Известны автоматические захваты, содержащие раму с поворотными относительно ее осей захватными рычагами и подвижную в вертикальном направлении относительно этой рамы траверсу, связанную с рычагами для приведения их в действие и с рамой через механизм фиксации, поддерживающий рычаги раскрытыми, когда поднят порожний захват, и предотвращающий их произвольное раскрытие при транспортировании захвата с грузом,
В отличие от известных захватов такого типа предложенный захват может одновременно поднимать и транспортировать несколько грузов разной длины. Необходимость в этом существует, например, на заводах железобетонных изделий при групповом захвате по торцам перемычек, ступенек, бордюрных камней, имеющих определенные допуски на отклонения по длине, а также на карьерах при захвате пакетов камней в виде кубиков, выпиленных из известняка и имеющих различную длину.
С этой целью захват снабжен по меньшей мере двумя парами захватных рычагов. Каждая пара противоположно расположенных рычагов имеет прижимные пластины различной длины, с соотношением примерно 1 : 2. Каждый рычаг может индивидуально прижиматься к грузу. Для этого траверса сделана балансирной, рычаги соединены с ней при помощи тросов, огибающих блоки, которые закреплены на траверсе и на рычагах с пластинами большей длины, а рама имеет стойки длиной, большей длины захватных плеч рычагов, что обеспечивает возможность свободного поворота этих рычагов при опущенном захвате относительно осей, являющихся продольными сторонами рамы.
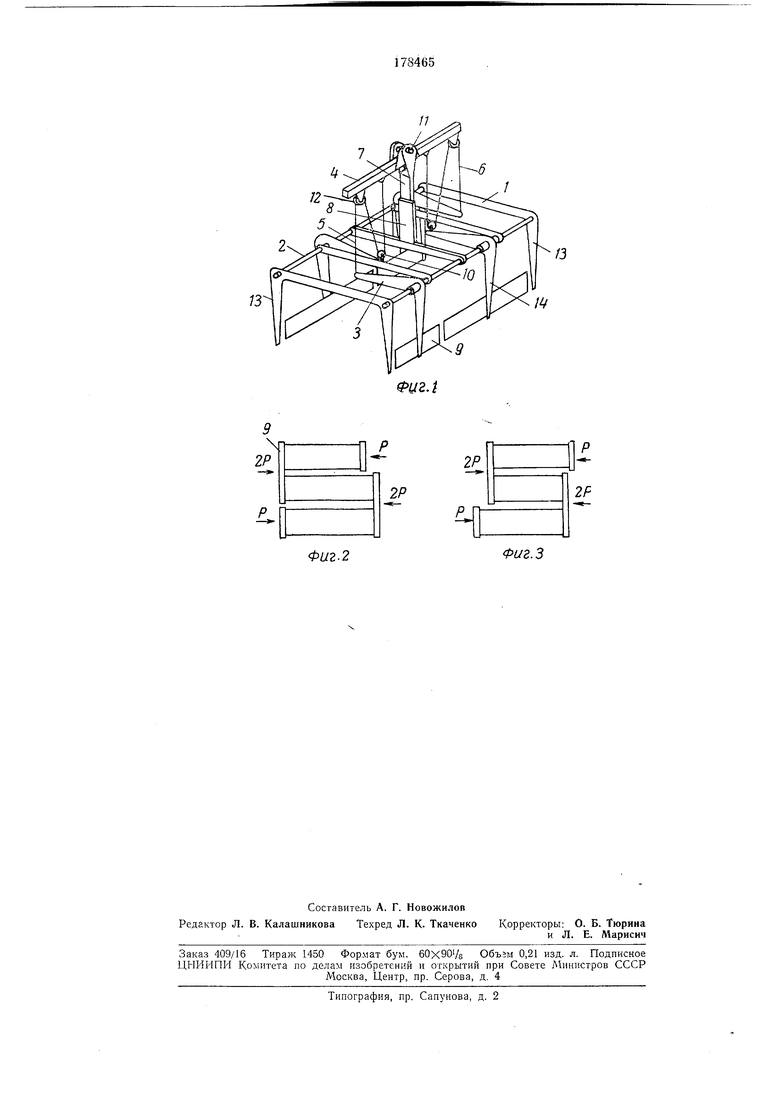
На фиг. 1 изображен автоматический захват, общий вид; на фиг. 2 и 3 - схемы захватывания грузов различной длины.
Захват состоит из рамы 1, поворотных относительно ее осей 2 захватных рычагов 3 и подвижной относительно рамы в вертикальном направлении траверсы 4. Последняя связана при помощи тросов 5 и 6 с рычагами и через механизм фиксации - с рамой.
Механизм фиксации применен известного типа, например по авт. св. N° 109523, и состоит из ползуна 7 с упором и обоймы 8 с поворотной звездочкой, взаимодействующей с упором ползуна. В стенке обоймы сделана прорезь, в которую заходит зуб звездочки, предотвращая перемещение ползуна относительно обоймы и тем самым фиксируя захватные рычаги в раскрытом или закрытом положении.
На верхнем конце рычагов с длинными пластинами смонтированы блоки 10. Траверса подвешивается к крюку крана посредством шарнира 11 и соединена с ползуном. По концам траверсы установлены блоки 12, через которые перекинут трос, соединяющий конец рычага, имеющего короткую пластину, с траверсой.
Таким образом, через конец рычага с длинной пластиной проходят две ветви троса, что обеспечивает удвоенные усилия (2Р на рычаг по принципу полиспаста. Стойки 13 рамы длиннее плеч 14 рычагов, и последние могут свободно поворачиваться относительно осей 2.
При опускании захвата на груз ползун, взаимодействуя посредством упора со звездочкой, выходит ,из зацепления с обоймой, затем, при подъеме, тросы, воздействуя на концы рычагов, поворачивают их. Пластины при этом прижимаются к грузу, захватывают его и перемещают. После опускания груза ползун, продолжая опускаться, входит в зацепление со звездочкой обоймы. При подъеме захвата ползун уже не сможет перемещаться, поэтому рычаги останутся неподвижными, что позволит вывести их из взаимодействия с грузом.
Предмет изобретения
Автоматический захват, содержащий раму с поворотными относительно ее осей захватными рычагами и подвижную в вертикальном направлении относительно этой рамы траверсу, связанную с рычагами для приведения их в действие и с рамой через механизм фиксации, обеспечивающий раскрытое положение рычагов, когда поднят порожний захват, и предотвращающий произвольное их раскрытие при транспортировании захвата с грузом, отличающийся тем, что, с целью обеспечения одновременного подъема и транспортирования нескольких грузов разной длины, он снабжен по меньщей мере двумя парами захватных рычагов, из которых каждая пара противоположно расположенных рычагов имеет различные по длине, с соотнощением примерно 1 :2, прижимные пластины, и каждый рычаг может индивидуально прижиматься к грузу, для чего траверса выполнена балансирной, рычаги соединены с ней с помощью тросов, огибающих блоки, закрепленные на траверсе и на рычагах с пластинами большей длины, а рама имеет стойки длиной больще длины захватных плеч рычагов, что обеспечивает свободный поворот этих рычагов при опущенном захвате относительно упомянутых осей, являющихся продольными сторонами рамы.
/2

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов | 1979 |
|
SU839981A1 |
| Грузозахватное устройство | 1982 |
|
SU1129165A1 |
| МЕХАНИЗМ ФИКСАЦИИ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1992 |
|
RU2035380C1 |
| Клещевой захват | 1977 |
|
SU703467A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2014 |
|
RU2570128C1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2013 |
|
RU2518792C1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Автоматическое захватное устройство | 1982 |
|
SU1030298A1 |
| Захватное устройство | 1990 |
|
SU1792908A1 |
Чт
2Р
Фиг.2
2Р
2Р
Фиг.З
