фиг 2
, Изобретение относится к робототехнике, а фочнее к захватным устройствам промыш- ле|1ных роботов.
i Целью изобретения является упрощение конструкции и повышение надежности путем исключения трущихся частей.
На фиг. 1 изображен предлагаемый схват, общий вид; на фиг. 2 - вид А на фиг. 1.
; Схват содержит магнитные системы, рас- по1ложенные в его рабочей зоне, включаю- ш.е катущки 1, охватывающие сердечники 2 i с полюсами 3. В воздущном зазоре между полюсами расположены средние участки 4 токопроводящей упругой ленты, изргнутой в виде петли. Концы ленты закреплены в токопроводящих зажимах 5. К11айние участки 6 ленты зажимают деталь 7. Магнитные системы установлены на общем основании 8. Токоподводы 9 подходят по руке 1Q робота к токопроводящим зажимам 5.
Схват работает следующим образом.
В ИСХОДНОМ состоянии ленты деформиро- естественным образом и участки 6 за|жимают деталь 7 с двух сторон. Робот мфжет переносить деталь в любом направ- л4нии. При подходе к месту позициониро- в4ния средние участки 4 упругих лент по- мфщаются в зазоре между полюсами 3 маг- систем, установленных, например, на цеха. Затем токоподводы 9 и сами ленты подключаются к источнику электрической э}|ергии. Ток, проходя по среднему участку 4 петель, взаимодействует с магнитным
полем, что приводит к деформации всех лент таким образом, что они отходят от детали, освобождая ее.
При отключении тока процесс происходит
. в обратном порядке следующим образом. Ленты обесточиваются, и средние участки 4 петель деформируются в направлении к захватываемой детали, обеспечивая ее захват участками 6 петель. Поскольку цикл захват - освобождение кратковременен, рас0 ход электрической энергии незначителен.
Формула изобретения
Схват робота, содержащий губки, каждая с из которых связана с приводом ее перемещения, выполненным в виде токопроводя- щего элемента, соединенного с источником электрической энергии и расположенного на схвате с возможностью захода между полюсами магнитной системы, установленной в 0 рабочей зоне схвата, отличающийся тем, что, с целью упрощения конструкции и повышения надежности путем уменьшения числа трущихся частей, каждая из губок и токопроводящий элемент ее привода выполнены из упругой токопроводящей ленты, изогнутой в виде петли, средний участок которой расположен с возможностью захода между полюсами магнитной системы, а крайние участки отогнуты к оси схвата с образованием криволинейных поверхностей, при д этом концы ленты закреплены на схвате и соединены с источником электрической энергии.
5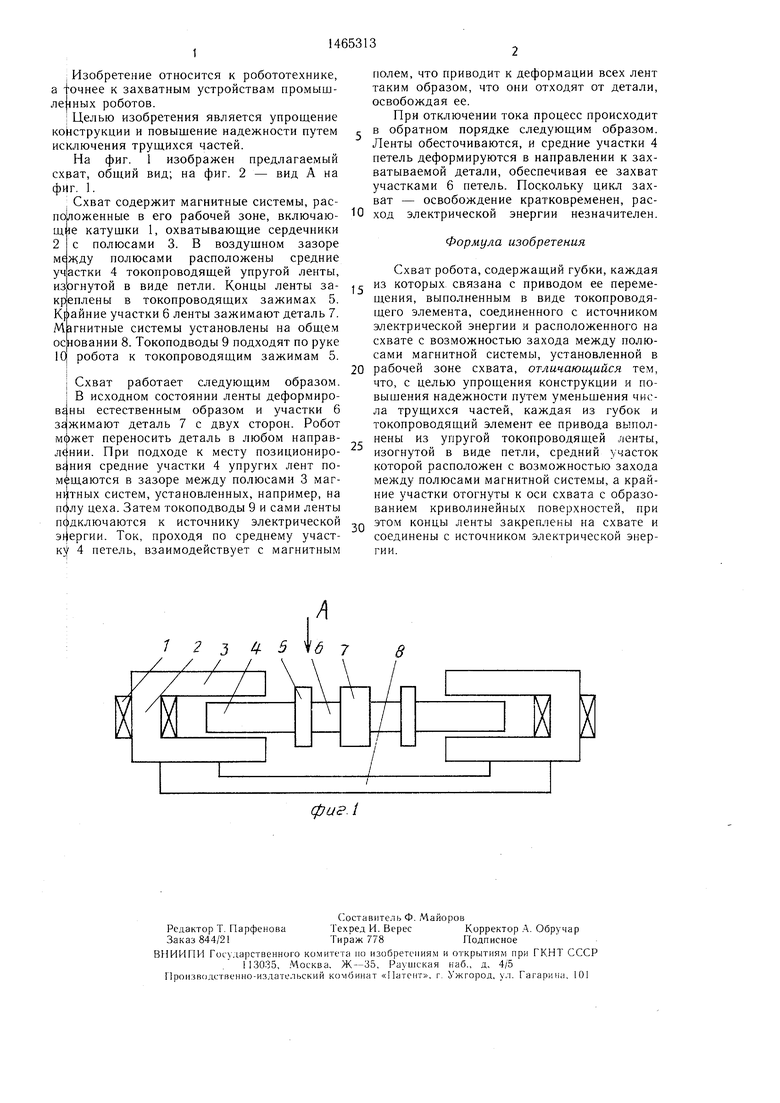
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват манипулятора | 1985 |
|
SU1283095A1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Магнитный схват | 1990 |
|
SU1811484A3 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
Изобретение относится к робототехнике, а точнее к захватным устройствам промышленных роботов. Целью изобретения является упрощение конструкции и повышение надежности путем исключения трущихся частей. В исходном состоянии ленты, изогнутые по форме петель, из упругого токо- проводящего материала зажимают деталь 7 крайними участками 6 этих петель. В этом состоянии происходит перенос детали. При подходе схвата в точку позиционирования средние участки 4 петель заходят в зазоры между полюсами 3 магнитных систем, и при подключении концов лент к источнику электрической энергии происходит взаимодействие средних участков 4, по которым протекает ток, с магнитным полем, создаваемым магнитными системами. В результате этого ленты деформируются и деталь 7 освобождается. Захват детали происходит при обес- точивании лент за счет упругой их деформации. 2 ил.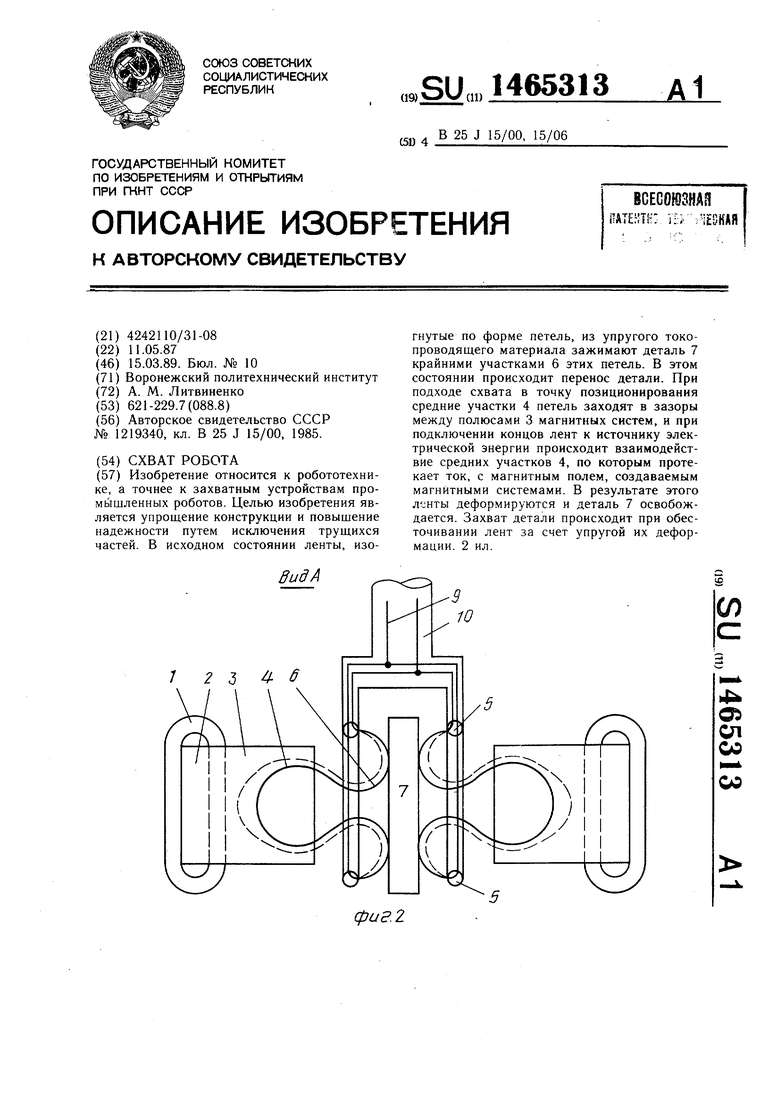
А
1 2 i 5 д 78
/ / / /
| Схват манипулятора | 1984 |
|
SU1219340A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
