з15375184
ется благодаря кинематической связи тель перемещается в направляющих 28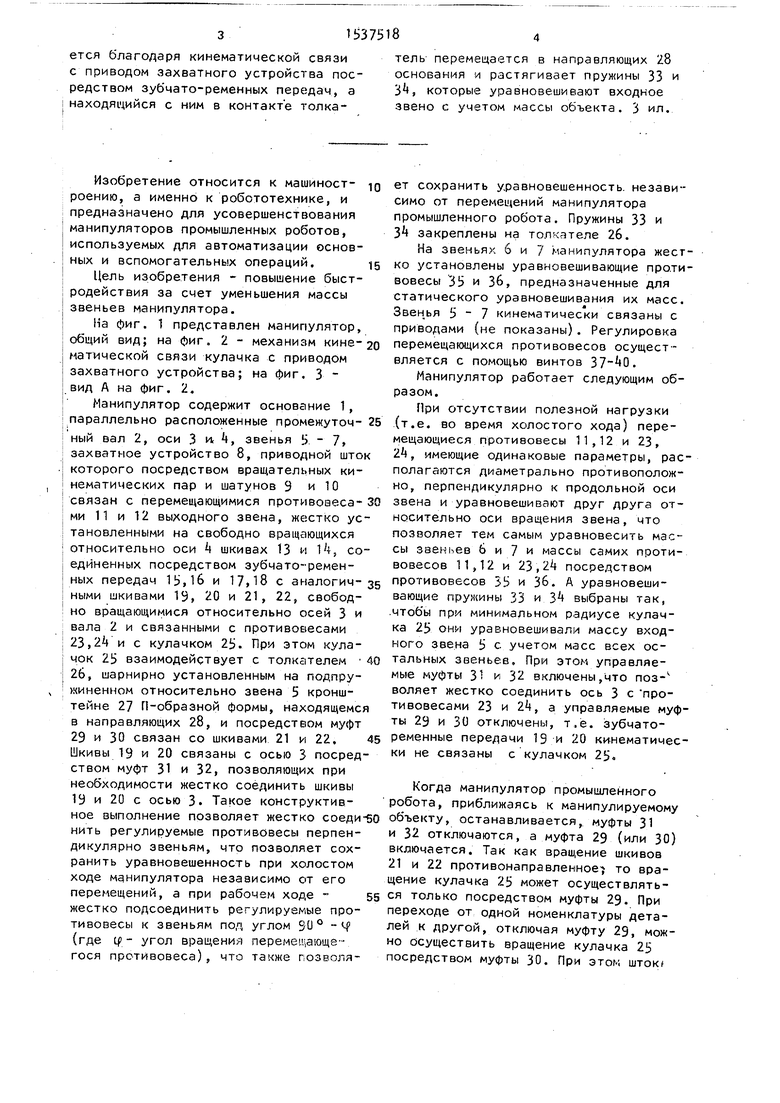
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1430258A1 |
| Манипулятор | 1987 |
|
SU1509245A1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Устройство для свинчивания деталей | 1981 |
|
SU973287A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Установка для дробеструйной обработки полых цилиндрических изделий | 1986 |
|
SU1366376A1 |
| ПОЧВООБРАБАТЫВАЮЩАЯ ФРЕЗА | 2009 |
|
RU2419269C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ГРАНЕЙ АЛМАЗА СЛОЖНОЙ МОРФОЛОГИЧЕСКОЙ ФОРМЫ | 2001 |
|
RU2203795C2 |
| Устройство для создания сложного пространственного движения | 1990 |
|
SU1782674A1 |
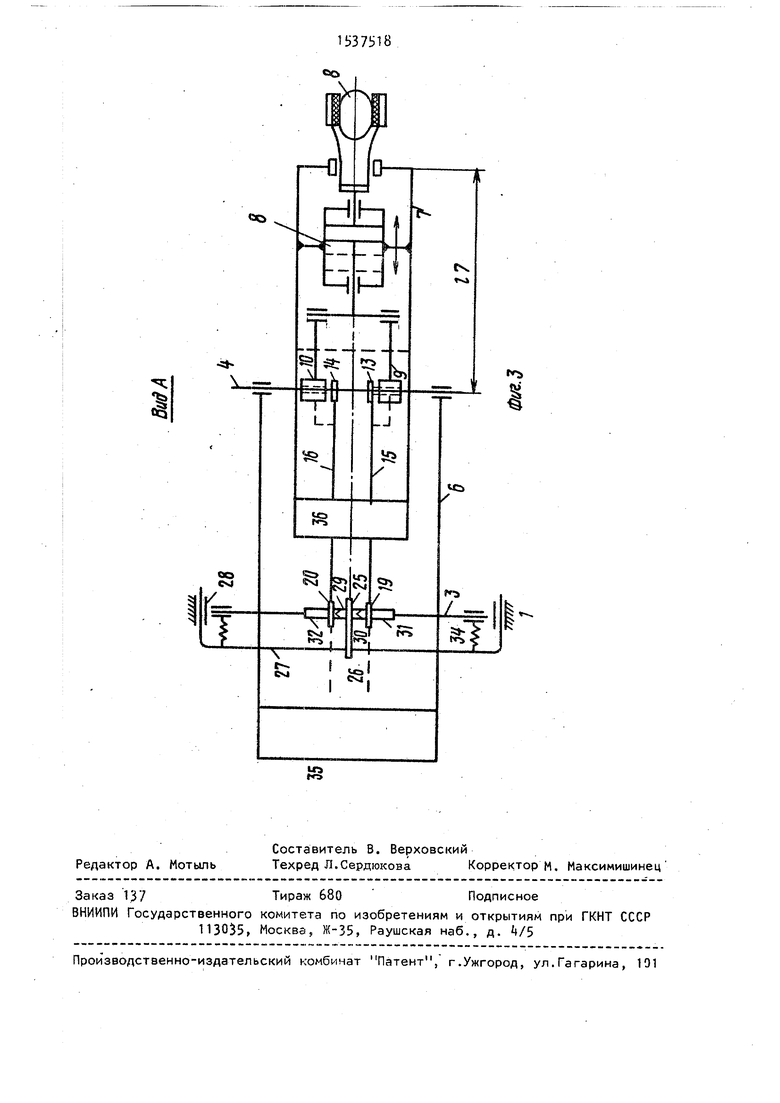
Изобретение относится к области машиностроения, а именно к робототехнике и предназначено для усовершенствования манипуляторов. Цель изобретения - повышение быстродействия за счет уменьшения массы звеньев манипулятора. Манипулятор содержит основания 1, шарнирно соединенные друг с другом звенья 5 - 7 и захватное устройство 8 с приводом. При отсутствии полезной нагрузки звенья манипулятора уравновешены противовесами 11, 12, 23, 24, 35, 36, а входное звено 5 - пружинами 33 и 34. Пружины 33 и 34 кинематически связывают звено 5 манипулятора с толкателем, находящимся в направляющих 28 основания. При этом управляемая муфта 29 отключена. После захвата объекта захватным устройством шток его привода перемещается, одновременно включается управляемая муфта 29, с одной из полумуфт которой жестко связан кулачок. Кулачок 25 поворачивается благодаря кинематической связи с приводом захватного устройства посредством зубчато-ременных передач, а находящийся с ним в контакте толкатель перемещается в направляющих 28 основания и растягивает пружины 33 и 34, которые уравновешивают входное звено с учетом массы объекта. 3 ил.
с приводом захватного устройства посредством зубчато-ременных передач, а находящийся с ним в контакте толка10
15
Изобретение относится к машиностроению, а именно к робототехнике, и предназначено для усовершенствования манипуляторов промышленных роботов, используемых для автоматизации основных и вспомогательных операций.
Цель изобретения - повышение быстродействия за счет уменьшения массы звеньев манипулятора.
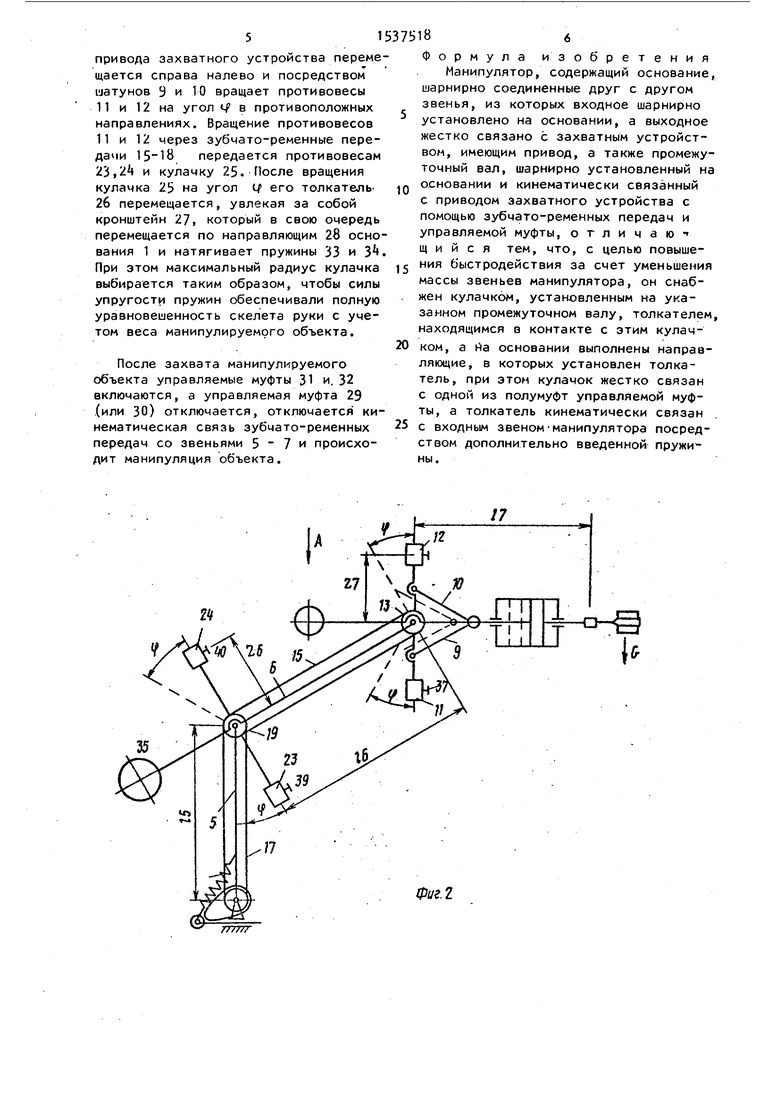
На фиг. 1 представлен манипулятор, общий вид; на фиг. 2 - механизм кине-20 матической связи кулачка с приводом захватного устройства; на фиг. 3 вид А на фиг. 2.
Манипулятор содержит основание 1, параллельно расположенные промежуточ- 25
ный вал 2, оси 3 и, , звенья 5 - 7, захватное устройство 8, приводной шток которого посредством вращательных кинематических пар и шатунов 9 и 10 связан с перемещающимися противовеса- 30 ми 11 и 12 выходного звена, жестко установленными на свободно вращающихся относительно оси k шкивах 13 и 1, соединенных посредством зубчато-ременных передач 15,16 и с аналогич-35 ными шкивами 19, 20 и 21, 22, свободно вращающимися относительно осей 3 и вала 2 и связанными с противовесами 23,2 и с кулачком 25. При этом кулачок 25 взаимодействует с толкателем 40 26, шарнирно установленным на подпружиненном относительно звена 5 кронштейне 27 П-образной формы, находящемся в направляющих 28, и посредством муфт 29 и 30 связан со шкивами 21 и 22. 4 Шкивы 19 и 20 связаны с осью 3 посредством муфт 31 и 32, позволяющих при необходимости жестко соединить шкивы 19 и 20 с осью 3. Такое конструктивное выполнение позволяет жестко соединю нить регулируемые противовесы перпендикулярно звеньям, что позволяет сохранить уравновешенность при холостом ходе манипулятора независимо от его перемещений, а при рабочем ходе - жестко подсоединить регулируемые противовесы к звеньям пол углом 90 ° Ч (где tf - угол вращения перемещающегося противовеса), что также позволя5
основания и растягивает пружины 33 и 3, которые уравновешивают входное звено с учетом массы объекта. 3 ил.
0
5
0
25
30 3540 45 ню
55
ет сохранить уравновешенность, независимо от перемещений манипулятора промышленного робота. Пружины 33 и 3k закреплены на толкателе 26.
На звеньях 6 и 7 манипулятора жестко установлены уравновешивающие противовесы 35 и 36, предназначенные для статического уравновешивания их масс. Звенья 5 - 7 кинематически связаны с приводами (не показаны). Регулировка перемещающихся противовесов осуществляется с помощью винтов .
Манипулятор работает следующим образом.
При отсутствии полезной нагрузки (т.е. во время холостого хода) перемещающиеся противовесы 11,12 и 23, 2k, имеющие одинаковые параметры, располагаются диаметрально противоположно, перпендикулярно к продольной оси звена и уравновешивают друг друга относительно оси вращения звена, что позволяет тем самым уравновесить массы звеньев 6 и 7 и массы самих противовесов 11,12 и 23,24 посредством противовесов 35 и 36. А уравновешивающие пружины 33 и 3 выбраны так, .чтобы при минимальном радиусе кулачка 25 они уравновешивали массу входного звена 5 с учетом масс всех остальных звеньев. При этом управляемые муфты 31 и 32 включены,что поз- воляет жестко соединить ось 3 с противовесами 23 и 2k, а управляемые муфты 29 и 30 отключены, т.е. зубчато- ременные передачи 19 и 20 кинематически не связаны с кулачком 25.
Когда манипулятор промышленного робота, приближаясь к манипулируемому объекту, останавливается, муфты 31 и 32 отключаются, а муфта 29 (или 30) включается. Так как вращение шкивов 21 и 22 противонаправленное то вращение кулачка 25 может осуществляться только посредством муфты 29. При переходе от одной номенклатуры деталей к другой, отключая муфту 29, можно осуществить вращение кулачка 25 посредством муфты 30. При этом шток
51
привода захватного устройства переме щается справа налево и посредством шатунов 9 и 10 вращает противовесы 11 и 12 на угол Ч в противоположных направлениях. Вращение противовесов 11 и 12 через зубчато-ременные передами 15-18 передается противовесам 23,2 и кулачку 25. После вращения кулачка 25 на угол Ц его толкатель 26 перемещается, увлекая за собой кронштейн 27, который в свою очередь перемещается по направляющим 28 осно вания 1 и натягивает пружины 33 и 3 При этом максимальный радиус кулачка выбирается таким образом, чтобы силы упругости пружин обеспечивали полную уравновешенность скелета руки с учетом веса манипулируемого объекта.
После захвата манипулируемого объекта управляемые муфты 31 и 32 включаются, а управляемая муфта 29 (или 30) отключается, отключается кинематическая связь зубчато-ременных передач со звеньями 5 7 и происходит манипуляция объекта.
УП Ш
375186
Формула изобретения Манипулятор, содержащий основание, шарнирно соединенные друг с другом звенья, из которых входное шарнирно
установлено на основании, а выходное жестко связано с захватным устройством, имеющим привод, а также промежуточный вал, шарнирно установленный на
,Q основании и кинематически связанный с приводом захватного устройства с помощью зубчато-ременных передач и управляемой муфты, отличаю- щ и и с я тем, что, с целью повыше1$ ния быстродействия за счет уменьшения массы звеньев манипулятора, он снабжен кулачком, установленным на указанном промежуточном валу, толкателем, находящимся в контакте с этим кулачком, а на основании выполнены направляющие, в которых установлен толкатель, при этом кулачок жестко связан с одной из полумуфт управляемой муфты, а толкатель кинематически связан с входным звеном-манипулятора посредством дополнительно введенной пружины.
20
25
Фаг 2
I
