Изобретение относится к области управления и регулирования и может быть использовано при построении са- S4O и а страивающихся беспоисковых систем р егулирования с замк1гу1Ъ м циклом в различных областях применения,.
Цель изобретения - повышение точности и надежности,системы.
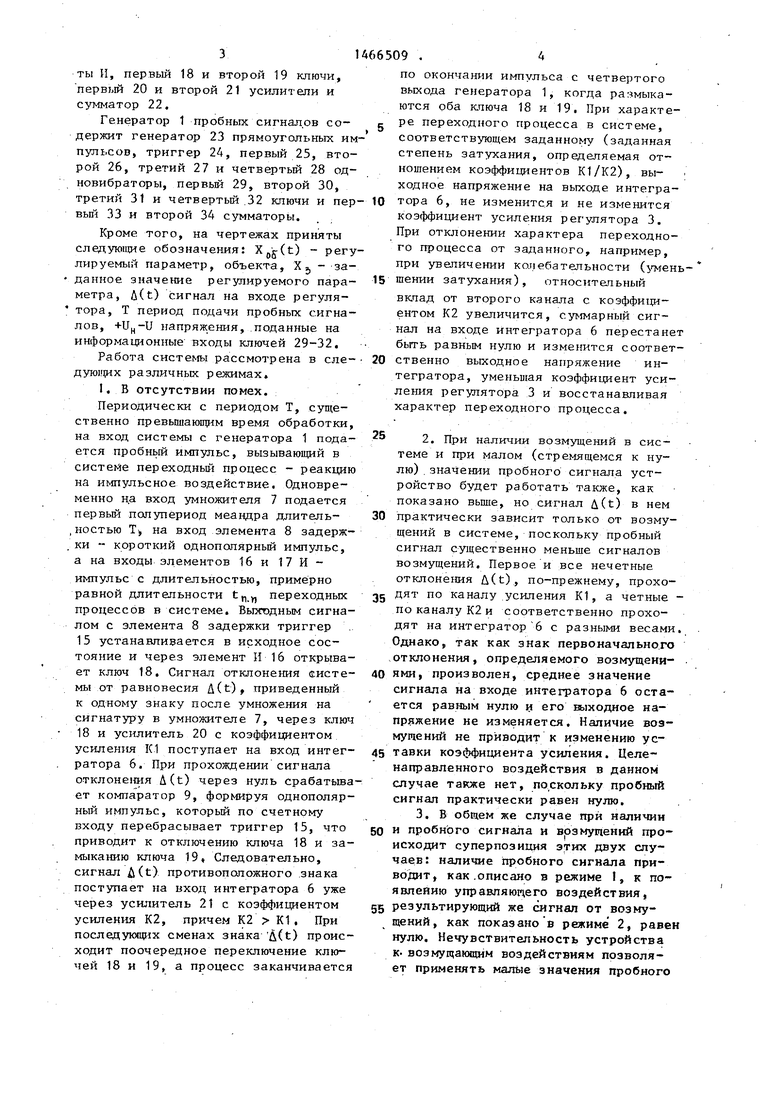
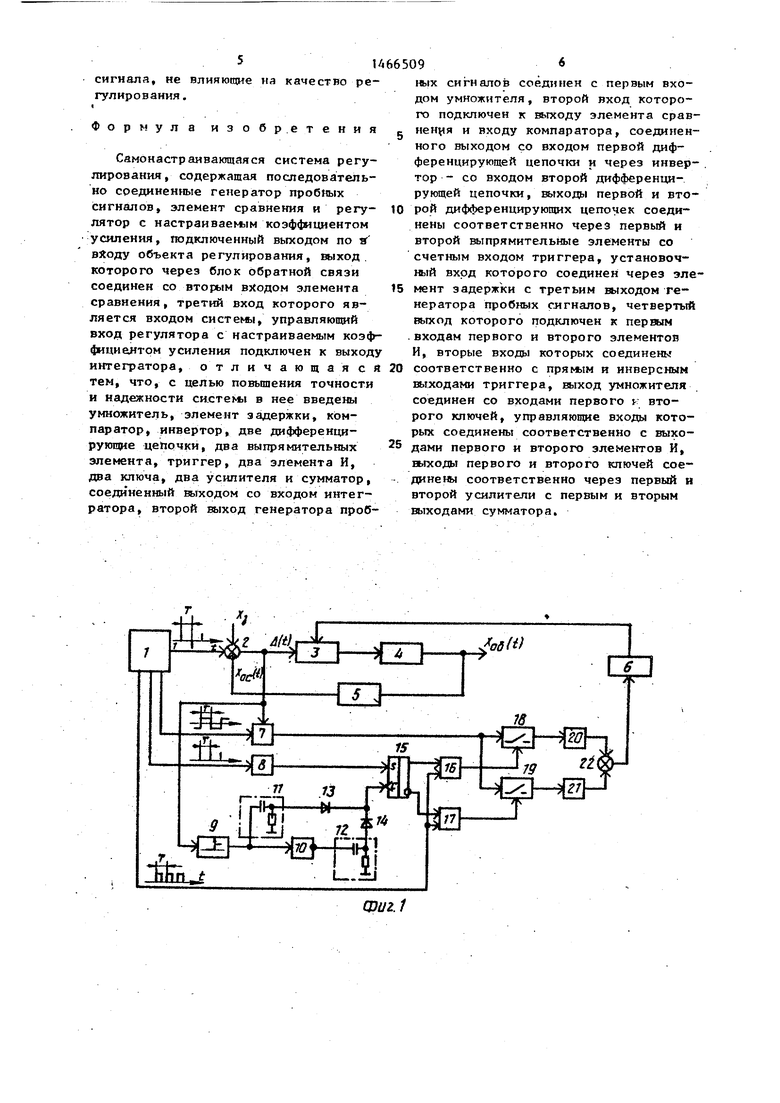
На фиг,/( приведена функциональ- , ная схема системы; на (Jrnr. 2 - схема построения генератора пробных сигналов. tO-89
Са 5онастраивающаяся система ре- гулированяя содержг т генератор I
.пробных сигналов, элемент 2 сравнения, регулятор 3 с настраиваемым ко- эф(}ицие} том усиления, обьект 4 регуг лирования, блок 5 обратной свйзи, интегратор 6, умножитель 7, элемент 8 задержки, компаратор 9, инвертор 10, первую П и вторую 12 дифферен. цирующие цепочки, первый 13 и второй 14 выпрямительные элементы, триггер J-5, первый 16 и второй 17
ты Н, первый 18 и второй 19 ключи, первый 20 и второй 21 усилители и сумматор 22.
Генератор 1 пробных сигнал.ов содержит генератор 23 прямоугольных импульсов, триггер 24, первый 25, второй 26, третий 27 и четвертый 28 од- новибраторы, первьй 29, второй 30,
по окончании импульса с четвертого выхода генератора 1, когда размыкаются оба кпюча 18 и 19. При характе ре переходного процесса в системе, соответствующем заданному (заданная степень затухания, определяемая отношением коэффициентов К1/К2), выходное напряжение на выходе интегра
г- -у - г -.j.-- -г-1,- ., .члч-« j.iv 1и xjuiy vj CI -rinittlUcl
третий 31 и четвертый .32 ключи и пер- 10 тора 6, не изменится и не изменится вьш 33 и второй 34 сумматоры. .коэффициент усиления регулятора 3.
При отклонении характера
Кроме того, на чертежах приняты следуюпще обозначения: ) - регулируемый параметр, объекта, X,, - за- данное значение регулируемого параметра, A(t) сигнал на входе регулятора, Т период подачи пробных сигналов, напряжения,.поданные на ин(1)ормационные входы ключей 29-32.
Работа системы рассмотрена в еле- дуюпщх различных режимах.
I. В отсутствии помех.
Периодически с периодом Т, существенно превышающим время обработки, на вход системы с генератора 1 подается пробньш импульс, вызывающий в системе переходньй процесс - реакцию на импульсное воздействие. Одновременно на вход умножителя 7 подается первый полупёриод меацдра длитель- ,ностью Т на вход элемента 8 задерж- . ки - короткий однопопярный импульс, а на входы элементов 16 и 17 И - импульс с длительностью, примерно равной длительности , переходных процессов в системе. Выходным сигналом с элемента 8 задержки триггер 15 устанавливается в исходное состояние и через элемент И 16 открывает ключ 18. Сигнал отклонения системы от равновесия Д(ь), приведенный к одному знаку после умножения на сигнатуру в умножителе 7, через ключ 18 и усилитель 20 с коэффициентом усиления К1 поступает на вход интегратора 6. При прохождении сигнала отклоне1шя A(t) через нуль срабатьша- ет компаратор 9, формируя однополяр- ный импульс, который по счетному входу перебрасывает триггер 15, что приводит к отключению ключа 18 и замыканию ключа 19, Следовательно, сигнал (t) противоположного знака поступает на вход интегратора 6 уже через усилитель 21 с коэффициентом усиления К2, причем К2 К1. При последующих сменах знака u(t) происходит поочередное переключение ключей 18 и 19, а процесс заканчивается
30
35
переходно го процесса от заданного, например, при увеличении колебательности (
15 шении затухания), относительный вкпад от второго канала с козффигщ- ентом К2 увеличится, суммарный сигнал на входе интегратора 6 перестане быть равным нулю и изменится соответ
20 ственно выходное напряжение интегратора, уменьшая коэффициент усиления регулятора 3 и восстанавливая характер переходного процесса.
2. При налргчии возмущений в системе и при малом (стремящемся к нулю) .значении пробного сигнала устройство будет работать также, как показано вьше, но сигнал u(t) в нем практически зависит только от возму щений в системе, поскольку пробный сигнал существенно меньше сигналов возмущений. Первое и все нечетные отклоне1шя u(t), по-прежнему, проходят по каналу усиления К1, а четные по каналу К2 и соответственно проходят на интегратор 6 с разными весами Однако, так как знак первоначального .отклонения, определяемого возмущени- 40 ями, произволен, среднее значение сигнала на входе интегратора 6 остается равным нулю и его выходное напряжение не изменяется. Наличие возмущений не приводит к изменению ус- 45 тавки коэффициента усиления. Целенаправленного воздействия в данном случае также нет, поскольку пробный сигнал практически равен нулю.
3. В общем же случае при наличии 50 и пробного сигнала и возмущений происходит суперпозиция этих двух случаев: наличие пробного снгндла приводит, как.описано в режиме 1, к появлению управляюпего воздействия, 55 результирующий же сигнал от возму- щений, как показано в режиме 2, раве нулю. Нечувствительность устройства к- возмущающим воздействиям позволяет применять малые значения пробного
1466509 ,4
по окончании импульса с четвертого выхода генератора 1, когда размыкаются оба кпюча 18 и 19. При характере переходного процесса в системе, соответствующем заданному (заданная степень затухания, определяемая отношением коэффициентов К1/К2), выходное напряжение на выходе интегра-- -г-1,- ., .члч-« j.iv 1и xjuiy vj CI -rinittlUcl
- 10 тора 6, не изменится и не изменится коэффициент усиления регулятора 3.
При отклонении характера
0
5
переходного процесса от заданного, например, при увеличении колебательности (
5 шении затухания), относительный вкпад от второго канала с козффигщ- ентом К2 увеличится, суммарный сигнал на входе интегратора 6 перестанет быть равным нулю и изменится соответ0 ственно выходное напряжение интегратора, уменьшая коэффициент усиления регулятора 3 и восстанавливая характер переходного процесса.
2. При налргчии возмущений в системе и при малом (стремящемся к нулю) .значении пробного сигнала устройство будет работать также, как показано вьше, но сигнал u(t) в нем практически зависит только от возмущений в системе, поскольку пробный сигнал существенно меньше сигналов возмущений. Первое и все нечетные отклоне1шя u(t), по-прежнему, проходят по каналу усиления К1, а четные - по каналу К2 и соответственно проходят на интегратор 6 с разными весами. . Однако, так как знак первоначального .отклонения, определяемого возмущени- 0 ями, произволен, среднее значение сигнала на входе интегратора 6 остается равным нулю и его выходное напряжение не изменяется. Наличие возмущений не приводит к изменению ус- 5 тавки коэффициента усиления. Целенаправленного воздействия в данном случае также нет, поскольку пробный сигнал практически равен нулю.
3. В общем же случае при наличии и пробного сигнала и возмущений происходит суперпозиция этих двух случаев: наличие пробного снгндла приводит, как.описано в режиме 1, к появлению управляюпего воздействия, 5 результирующий же сигнал от возму- щений, как показано в режиме 2, равен нулю. Нечувствительность устройства к- возмущающим воздействиям позволяет применять малые значения пробного
5,/,
сигнала, не влияющие на качество регулирования ,
1
Формула изобретения
Самонастраивающаяся система регулирования, содержащая последовательно соединенные генератор .1х сигналов, элемент сравнения и регулятор с настраиваемым коэффициентом усиления, подключенный выходом по тг вЛоду объекта регулирования, выход, которого через блок обратной связи соединен со вторым входом элемента сравнения, третий вход которого является входом системы, управляющий вход регулятора с настраиваемым коэф- фицнеятом усиления подключен к выходу интегратора, отличающаяся тем, что, с целью повьппения точности и надежности снстекы в нее введены умножитель, элемент задержки, компаратор, инвертор, две дифференцирующие цепочки, два выпрямительных элемента, триггер, два элемента И, два ключа, два усилителя и сумматор, соеди ненный выходом со входом интегратора, второй выход генератора проб9
нь|х сигналов соединен с первым входом умножителя, второй вход которого подключен к выходу элемента срав- и входу компаратора, соединенного выходом со входом первой дифференцирующей цепочки и через инвертор - со входом второй дифференцирующей цепочки, выходы первой и второй дифференцирующих цепочек соединены соответственно через первый и второй выпрямительные элементы со счетным входом триггера, установочный вход которого соединен через элемент задержкн с третьим выходом генератора пробных сигналов, четвертый выход которого подключен к первым входам первого и второго элементов И, вторые входы которых соединены
соответственно с прямым и инверсным выходами триггера, выход умножителя соединен со входами первого к второго ключей, управляющие входы которых соединены соответственно с выходами первого и второго элементов И, выходы первого и второго кпючей соеинены соответственно через первый и второй усилители с первым и вторым выходами сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| СПОСОБ И СИСТЕМА ЧТЕНИЯ СОСТОЯНИЯ ЯЧЕЙКИ МАГНИТОРЕЗИСТИВНОЙ ПАМЯТИ С ПЕРЕНОСОМ СПИНА STT-MRAM | 2020 |
|
RU2746237C1 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |
| Система автоматического регулирования | 1978 |
|
SU752221A1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2363957C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
Изобретение предназначено для использования в замкнушк системах регулирования. Цель - повышение точности и надежности смсгемл. Для.достижения поставленной цели на вход системы подают и myльcныe npoeimie сигналы и по каждому пробному сигналу контролируют величину и знак отклонения регулируемого параметр а от задания. Затем амплитуду первой и всех нечетш х полуволн попучекного колебательного сигнала отклонения уменьшают относительно четных полуволн в соответствии с требуемой вели чиной коэффициента затухания сксте-. мы. Промасп1табированные таким образом сигналы отклонения суммируют и по интегралу суммарного сигнала корректируют величину коэффициента уси ления регулятора. При этом пробные сигналы могут формироваться в виде знакопеременной последовательности импульсов и тогда при смене знака пробного импульса знак полученного по нему отклонения регулируемого параметра инвертируют. Для уменьшения износа исполнительнь х механизмов объектов управления интервал между п6 дачей пробных импульсов 1я 1бирак т много больше дпительности переходного процесса. 2 ил. 0 рззз
Фиг.1
| Петров Б,Н., Рутковский В.Ю | |||
| и рр Принципы построения и проектирования самонастраивающихся систем управления | |||
| М.; Машиностроение, | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Беспоисковые самонастраивающиеся систеьь | |||
| М | |||
| : Наука, 1969, с | |||
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
