со о to
СП
00
Изобретение относится к машиностроению, а именно к робототехнике, и предназначено для усовершенствования механических рук промышленных роботов, используемых для автоматизации основных и вспомогательных операций.
Целью изобретения является повышение точности позиционирования за счет автоматической настройки механизма уравновешивания на вес груза.
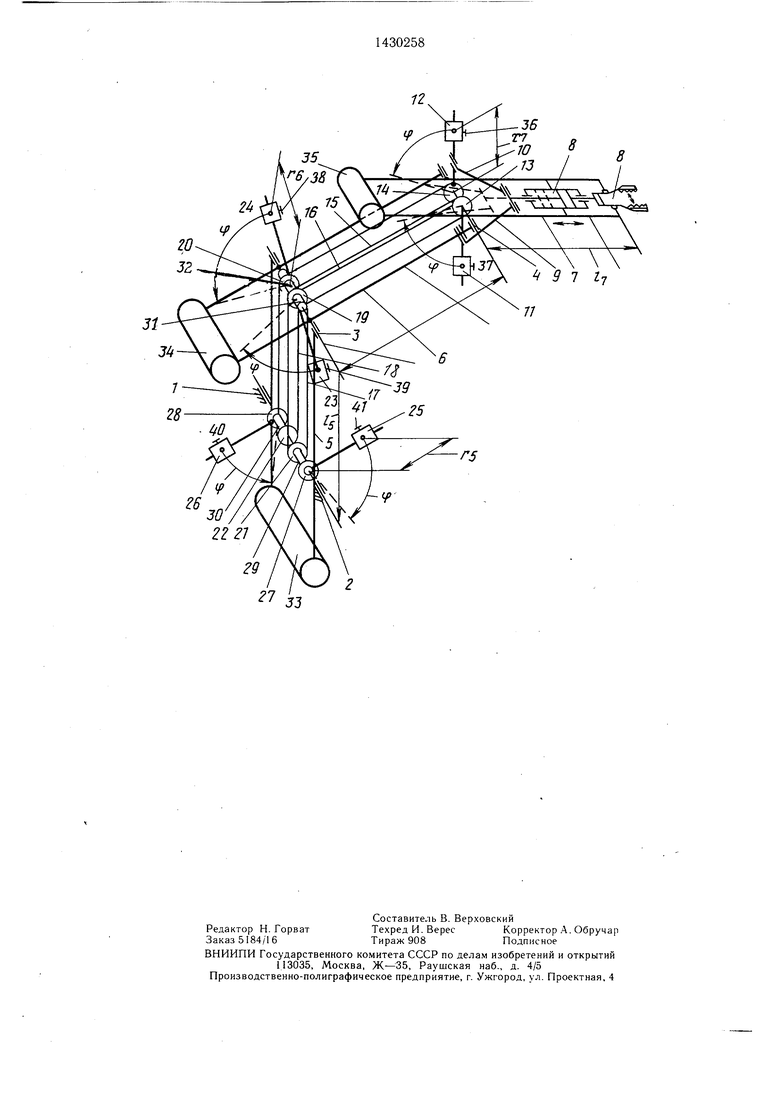
На чертеже представлена кинематическая схема манипулятора.
Манипулятор содержит основание 1, параллельно расположенные оси 2-4 вращательных кинематических пар звеньев 5-7 скелета руки, а также захват 8, приводной шток которого посредством вращательных кинематических пар и щатунов 9 и 10 связан с перемещающимися противовесами 11 и 12 конечного звена, жестко установленными на свободно вращающихся относительно оси 4 шкивах 13 и 14, соединенных посредством зубчато-ременных передач 15-18 с аналогичными шкивами 19-22, свободно вращающимися относительно осей 3 и 2 и связанными с противовесами 23-26. При этом противовесы 25 и 26 связаны со шкивами 21 и 22 посредством дисков 27 и 28 и муфт 29 и 30, а шкивы 19 и 20 связаны с осью 3 посредством муфт 31 и 32, позволяющих при необходимости жестко соединить щки- вы 19 и 20 с осью 3. Такой подход позволяет жестко соединить регулируемые противовесы перпендикулярно звеньям, что дает возможность сохранить уравновешенность при холостом ходе скелета ру ки независимо от его перемещений, а при рабочем ходе - жестко подсоединить регулируемые противовесы к звеньям под углом (90°-ф), что также позволяет сохранить уравновешенность независимо от перемещений скелета манипулятора.
На звеньях 5-7 скелета руки жестко установлены уравновешивающие противовесы 33-35, предназначенные для статического уравновешивания их масс. Звенья 5-7 скелета кинематически связаны с приводами (не пока заны). Регулировка перемещающихся противовесов осуществляется с помощью винтов 36-41.
Манипулятор работает следующим образом.
При отсутствии полезной нагрузки (т. е. во время холостого хода) каждая из пар перемещающихся противовесов 11 -12, 23- 24, 25-26, имеющих одинаковые параметры и установленные на каждом звене руки, рас5
5
полагается диаметрально противоположно, перпендикулярно к продольной оси звена и уравновешивает друг друга относительно феи вращения звена, позволив тем самым г уравновесить массы звеньев 5-7 скелета руки и массы перемещающихся пар противовесов 11 -12, 23-24 и 25-26 посредством противовесов 33-35. При этом муфты 31 и 32 включены, что позволяет жестко соединить ось 3 с противовесами 23 и 24, а муф0 ты 29 и 30 отключены и зубчато-ременные передачи 19 и 20 кинематически не связаны с противовесами 25 и 26. Когда манипулятор, приближаясь к манипулируемому объекту, останавливается, муфты 31 и 32 отключаются, а муфты 29 и 30 включаются. При этом одновременно для сближения губок захвата приводной щток захвата перемещается спра- ва налево и посредством шатунов 9 и 10 вращает противовесы 11 и 12 на угол ф в противоположных направлениях. Вращение
0 противовесов 11 и 12 через зубчато-ременные передачи 15, 16 и 17, 18 передается противовесам 23, 24 и 25, 26, которые также поворачиваются на угол ф (положения противовесов после вращения показаны штриховыми линиями).
После захвата манипулируемого объекта муфты 31 и 32 включаются, а муфты 29 и 30 отключаются, отключив кинематическую связь зубчато-ременных передач со звеньями 5-7 во время рабочего хода промыш ленного робота.
Формула изобретения
Манипулятор, содержащий основание, звенья и захватное устройство с приводом, соединенные друг с другом шарнирами, а также механизм уравновещивания, имеющий противовесы, установленные по два на промежуточных валах, образующих реи шарниров, отличающийся тем, что, с целью повы- щения точности позиционирования за счет
0 автоматической настройки механизма уравновешивания на вес груза, он снабжен шар- нирно-рычажным механизмом, имеющим входное и выходное звенья, смонтированным на захватном устройстве и щарнирно соединенным с его приводом указанным входным звеном, зубчато-ременной передачей, щкивы которой установлены щарнирно на промежуточных валах, а один щкив жестко связан с выходным звеном щарнирно-рычаж- ного механизма, и электромагнитными муфQ тами по числу противовесов, при этом полумуфты каждой муфты жестко закреплены соответственно на противовесе и на шкиве.
5
5
гв
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1537518A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| Манипулятор | 1987 |
|
SU1509245A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Манипулятор | 1980 |
|
SU908589A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
Изобретение относится к машиностроению, а и.менно к робототехнике, и предназначено для усовершенствования механических рук промышленных роботов. Целью изобретения является повышение точности позиционирования за счет автоматической настройки механизма уравновешивания на вес груза. При отсутствии полезной нагрузки каждая из пар перемещающихся противовесов 11 и 12, 23 и 24, 25 и 26 располагается диаметрально противоположно. Когда манипулятор, приближаясь к объекту, останавливается, муфты 31 и 32 отключаются, а муфты 29 и 30 включатся. При этом шток привода захвата посредством шатунов 9 и 10 вращает противовесы 11 и 12 в противоположных направлениях. Вращение противовесов 11 и 12 через зубчато-ременные передачи 15, 16, 17 и 18 передается противовесам 23, 24, 25 и 26. После захвата объекта муфты 31 и 32 отключаются. ил.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
