Изобретение относится к робототехнике, в частности к захватным органам роботов и манипуляторов, и предназначено для захвата деталей и поворота их вокруг продольной оси для дальнейших технологических операций, например, при обработке картеров рулевого управления автомобилей.
Цель изобретения - расширение технологических возможностей и снижение динамических нагрузок в захватном органе за
при движении схвата входит в губки 4 и поворотный элемент 8, после чего в бесштоко- вую полость силового цилиндра 5 подается рабочая среда и шток-.члин 6, опускаясь, воздействует на зажимные рычаги 3, губки 4 которых зажимают деталь 17. Далее по команде системы управления рабочая среда подается в одну из полостей силового цилиндра 16, шток 15 которого со щеками 14 и зубчатой рейкой 13 перемещается в требуемом
счет обеспечения возможности захвата де- 10 направлении, поворачивая находящийся в
талей некруглого сечения и совместного поворота захватного органа с зажатой в нем деталью.
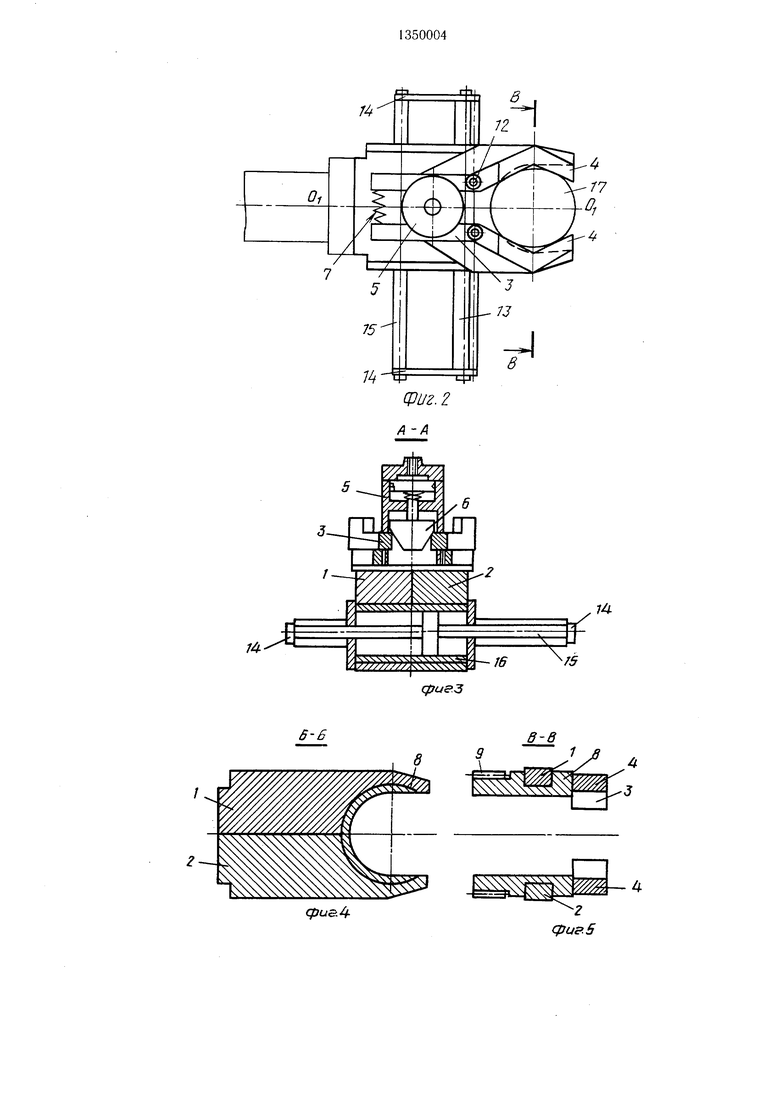
На фиг. 1 изображен схват, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 -
зацеплении посредством зубчатого участка 9 поворотный элемент 8 вокруг его оси О-О. Поскольку захватные рычаги 3 установлены на поворотном элементе 8, то они вместе с зажатой в них деталью поворачиваются на
разрез А-А на фиг. 1; на фиг. 4 - сечение тот же угол. Точность поворота дополниБ-Б на фиг. 1; на фиг. 5 - сечение В - В на фиг. 2; на фиг. 6 - разрез Г-Г на фиг. 1. Схват состоит из корпуса, выполненного из двух частей 1 и 2, захватного органа и механизма его поворота со своим приводом. Захватный орган состоит из зажимнь;х рычагов 3 с губками 4 и приводом их сведения-разведения, выполненного, например, в виде силового цилиндра 5 с подпружиненным штоком-клином 6, взаимодействующим с подпружиненными межд пружиной 7 зажимными рычагами Z
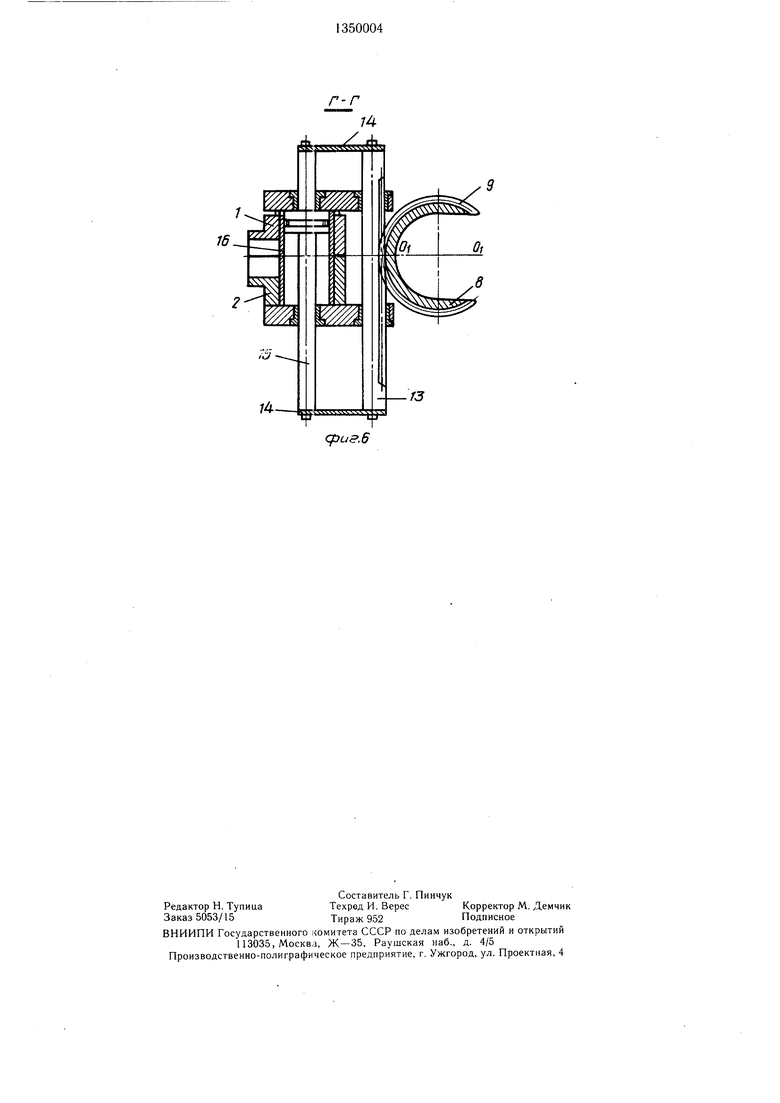
Механизм поворота захватного органа содержит поворотный элемент 8, вы:полнен- ный в виде цилиндрического сектора с зубчатым участком 9 в нижней части, в сред- ЗО ней части - пояском 10, посредством которого указанный сектор имеет возможность поворачиваться по направляющим
11,выполненным в корпусе. Кроме того, сверху на поворотном элементе 8 установлены зажимные рычаги 3 посредством штырей 35
12,являющихся осями поворота при их сведении-разведении. Своим зубчатым участком 9 поворотный элемент 8 взаимодействует с зубчатой рейкой 13, жестко соединенной посредством щек 14 с двусторонним штоком 15 силового цилиндра 16 привода поворота, установленного в корпусе.
Схват работает следующим . По команде системы управления рука ротельно обеспечивается регулируемыми упорами, установленными в силовом цилиндре 16 (не показаны).
После поворота схват рукой робота дос- 2Q тавляет деталь, развернутую требуемой частью, на следующую технологическую позицию. Подача рабочей среды в силовой цилиндр 5 прекращается, шток-клин 6 под воздействием возвратной пружины поднимается вверх, освобождая зажимные рыча- собой 25 ги 3, которые в свою очередь под воздействием пружины 7 раскрываются, освобождая деталь 17. Схват отводится в исходное положение, также в исходное положение возвращается поворотный элемент 8 подачей рабочей среды в силовой цилиндр 16.
Схват готов для следующего цикла.
Предлагаемый схват позволяет автоматизировать процессы технологической обработки, требующие поворотов деталей на заданный угол, например, при обработке картеров рулевого управления автомобилей.
40
Формула изобретения
1. Схват робота, содержащий корпус, захватный орган, состоящий из зажи.мных рычагов с губками и приводом их сведения- разведения, и механизм поворота захват- :ioro органа со своим приводом, отличающийся тем, что, с целью расщирения тех- но.гюгических возможностей и снижения динамических нагрузок, механизм поворота
бота подводит схват к зажимаемой детали 17, захъатного органа выполнен в виде повонаходящейся в фиксированном положении и закрепленной с обоих концов. Зажимные рычаги 3 с губками 4 разведены пружиной 7, а щток-клин 6 силового цилиндра 5 находится в верхнем положении. Радиус поворотного элемента 8 выбирается, исходя 50 из размеров части детали, контактирующей с губками, и требования свободного вхождения детали в зев поворотного элемента 8, ось О-О которого в исходном положении перпендикулярна зубчатой рейке 13. Деталь
ротного элемента, установленного в направляющих, выполненных в корпусе, при этом зажимные рычаги с губками установлены на поворотном элементе, кинематически связанном с приводом его поворота. 2. Схват по п. 1, отличающийся тем, что кинематическая связь выполнена в виде зубчатой рейки, жестко установленной на штоке привода поворота, имеющей возможность взаимодействия с зубчатым сектором, выполненным на поворотном эле.менте.
при движении схвата входит в губки 4 и поворотный элемент 8, после чего в бесштоко- вую полость силового цилиндра 5 подается рабочая среда и шток-.члин 6, опускаясь, воздействует на зажимные рычаги 3, губки 4 которых зажимают деталь 17. Далее по команде системы управления рабочая среда подается в одну из полостей силового цилиндра 16, шток 15 которого со щеками 14 и зубчатой рейкой 13 перемещается в требуемом
зацеплении посредством зубчатого участка 9 поворотный элемент 8 вокруг его оси О-О. Поскольку захватные рычаги 3 установлены на поворотном элементе 8, то они вместе с зажатой в них деталью поворачиваются на
тот же угол. Точность поворота дополни35
40
Формула изобретения
1. Схват робота, содержащий корпус, захватный орган, состоящий из зажи.мных рычагов с губками и приводом их сведения- разведения, и механизм поворота захват- :ioro органа со своим приводом, отличающийся тем, что, с целью расщирения тех- но.гюгических возможностей и снижения динамических нагрузок, механизм поворота
захъатного органа выполнен в виде поворотного элемента, установленного в направляющих, выполненных в корпусе, при этом зажимные рычаги с губками установлены на поворотном элементе, кинематически связанном с приводом его поворота. 2. Схват по п. 1, отличающийся тем, что кинематическая связь выполнена в виде зубчатой рейки, жестко установленной на штоке привода поворота, имеющей возможность взаимодействия с зубчатым сектором, выполненным на поворотном эле.менте.
Л
74
В
(риг. 2
А-А
/5
qptje3
6-Б
фие.
в-в
т74
ГЗ
Cf}u.6
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1985 |
|
SU1289679A1 |
| Схват робота | 1990 |
|
SU1773716A1 |
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Схват | 1977 |
|
SU659377A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
Изобретение относится к робототехнике, в частности к захватным органам роботов и манипуляторов, и предназначено для захвата деталей и поворота их вокруг продольной оси. Цель - расширение технологических возможностей и снижение динамических нагрузок в захватном органе за счет обеспечения возможности захвата деталей некруглого сечения и совместного поворота захватного органа с зажатой в нем деталью. Для этого механизм поворота захватного органа выполнен в виде поворотного элемента 8, установленного в направляющих II, выполненных в корпусе, и имеющего зубчатый участок 9, взаимодействующий с зуб чатой рейкой 13, жестко связанной с приводом механизма поворота. Деталь захватывается зажимными рычагами 3 с губками 4 под воздействием привода их сведения- разведения, установленными на поворотном элементе 8. Далее деталь поворачивается на требуемый угол и переносится на следующую технологическую позицию. 1 з.п. ф-лы, 6 ил. § (Л г/L со СП 4; Фиг.1
| Захват манипулятора | 1978 |
|
SU770788A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Модуль движения робота | 1976 |
|
SU576211A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
