1
Изобретение относится к робото
устройствам роботов и манипуляторов. Целью изобретения является повышение надежности захвата за счет уве личения рабочей поверхности схвата и усилия захвата.
На фиг. 1 изображен схват, обищй вид, в раскрытом состоянии; на фиг.2 схват с захваченной деталью.
Схват манипулятора содержит закрепленную одним концом на основании 1 ленту 2, выполненную из упругого магнитопроводного материала, изогнутую по форме спирали, и электромагниты . 3 , расположенные вдоль ленты в один ряд и жестко с ней связанные. Электромагниты 3 электрически свя- за«ы с образованием двух групп, так, что расположенные рядом электромагниты относятся к разным группам, причем одна из групп предназначена для подключения к источнику электрической энергии через реверсивный J переключатель (не показан), а другая непосредственно. Позицией 4 обозначена захватываемая деталь.
Схват работает следуюгрвм образом. Дпя раскрытия схвата электромагниты 3 подключаются к источнику электрической энергии, при этом реверсивным переключателем подключают электромагниты таким образом, чтобы создаваемые ими магнитные потоки имели одинаковое направление. В результате между соседними электромагнитами возникает отталкивающее
1283095
усилие, разгибающее предварительно согнутую по форме спирали ленту 2.
Для захвата детали изменяют направление тока в соседних электромагнитах с помощью реверсивного переключателя . При этом на соседних электромагнитах направление магнитного потока становится встречньм, что приводит к их взаимному притяжению и скручиванию в спираль ленты, охватывающей деталь 4.
15 Фор мула изобретения
Схват манипулятора, содеражщий ленту, выполненную из упругого магнитопроводного материала, закрепленную одним концом на основании, и электромагниты, расположенные вдоль ленты в один ряд и жестко с ней связанные с возможностью подключения к источнику электрической энергии, отличающийся тем, что, с целью повьшения надежности захвата, он снабжен реверсивным переключате
лем, а лента имеет форму спирали, при этом электромагниты электрически связаны с образованием двзгх групп так, что расположенные рядом электромагниты относятся к разным группам, причем одна из групп предназначена для подключения к источнику электрической энергиии через реверсивный переключатель, а другая - непосредственно.
Редактор К. Волощук
(fiut.Z .
Составитель С. Новик Техред Л.Сердюкова
Заказ 7344/14 Тираж 949Подписное
ВНИИИИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул: Проектная, 4
Корректор А, Обручар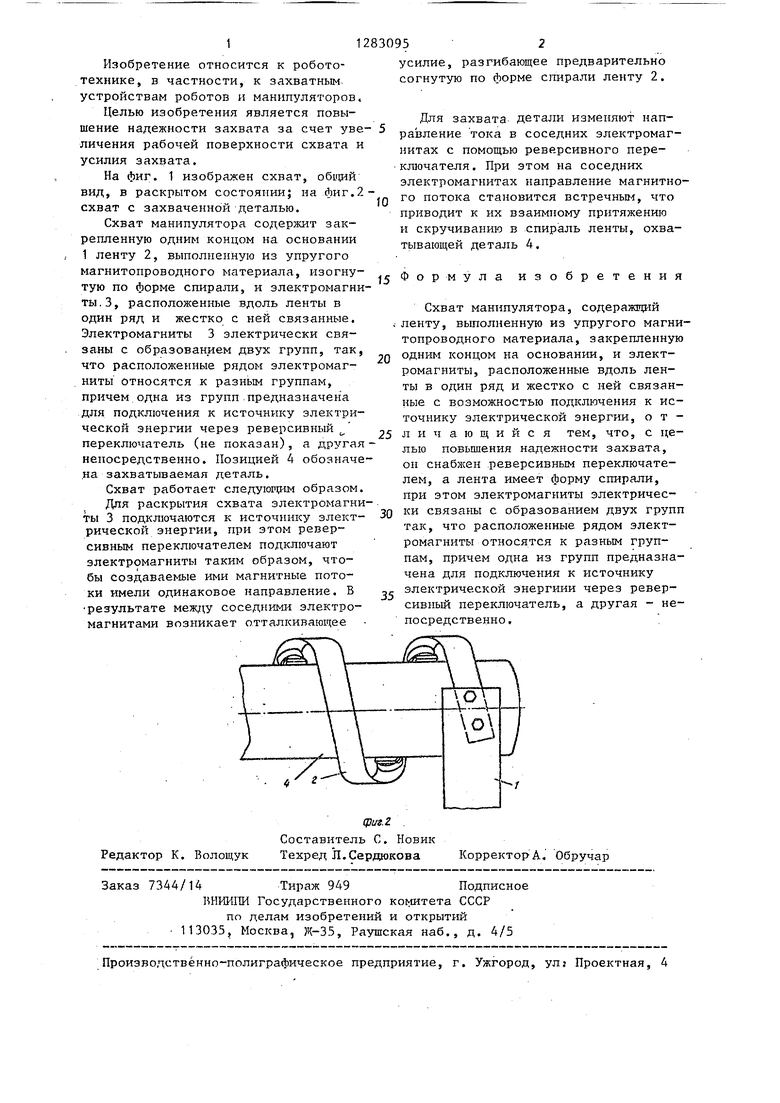
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1139623A1 |
| Стыковочное устройство руки промышленного робота | 1990 |
|
SU1815216A1 |
| Схват промышленного робота | 1986 |
|
SU1316817A1 |
| Схват | 1986 |
|
SU1388281A1 |
| Схват робота | 1987 |
|
SU1465313A1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Схват манипулятора | 1984 |
|
SU1301698A1 |
| Схват манипулятора | 1985 |
|
SU1305033A1 |
| Схват манипулятора | 1985 |
|
SU1390017A2 |
| Промышленный робот | 1989 |
|
SU1684022A1 |
Изобретение относится к области робототехники, в частности к захватным устройствам роботов и манипуляторов. Целью изобретения является по- вьшение надежности захвата за счет увеличения рабочей поверхности схвата и усиления захвата. При раскрытии схвата электромагниты 3, расположенные вдоль ленты 2, вьтолненной из упругого магнитопроводного материала, изогнутой по форме спирали, подключаются к источнику электрической энергии, при этом реверсивный переключатель, соединенный с расположенными через один электромагнитами, включен таким образом, что магнитные потоки в рядом расположенных электромагнитах направлены согласно. Воз- нккаюруге между электромагнитами силы отталкивания разгибают ленту. Для захвата детали 4 переключатель включают в положение, при котором потоки в рядом расположенных электромагнитах имеют встречное направление. 2 .ил. fcn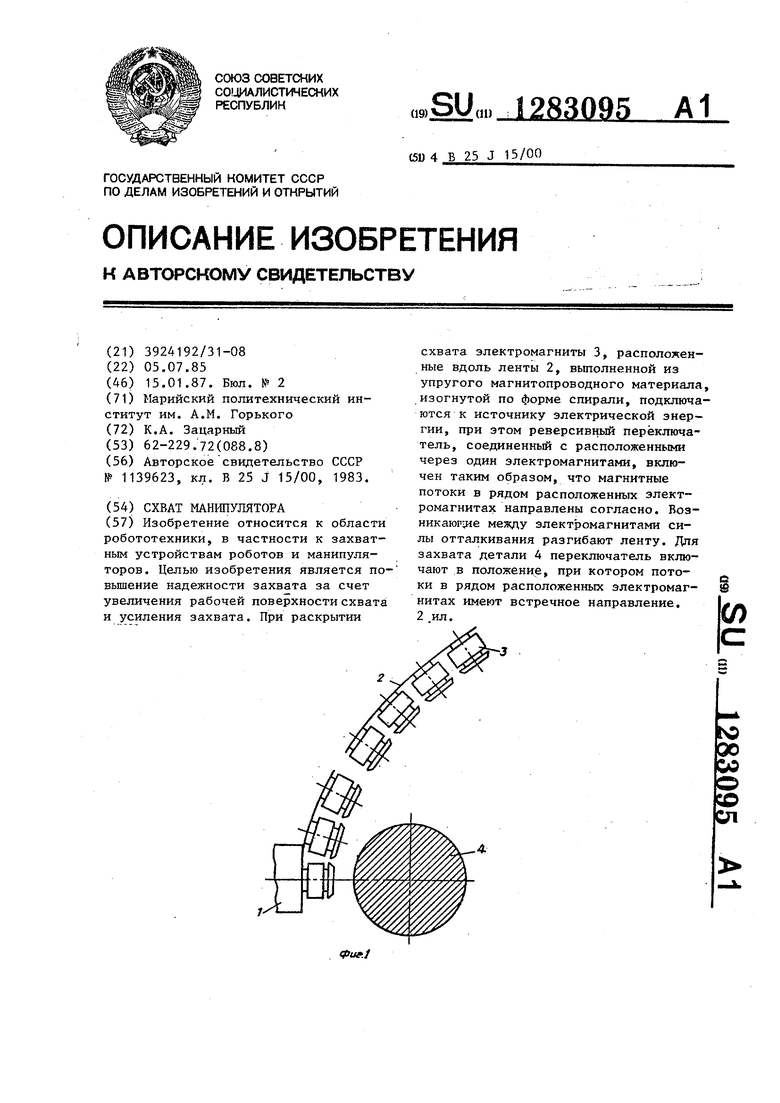
| Схват манипулятора | 1983 |
|
SU1139623A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
