4
00 СП
Изобретение относится к средствам пнев- моавтоматики, в частности к пневмоприво- дам для перемещения органов из одного положения Б другое, и может найти при- менение в различном автоматическом обо- рудовании и промышленных роботах.
Цель изобретения - упрощение пневмо- привода и повышение быстродействия и точности позиционирования.
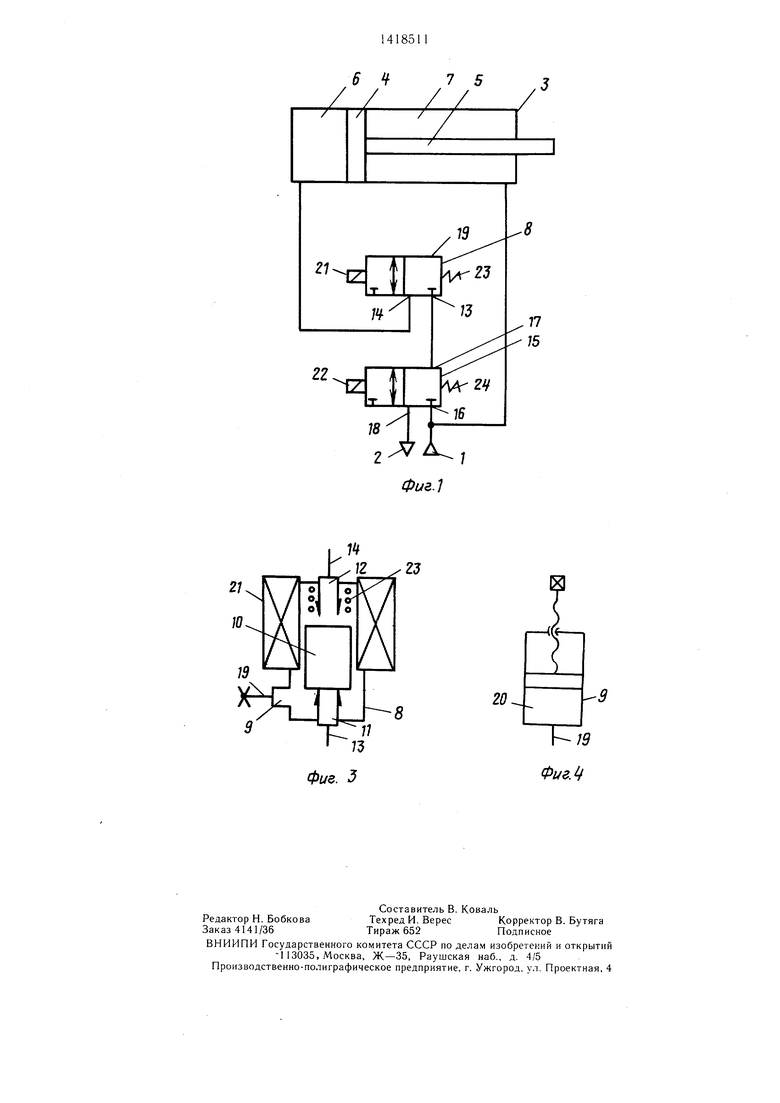
На фиг. 1 представлена принципиальная пневматическая схема привода; на фиг. 2 - то же, с автономной емкостью; на фиг. 3 - конструктивная схема выполнения пневмораспределителя дозирующего устройства; на фиг. 4 - конструктивное выполнение емкости.
Позиционный пневмопривод (фиг. 1 и 3) содержит напорную 1 и сливную 2 магистрали, пневмоцилиндр 3, поршень 4 со штоком 5, установленные в нем с образованием поршневой 6 и штоковой 7 полостей, дозирующее устройство, включаю- щее трехлинейный пневмораспределитель 8 с емкостью 9 (фиг. 2-4).
Пневмораспределитель 8 выполнен в виде запорного элемента 10 (фиг. 2), взаимо- действуюц его с соплами 11 и 12, которые подключены к входной 13 и выходной 14 ли- ниям соответственно. Запорный элемент 10 установлен с возможностью поочередного сообщения емкости 9 с полостью 6 и вход- ной линией 13. Дозирующее устройство так- же включает направляющий пневмораспределитель 15, который входной линией 16 подключен к напорной магистрали 1, а выходными линиями 17 и 18 к входной линии 13 и сливной магистрали 2 соот- ветственнс Штоковая полость 7 непосред- ственно подключена к напорной магистрали 1. Выходная линия 19 пневмораспределителя 8 подключена к автономной емкости 9 (фиг. 3), которая может быть выполнена регулируемого рабочего объема 20. Пневмораспределители 8 и 15 управляются электромагнитами 21 и 22 и пружинами 23 и 24.
Позиционный пневмопривод работает следующим образом.
При движении поршня 4 со штоко.м 5 вправо (фиг. 1 и 3) управляющий сигнал подается на электромагнит 22, переключая пневмораспределитель 15. При этом линии 13 и 17 сообщаются с напорной магистралью 1. Далее управляющие импульсы подаются на электромагнит 21, вследствие этого запорный элемент 10 последовательно перекрывает сопла 11 и 12. Емкость 9 сообщается либо с входной линией 13, либо с поршневой полостью 6, что приводит к перемещению порщня 4. При достижении поршнем 4 зоны допуска на заданное положение прекращается подача управляющих импульсов на электромагнит 21 и .практически без запаздывания перекрывается подвод рабочей среды в по0
лость 6, так как пневмораспределитель 8 является нормально закрытым в обеих своих позициях. Если силы инерции, действующие в момент остановки на поршень 4, не велики и не приводят к выходу штока 5 из зоны допуска на заданное положение, то поршень 4, не соверщая колебаний, останавливается в заданном положении в пределах зоны допуска.
В случае перебега щтока 5 за зону допуска одновременно поступают управляющий сигнал на отключение электромагнита 22 и управляющие импульсы на электромагнит 21. Это приводит к отводу рабочей среды из полости 6 и реверсу порш2 ня 4, который снова входит в зону заданного положения. Ввиду того, что запаздывание на перекрытие полости 6 практически отсутствует, происходит быстрое гашение инерции поршня 4, и, совершив небольшое число затухающих колебаний, он
0 занимает положение в пределах зоны допуска, при этом его автоколебания не возобновляются и этим обеспечивается повышение быстродействия и точности позиционирования.
Изменением рабочего объема 20 емкости 9 достигается увеличение или уменьшение импульсов расхода рабочей среды, подаваемой или отводимой из полости 6. При этом можно регулировать скорость перемещения штока 5 и достигать оптиQ мального быстродействия.
Технико-экономическая эффективность от использования предлагаемого привода заключается в упрощении конструкции и повышении производительности автоматического оборудования и роботов.
5
35
Формула изобретения
1.Позиционный пневмопривод, содержащий напорную и сливную магистрали, пневмоцилиндр, поршень со штоком, установленные в нем с образованием порщ- невой и штоковой полостей, дозирующее устройство, включающее трехлинейный пневмораспределитель с емкостью, и направляющий пневмораспределитель, подключенный к
напорной и сливной магистралям, при этом трехлинейный пневмораспределитель выполнен с возможностью поочередного сообщения емкости с одной из полостей и входной его линией, отличающийся тем, что, с целью упрощения пневмопривода и повышения быстродействия и точности позиционирования, штоковая полость постоянно связана с напорной магистралью, при этом направляющий пневмораспределитель выполнен трехлинейным и подключен к входной линии пневмораспределителя дозирующего устройства.
2.Пневмопривод по п. 1, отличающийся тем, что емкость выполнена регулируемого рабочего объема.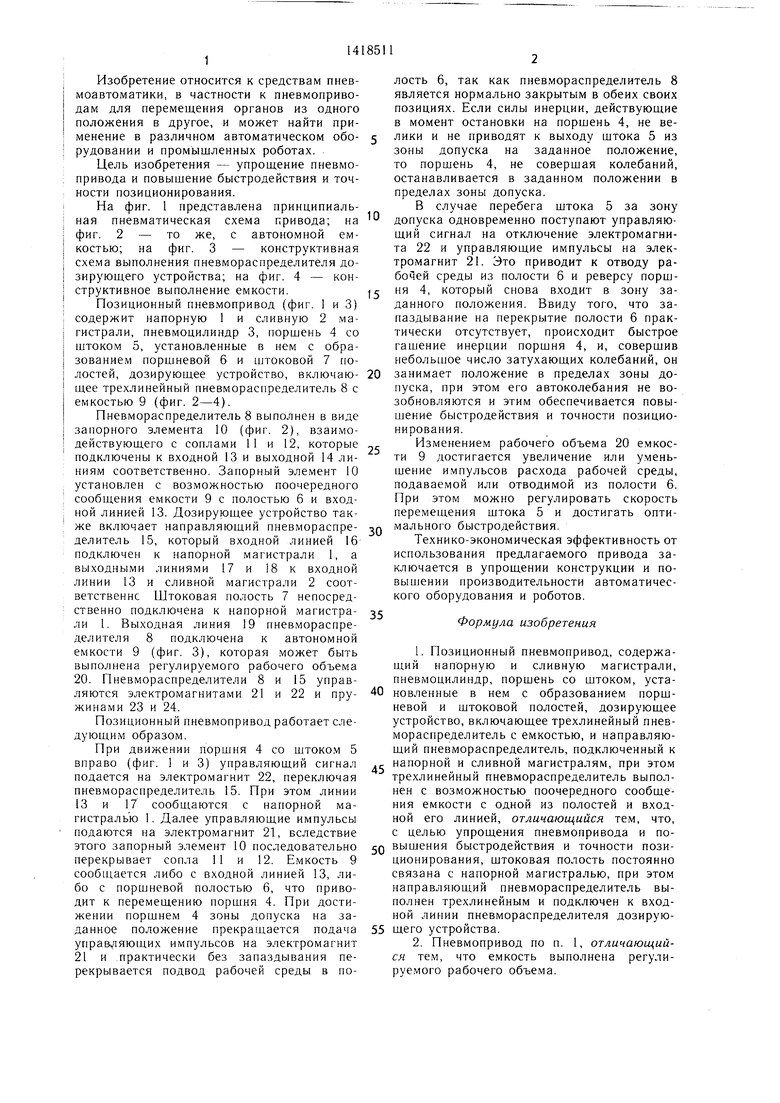
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмопривод | 1989 |
|
SU1665114A1 |
| Пневмопривод | 1989 |
|
SU1663248A1 |
| Трехпозиционный привод дистанционного управления гидрораспределителем | 1985 |
|
SU1288383A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 1993 |
|
RU2016270C1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| Гидропривод | 1991 |
|
SU1827449A1 |
| Пневматический привод | 1985 |
|
SU1288386A1 |
| Пневмопривод | 1988 |
|
SU1583670A1 |
| СИСТЕМА ПРЕДОХРАНЕНИЯ КРИВОШИПНОГО ПРЕССА ОТ ПЕРЕГРУЗОК | 1996 |
|
RU2103176C1 |
| Пневматический привод | 1988 |
|
SU1596142A1 |
Изобретение .м. б. использовано в автоматическом оборудовании и промьпилен- пых роботах. Цель изобретения - уиро- П1ение пневмопривода и повышение быстродействия и точности позиционирования. Порн1невая и н токовая полости 6 и 7 пневмоцилипдра 3 подключены к дозирующе6 м устр-ву, выиолненному в виде трехлинейного пневмораспределителя (ПР) 8 с емкостью 9 регу.чируемого рабочего об ье- ма, с возможностью поочередного сообщения с емкостью. Полость 6 подключена к ПР 8 непосредственно, а полость 7 - через трехлинейный наиравляюпгий ПР 15, подключенный к напорной и сливной ма- 1-истралям 1, 2, при этом полость 7 напрямую подключена к магистрали I. В случае перебега штока 5 за зону донуска одновременно поступают управляюи1ий сиг- на.ч на отключение электромагнитов 21 и 22 ПР 8 и 15, что приводит к реверсу поршня и быстрому ган1ению его колебаний за счет отсутствия запаздывания перекрытия рабочей полости. (Скорость пере.мешения штока 5 и его быстродействие регулируются из.менснием обьема емкости 9. 1 з. п. ф-лы, 4 H. i. о сл 7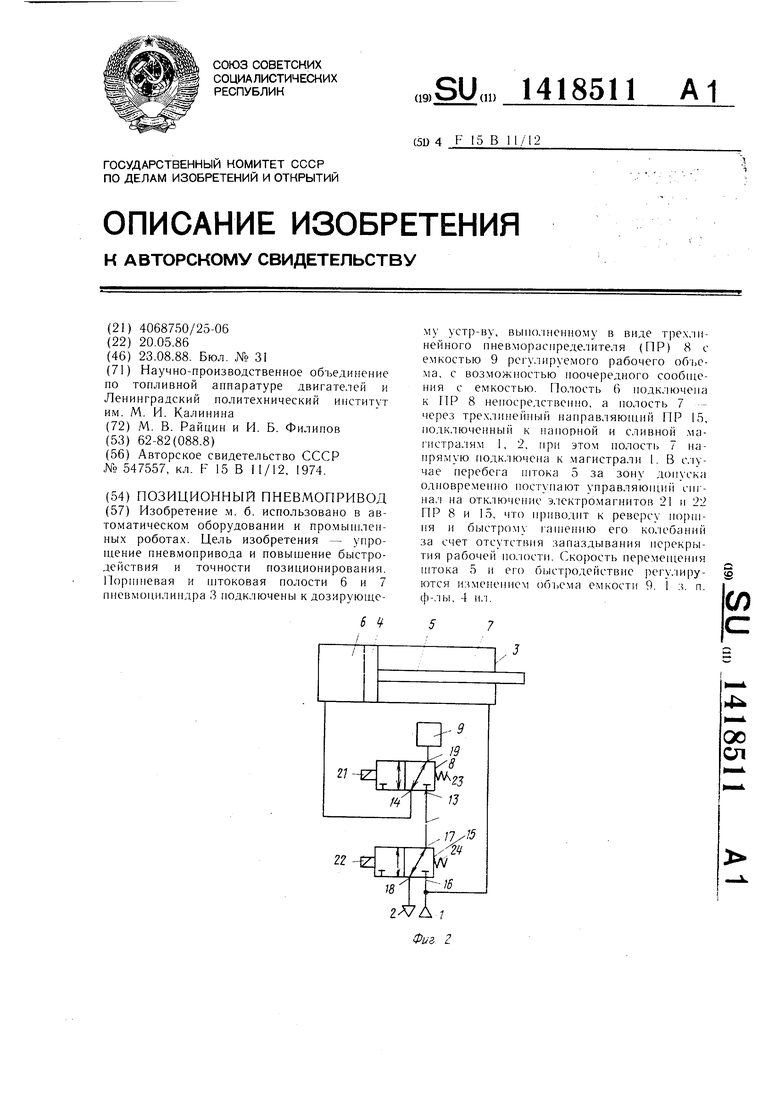
Фиг.1
JZ /2J
20
| Способ дискретного регулирования скорости перемещения поршня | 1974 |
|
SU547557A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
