-22
о о
со
Ю
Јь
00
Изобретение относится к машиностро- ению, в частности к средствам гидропневмоавтоматики, и может быть испольозвано в устройствах для удаления остатков сыпучих материалов из вагонов. Цель изобретения - расширение функ- циональных возможностей путем создания колебаний выходного звена в фиксированных положениях пневмоцилиндра.
На чертеже представлена принципи- альная пневматическая схема привода.
Пневмопривод содержит исполнительный пневмоцилиндр 1 с установленным в нем с образованием поршневой 2 и штоко- вой 3 полостей поршнем 4 с односторонним штоком 5, жестко связанным с копиром 6, установленным с возможностью взаимодействия с трехлинейным двухпозицион- ным пневмораспределителем 7, линия 8 которого подключена к магистрали 9 пита- ния, а линия 10 - к атмосфере. В магистрали 9 установлены фильтр-влагоотделитель 11, редукционный клапан 12 и маслораспыли- тель 13, Поршневая 2 и штоковая 3 полости подключены к магистрали 9 питания и ат- мосфере через четырехлинейный двухпози- ционный пневмораспределитель 14. Кроме того, привод содержит пневмоударный механизм 15, вход 16 которого подключен к магистрали 9 питания через пневмозамок 17с клапаном 18, жестко связанным с поршнем 19, установленным в корпусе 20 с образованием управляющих полостей 21 и 22. Полость 21 связана с выходом логического элемента ИЛИ 23, входы 24 и 25 которого соответственно подключены к линии 26 пневмораспределителя 7 и штоковой полости 3 пневмоцилиндра 1. Полость 22 подключена к магистрали 9 питания и атмосфере через трехлинейный двухпози- ционный пневмораспределитель 27. Для обеспечения нормальной работы пневмоу- дарного механизма 15 все узлы смонтированы на тележке, перемещаемой по рельсам параллельно рельсам вагона (те- лежка не показана), а его выходное звено 28 связано с обрезиненной рабочей головкой 29.
Устройство работает следующим образом.
С помощью пневмораспределителя 14 сжатый воздух подводится в поршневую полость 2 пневмоцилиндра 1, Поршень 4 совместно со штоком 5, пневмоударным механизмом 15 и копиром 6 движется до упо- ра рабочей головки 9 о брус вагона который необходимо очистить от остатков сыпучего материала. Затем, переключив пневмораспределитель 27, подают сжатый воздух в управляющую полость 22. При этом
поршень 19 вместе с клапаном 18 перемещается вниз (по чертежу) и вход 16 пневмо- ударного механизма 15 подключается к магистрали 9 питания. Включается в работу пневмоударный механизм 15, ударяя го-, ловкой 29 с определенной частотой по брусу, очищая стенки вагона. По истечении времени, заложенного в технологическом процессе, переключается пневмораспределитель 14 и шток 5 с поршнем 4 возвращается в исходное положение. При этом сжатый воздух одновременно поступает через элемент 23 в управляющую полость 21, закрывая пневмозамок 17. В таком состоянии пневмоударный механизм 15 не включается и поршень 4 не соударяется с пневмоцилиндром 1, Цикл повторяется. Далее устройство с помощью тележки перемещается в следующую позицию обработки вагонов от остатков сыпучих материалов. В случае перемещения поршня 4 за пределы рабочего хода копир 6, взаимодействуя с пневмораспределителем 7, переключает его. Сжатый воздух по линиям 8 и 26 пневмораспределителя через вход 24 и выход элемента ИЛИ 23 поступает в управляющую полость 21 пневмозамка, отключая подачу сжатого воздуха в пневмоударный механизм 15. При этом поршень 4 не ударяется о пневмоцилиндр 1 под действием вибрации пневмоударного механизма 15.
Технико-экономическая эффективность от использования предложенного привода заключается в повышении надежности и долговечности устройств для удаления остатков сыпучих материалов из вагонов. Формула изобретения Пневмопривод, содержащий исполнительный пневмоцилиндр с односторонним штоком, жестко связанным с копиром, установленным с возможностью взаимодействия с трехлинейным двухпозиционным пневмораспределителем, одна из линий которого подключена к одному из входов логического элемента ИЛИ, а вторая линия - к магистрали питания, отличающийся тем, что, с целью расширения функциональных возможностей путем создания колебаний выходного звена в фиксированных положениях пневмоцилиндра, привод снабжен пневмоударным механизмом, жестко связанным со штоком исполнительного пневмоцилиндра, при этом вход пневмоударного механизма подключен к магистрали питания через дополнительно установленный пневмозамок, управляющая полость которого связана с выходом элемента ИЛИ, второй вход которого подключен к штоковой полости исполнительного пневмоцилиндра.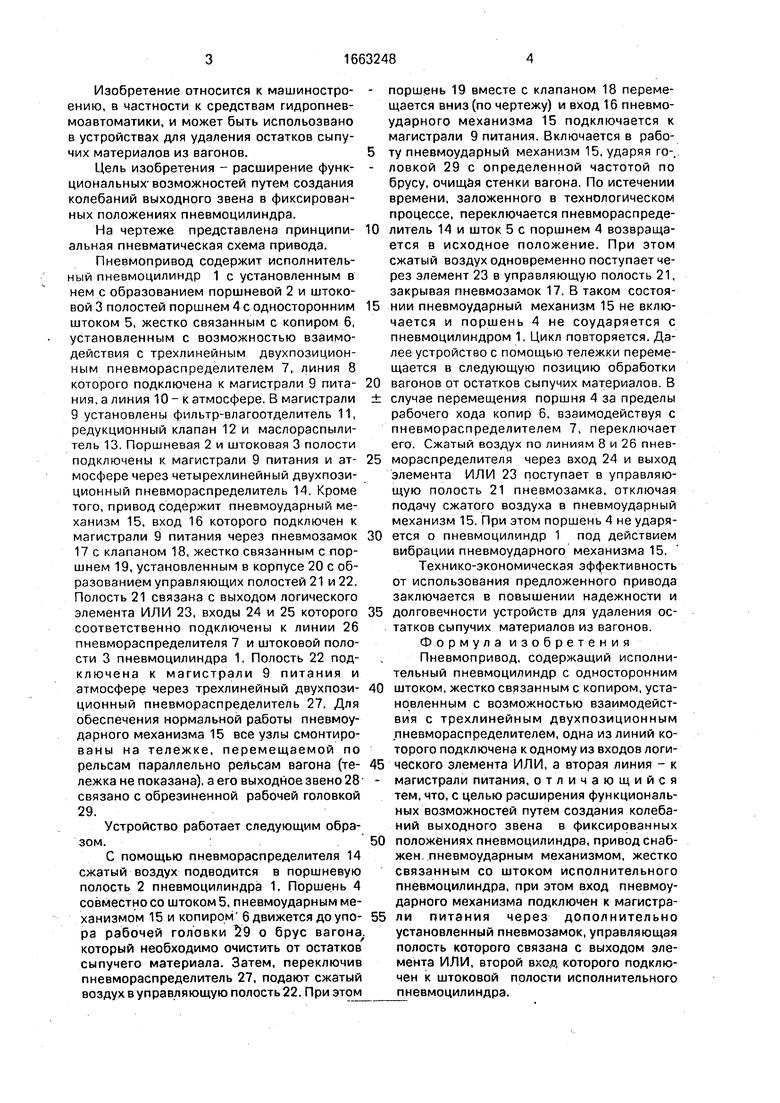
| название | год | авторы | номер документа |
|---|---|---|---|
| Дозатор сыпучих материалов | 1990 |
|
SU1760363A1 |
| Пневмопривод | 1989 |
|
SU1665114A1 |
| Раздвижное транспортное средство для перевозки длинномерных грузов | 1988 |
|
SU1685767A1 |
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
| Позиционный пневмопривод | 1986 |
|
SU1418511A1 |
| Пневматический привод | 1988 |
|
SU1596142A1 |
| Устройство для перемещения заготовок с позиции вырубки на следующую позицию штампа | 1989 |
|
SU1696065A1 |
| УЗЕЛ ПРИСОЕДИНЕНИЯ БЛОКА ХВОСТОВОГО ВАГОНА | 2006 |
|
RU2326779C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 1993 |
|
RU2016270C1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
Изобретение м.б. использовано в устройствах для удаления остатков сыпучих материалов из волокон. Цель изобретения - расширение функциональных возможностей путем создания колебаний выходного звена в фиксированных положениях пневмоцилиндра. Пневмоударный механизм (ПМ) 15, жестко связанный со штоком 5 наполнительного пневмоцилиндра 1, включается в работу при открытии пневмозамка 17, управление которым осуществляется при переключении пневмораспределителей (ПР) 7, 27. При выходе поршня (П) 4 из рабочего диапазона его перемещения копир 6, взаимодействующий с ПР 7, переключает его, сообщая управляющую полость 21 с магистралью 9 питания через логический элемент ИЛИ 23. Аналогичным образом происходит отключение ПМ 15 при возврате П 4 в исходное положение, поскольку вход 25 элемента ИЛИ 23 непосредственно связан со штоковой полостью 3. При этом исключается соударение П 4 с пневмоцилиндром 1 под действием вибрации ПМ 15. 1 ил.
| Филипов И.Б | |||
| и др | |||
| Системы позиционирования рабочих органов промышленных роботов с пневмоприводами: Обзор/НИИ- маш, 1983, с | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
