(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1465298A1 |
| Манипулятор | 1983 |
|
SU1098784A1 |
| Загрузочное устройство | 1985 |
|
SU1301629A1 |
| Манипулятор | 1984 |
|
SU1283087A1 |
| Манипулятор | 1982 |
|
SU1148776A1 |
| Манипулятор | 1983 |
|
SU1151450A1 |
| Манипулятор | 1988 |
|
SU1684021A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Промышленный робот | 1983 |
|
SU1127766A1 |
| Манипулятор для дозированной загрузки емкости сыпучим материалом | 1985 |
|
SU1281399A1 |
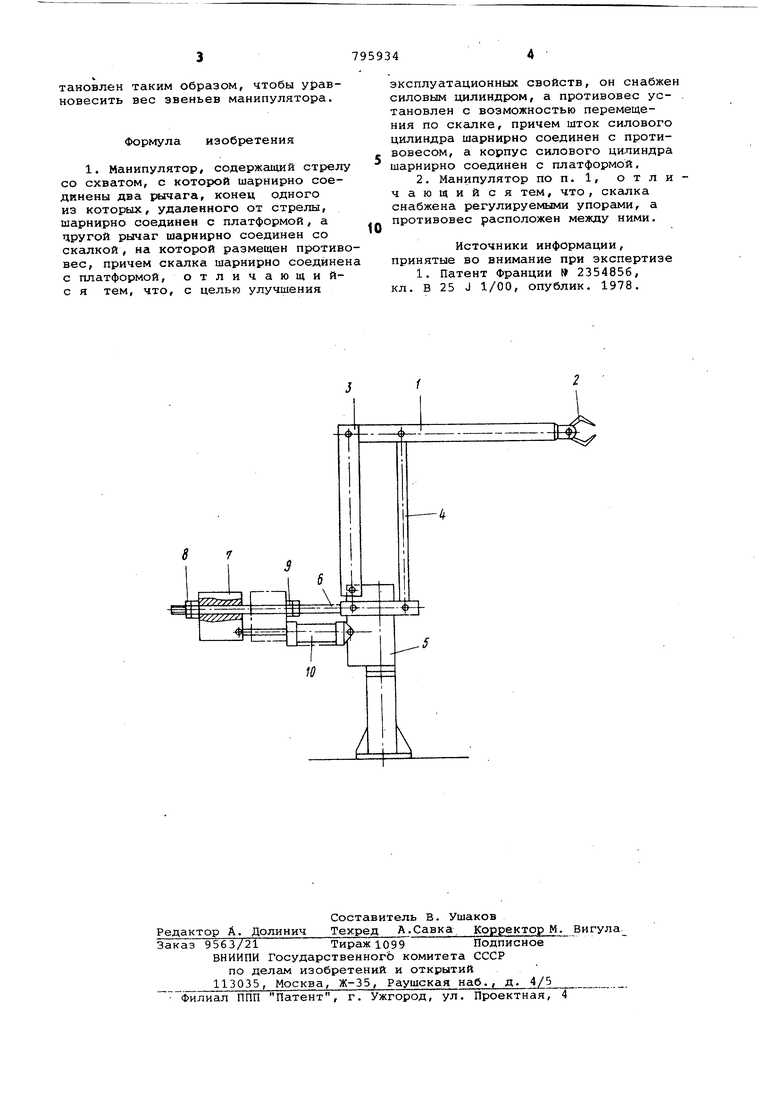
Изобретение относится к машиност роению и может быть использовано в робототехнических устройствах. Известен манипулятор, содержащий стрелу со схватом, с которой шарнир но соединены два рычага, конец одно из которых, удаленного от стрелы, шарнирно соединен с платформой, а другой рычаг шарнирно соединен со скалкой, на которой размещен противовес, причем скалка шарнирно соеди нена с платформой Л1, Недостатком известного устройства является жесткое закрепление противовеса на скалке, что не позволяет уравновешивать манипулятор при изменении веса поднимаемого груза. Это существенно ухудшает зксплуатационные свойства манипулятора. Цель изобретения - улучшение эксплуатационных свойств. Поставленная цель достигается тем, что манипулятор снабжен СИЛОВЬЕ цилиндром, а противовес установлен с возможностью перемещения ,по скалке , причем шток силового цилиндра шарнирно соединен с противовесом, а корпус силового цилиндра шарнирно соединен с платформой. Кроме этого, скалка снабжена регулируемыми упорами, а противовес расположен между ними. На чертеже схематически представлено устройство. Манипулятор содержит стрелу 1 со схватом 2, в которой шарнирно соединены рычаги 3 и 4, конец рычага 3 шарнирно соединен с платформой 5, а конец рычага 4 шарнирно соединен со скалкой 6, на которой размещен с возможностью перемещения противовес 7. Противовес 7 расположен между регулируемыми упорами 8 и 9 и шарнирно связан со штоком силового цилиндра 10, корпус которого шарнирно соединен с платформой 5. Манипулятор работает следующим образом. Поднимаемое изделие удерживается схватом 2, а противовес 7 в этом случае находится в крайнем левом положении у регулируемого упора 8, который установлен таким, образом, чтобы уравновесить поднимаемое изделие и вес звеньев манипулятора. Когда изделие доставлено на место, схват 2 разжимается, противовес 7, благодаря силовому цилиндру 10, переметается к регулируемому упору 9, который установлен таким образом, чтобы уравновесить вес звеньев манипулятора.
Формула изобретения
эксплуатационных свойств, он снабже силовым цилиндром, а противовес установлен с возможностью перемещения по скалке, причем шток силового цилиндра шарнирно соединен с противовесом, а корпус силового цилиндра шарнирно соединен с платформой,
Источники информации, принятые во внимание при экспертизе
