия и пружина 16 поворачивает ее до упора, вводя выступы планки 13 во впадины рейки 11. В таком положении грузозахватное устройство ГОТОВО к работе.
Осуществляется подъем крюка крана, при этом тросы 18 натягиваются и обеспечивают необходимое усилие для зажатия груза 9 захватными органами 3 и дополнительными рабочими элементами 8,
Расстроповка груза осуществляется в обратной последовательности.
Фор м у ла изобретения
Грузозахватное устройство, содержащее раму с вертикальными полками по крайней мере на одной из поперечных сторон,, связанные друг с другом приводные захватные органы с рабочими
элементами для контакта с грузом и
элементами для контакта с грузом и
механизм фиксации положения захватных органов, отличающееся тем, что, с целью расширения типоразмеров захватываемых грузов, продольные балки рамы вьтолнены с консолями, на которых расположены с возможностью продольного перемещения вдоль них захватные органы, одна из поперечных балок рамы вьтолнена с горизонтальной направляющей, а устройство снабжено расположенной в упомянутой направляющей тягой, жестко закрепленной одним концом на связи захватных органов, дополнительными рабочими элементами для контакта с грузом, установленными на вертикальных полках рамы с возможностью перемещения вдоль них и фиксации, а механизм фиксации положения захватных органов
включает рейку, жестко закрепленную на-другом конце тяги, и установленную над рейкой с возможностью поворота подпружиненную гшанку с зубцами для взаимодействия с рейкой.
fas. /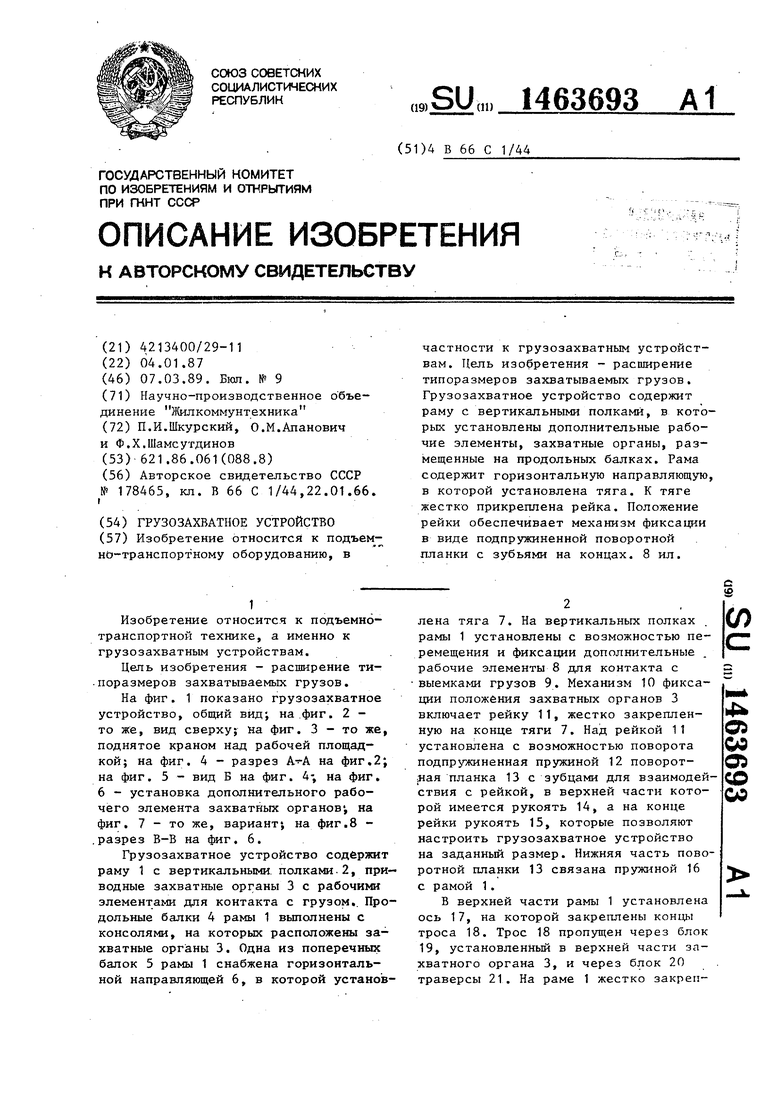
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Захватное устройство для листовыхМАТЕРиАлОВ | 1979 |
|
SU850546A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Захватное устройство | 1986 |
|
SU1493586A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Грузозахватное устройство | 1987 |
|
SU1477654A1 |



Изобретение относится к подъем- нь-транспортному оборудованию, в частности к грузозахватным устройствам. Цель изобретения - расширение типоразмеров захватываемых грузов. Грузозахватное устройство содержит раму с вертикальными полками, в которых установлены дополнительные рабочие элементы, захватные органы, размещенные на продольных балках. Рама содержит горизонтальную направляющую, в которой установлена тяга. К тяге жестко прикреплена рейка. Положение рейки обеспечивает механизм фиксации в виде подпружиненной поворотной планки с зубьями на концах. 8 ил.
аг. 2
21 20
19
Фиг.З
А-А
22
15
фиг.
Ж &идб
15
X
J6
фиг. 5
23
Фиг. 6
Шuг.
i
(Риг.в
| АВТОМАТИЧЕСКИЙ ЗАХВАТ | 0 |
|
SU178465A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
