Фие.Ъ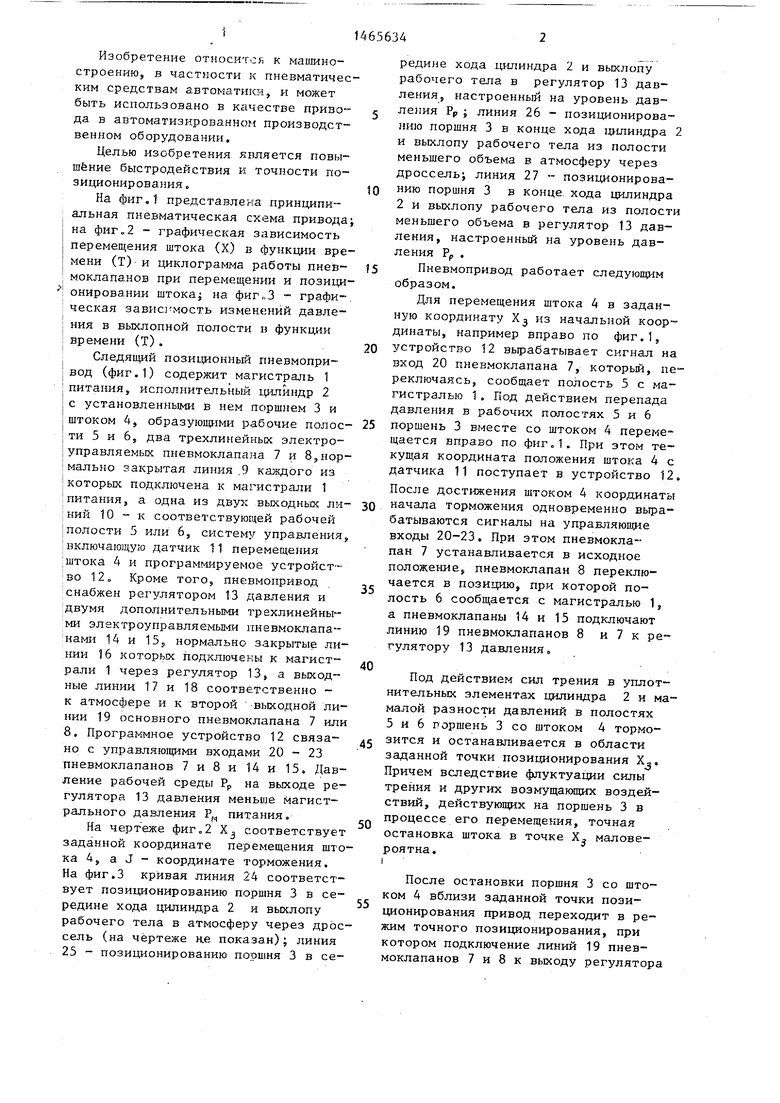
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| Позиционный пневмопривод | 1986 |
|
SU1418511A1 |
| Следящий позиционный пневмопривод | 1983 |
|
SU1110946A1 |
| Пневмопривод | 1989 |
|
SU1663248A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 1993 |
|
RU2016270C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| Устройство для управления подачей давления в гидроцилиндры секций механизированных крепей | 1986 |
|
SU1597114A3 |
| Трехпозиционный привод дистанционного управления гидрораспределителем | 1985 |
|
SU1288383A1 |
| Гидропневматическое амортизирующее устройство землеройно-транспортной машины | 1986 |
|
SU1460148A1 |
| Пневматический привод | 1985 |
|
SU1288386A1 |
Изобретение Mt6, использовано в качестве пневмопривода в автоматизированном производственном оборудовании. Цель изобретения - повышение быстродействия и точности позиционирования следящего пневмопривода. Поршень 3 и шток 4 установлены в исполнительном цилиндре 2 с образованием рабочих полостей 5, 6. Нормально закрытые линии 9 трехлинейных электроуправляемых пневмоклапанов 7, 8 подключены к магистрали 1 питания, одна из двух выходных линий 10 - к полости 5 или 6. Система управления включает датчик 11 перемещения штока 4. Программируемое устр-во 12 подключено к управляющим входам пневмоклапанов 7, 8. Нормально закрытые линии 16 трехлинейных электроуправляемых пневмоклапанов 14, 15 подключены к магистрали 1 через регулятор 13 давления, выходные линии 17, 18 - к атмосфере и к выходной линии 19. Уменьшение интенсивности управляющих воздействий на поршень 3 увеличивает декремент затухания колебаний вокруг заданной точки и сокращает длительность процесса пози- ционирования. 3 ил. i С/)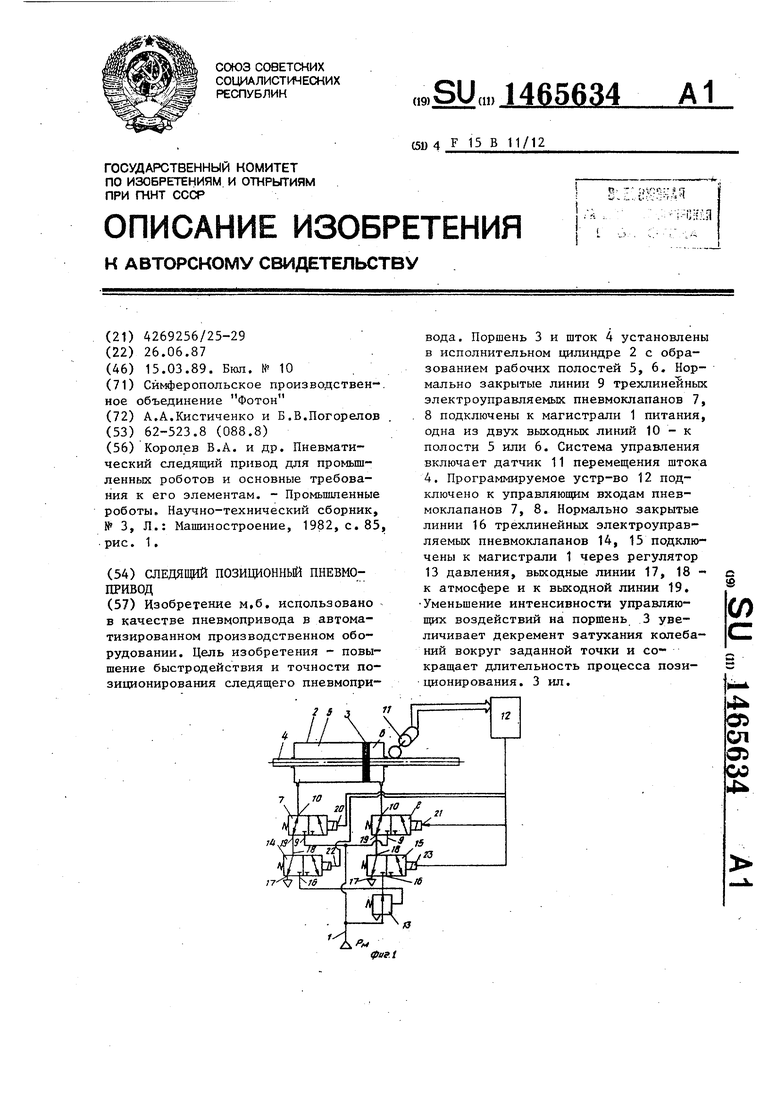
Составитель В.Коваль Редактор Л.JBeceлoвcкaя Техред А.Кравчук Корректор В.Романенко
Заказ 927/37
Тираж 602
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина,101
Подписное
| Королев В.А | |||
| и др | |||
| Пневматический следящий привод для промышленных роботов и основные требования к его элементам | |||
| - Промьшшенные роботы | |||
| Научно-технический сборник, № 3, Л.: Машиностроение, 1982, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
