ff /7
т
- /5
/
/
ff
/
о:
СП 1C
00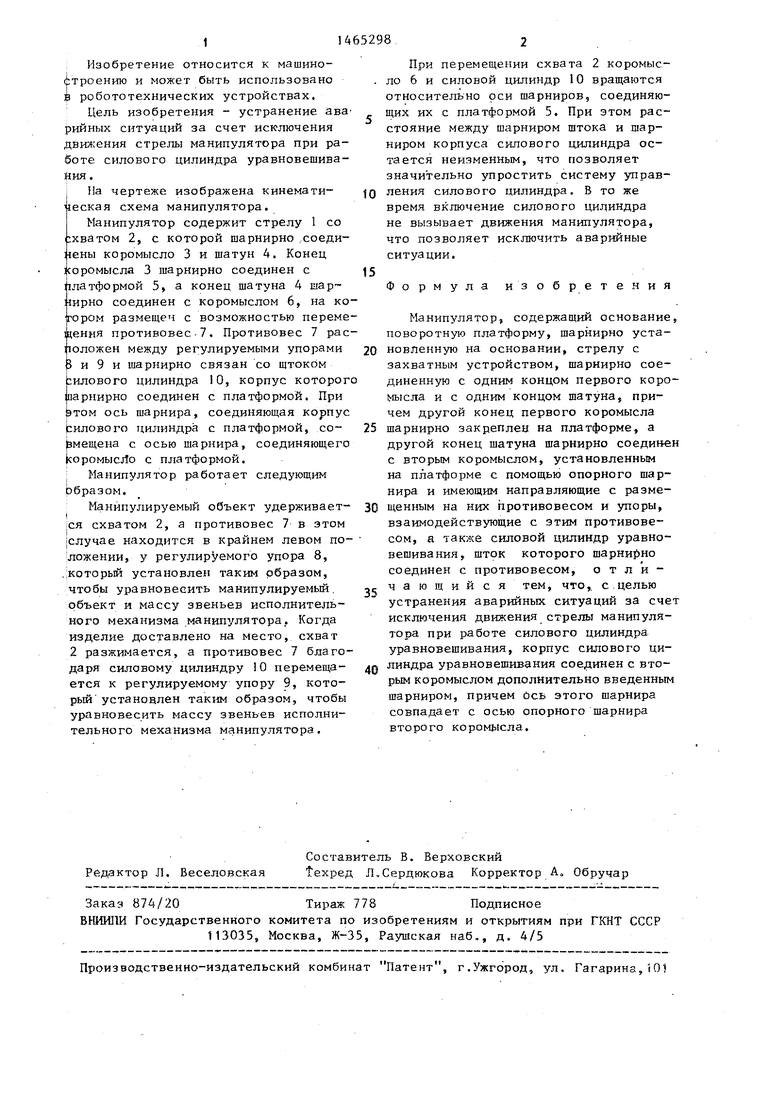
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU795934A1 |
| Манипулятор | 1988 |
|
SU1684021A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор | 1987 |
|
SU1430258A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| Кран-манипулятор | 1989 |
|
SU1634624A1 |
| Манипулятор | 1988 |
|
SU1537518A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| Манипулятор для загрузки-разгрузки технологических машин | 1987 |
|
SU1445943A1 |
Изобретение относится к машиностроению и может быть использовано в робототехнических устройствах. Цель изобретения - устранение аварий- ных ситуаций за счет исключения движенин манипулятора при работе силового цилиндра уравновешивания, Манипу- лируемьй объект удерживается схватом 2 а противовес 7 в этом случае находится в крайнем левом положении, у регулируемого упора 8, который установлен таким образом, чтобы уравновесить манипулируемый объект и массу звеньев исполнительного механизма манипулятора. Когда изделие доставлено на место, схват 2 разжимается, а противовес благодаря силовому цилиндру 10 перемещается к регулируемому упору 9. Включение силового цилиндра 10 не вызывает движений манипулятора, 1 ил.
//////////
Изобретение относится к машино- фтроению и может быть использовано i робототехнических устройствах.
Цель изобретения - устранение авв рийных ситуаций за счет исключения двиясения стрелы манипулятора при работе силового цилиндра уравновешивания .
i На чертеже изображена кинемати- еская схема манипулятора, I Манипулятор содержит стрелу 1 со рхватом 2, с которой шарнирно ,соеди- lieHbi коромысло 3 и шатун 4, Конец |соромысла 3 шарнирно соединен с 1латформой 5, а конец шатуна 4 шар- iiHpHO соединен с коромыслом 6, на ко jropOM размещен с возможностью переме |{енця противовес.. Противовес 7 рас оложен между регулируемыми упорами $ и 9 и шарнирно связан со штоком Ьилового цилиндра 10, корпус которог рарнирно соединен с платформой. При том ось шарнира, соединяющая корпус Силового цилиндра с платформой, со- |вмещена с осью шарнира, соединяющего |соромысЛо с платформой. ; Манипулятор работает следующим образом. Манипулируемый объект удерживаетj
|ся схватом 2, а противовес 7 в этом случае находится в крайнем левом по- :ложении, у регулируемого упора 8, .которьй установлен таким образом, чтобы уравновесить манипулируемый. объект и массу звеньев исполнительного механизма манипулятора. Когда изделие доставлено на место, схват 2 разжимается, а противовес 7 благодаря силовому цилиндру 10 перемещается к регулируемому упору 9, который установлен таким образом, чтобы уравновесить массу звеньев исполнительного механизма манипулятора.
При перемещении схвата 2 коромысло 6 и силовой цилиндр 10 вращаются относительно оси шарниров, соединяющих их с платформой 5, При этом расстояние между шарниром штока и шарниром корпуса силового цилиндра остается неизменным, что позволяет значительно упростить систему управления силового цилиндра. В то же время включение силового цилиндра не вызывает движения манипулятора, что позволяет исключить аварийные ситуации.
Формула изобретения
0
0
Манипулятор, содержащий основание, поворотную платформу, шарнирно установленную на основании, стрелу с захватным устройством, шариирно соединенную с одним концом первого коромысла и с одним концом шатуна, причем другой конец первого коромысла 5 шарнирно закреплен на платформе, а другой конец шатуна шарнирно соединен с вторым коромыслом, установленным на платформе с помощью опорного щар- нира и имеющим направляющие с размещенным на них противовесом и упоры, взаимодействующие с этим противовесом, а также силовой цилиндр уравновешивания, шток которого шарнирно соединен с противовесом, отличающийся тем, что,, с.целью устранения аварийных ситуаций за счет исключения движения стрелы манипулятора при работе силового цилиндра уравновешивания, корпус силового цилиндра уравновешивания соединен с вторым коромыслом дополнительно введенным шарниром, причем Ось этого шарнира совпадает с осью опорного шарнира второго коромь сла.
5
0
| Манипулятор | 1979 |
|
SU795934A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
