1U67726
Изобретение относится к электротехнике, в частности к вентильному электроприводу со стабилизацией частоты вращения., и может быть использовано в приводах робототехнических систем.
Цель изобретения - улучшение качества регулирования путем повышения точности стабилизации частоты вращения в динамических режимах.
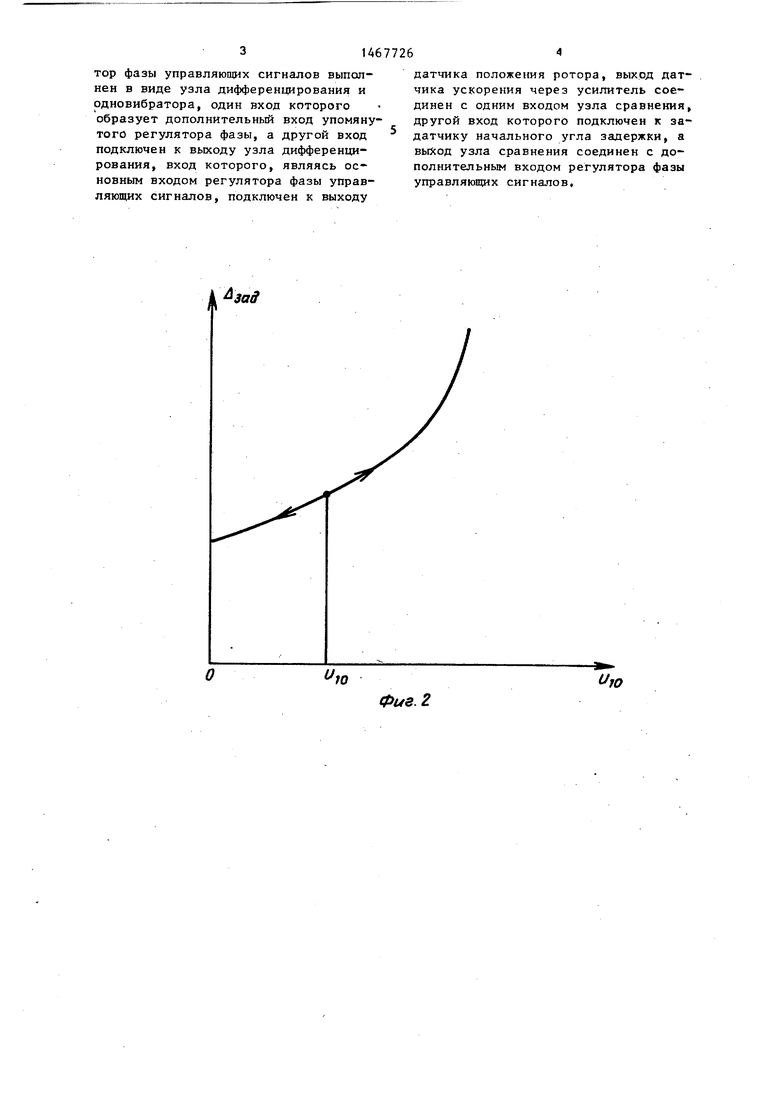
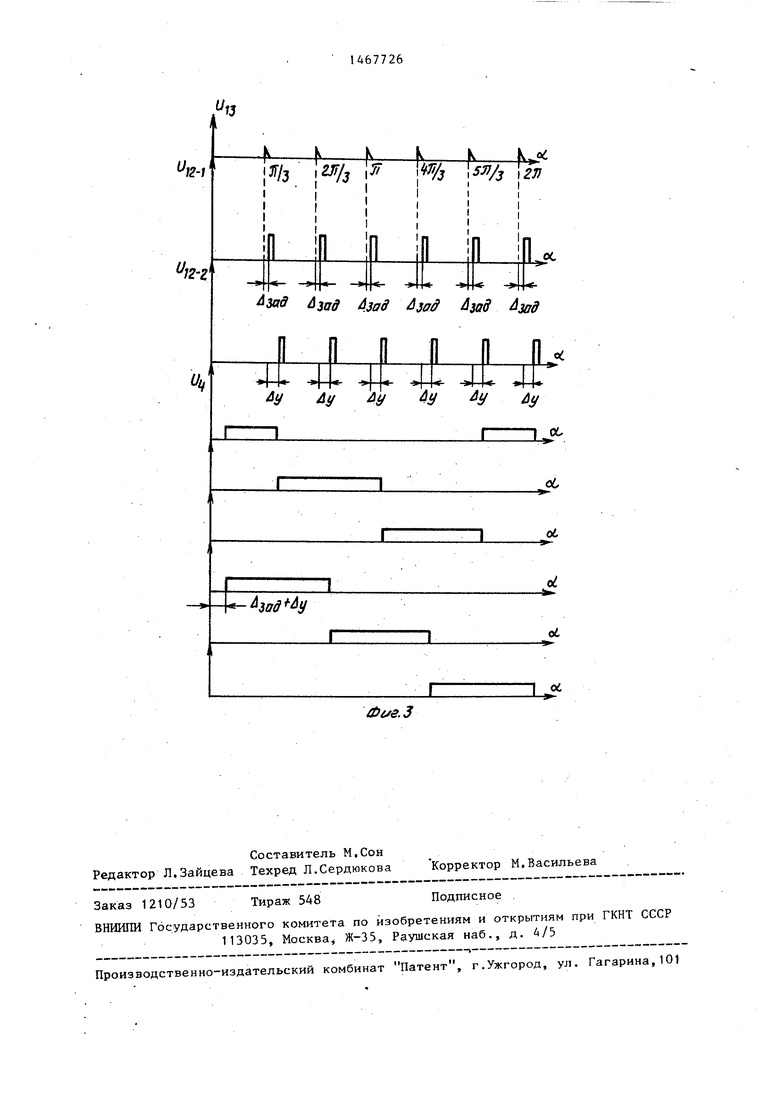
На фиг.1 представлена структурно- функциональная схема стабилизированного вентильного электр.опривода; на фиг. 2 - график з ависимости времени задержки от напряжения задания начального угла задержки; на фиг.З - временные диаграммы, поясняюшле рабо- .ту отдельных блоков электропривода.
10
15
нала U,Q., на постоянную величину и зад (Фнг.2 и 3), определяемую напряжением и(оэад здданил начального угла задержки, Глок 4 управления, воздействуя на тиристорный преобразователь 3 частоты, обеспечивает постоянньй угол нагрузки между напряжением питания и ЭДС фаз якорной обмотки синхронного электродвигателя 1.
В случае, когда изменяется частот вращения, на выходе датчика 9 ускорения появляется сигнал, который усили вается усилителем 8. Выходное напряжение усилителя 8 сравнивается с нап ряжением задания начального угла задержки и поступает на дополнительный вход 14 управляемого одновибратора 12, тем самым изменяя величину заСтабилизированный вентильный элек- п держки до значения Ду (Uje.j, фиг.З).
тропривод (фиг.1) содержит синхронный электродвигатель 1, якорная обмотка которого подключена к источнику 2 питания через тиристорньш преобразователь 3 частоты, управляющий вход которого подключен к выходу блока 4 управления, вход управления которого соединен с выходом регулятора 5 фазы управляющих сигналов, подключенного основным входом к выходу датчика 6 положения ротора, механически связанного с валом электродвигателя 1. Дополнительный вход регулятора 5 фазы управляющих сигналов подключен к выходу узла 7 сравнения, один вход которого подключен через усилитель 8 к.выходу датчика 9 ускорения, а дру гой подключен к задатчику 10 начального угла задержки.
Регулятор 5 фазы управляющих сигналов содержит узел 11 дифференцирования и управляемый одновибратор 12. При этом выход узла 11 дифференцирования соединен с основным входом 13 управляемого одновибратора 12, до25
30
35
40
При возрастании частоты вращения, при сбросе статической нагрузки задержка сигнала U увеличивается, тем самь1м увеличивая угол нагрузки синхронного электродвигателя и умень шая вращающий момент.
При уменьшении частоты вращения угол задержки сигнала уменьшается уменьшая угол нагрузки и увеличивая вращающий момент.
Таким образом, достигается улучше ние качества регулирования за счет повьш1ения точности стабилизации частоты вращения в динамических режимах
Формула изобретения
Стабилизированный вентильный электропривод,содержащий синхронный электродвигатель, якорная обмотка которого подключена к источнику пита ния через тиристорный преобразовател частоты, управляюш;ий вход которого подключен к выходу блока управления.
полнительный вход 14 которого образу-45 вход управления которого соединен ет дополнительньш вход регулятора 5 фазы управляющих сигналов, основной вход которого обр1азован входом узла 11 дифференцирования.
Стабилизированный вентильный электропривод работает следующим образом.
При постоянной частоте вращения
50
сигнал а на выходе датчика 9 ускорения.
отсутствует. -Датчик 6 положе-- ния ротора через узел 11 дифференци- .рования (U,j, фиг.З) периодически запускает управляемьй одновибратор 12, осуществляя задержку выходного сиг- I
55
с выходом регулятора фазы управляющи сигналов, подключенного основным вхо дом к выходу датчика положения ротора, механически связанного с валом синхронного электродвигателя, о т - личающийс я тем, что, С целью улучшения качества регулирования путем повьш1ения точности стабили зации частоты вращения в динамически режимах, в него дополнительно введены датчик ускорения, установленньй на валу синхронного электродвигателя усилитель, узел сравнения, задатчик начального угла задерзхки, а регуля
нала U,Q., на постоянную величину и зад (Фнг.2 и 3), определяемую напряжением и(оэад здданил начального угла задержки, Глок 4 управления, воздействуя на тиристорный преобразователь 3 частоты, обеспечивает постоянньй угол нагрузки между напряжением питания и ЭДС фаз якорной обмотки синхронного электродвигателя 1.
В случае, когда изменяется частота вращения, на выходе датчика 9 ускорения появляется сигнал, который усиливается усилителем 8. Выходное напряжение усилителя 8 сравнивается с напряжением задания начального угла задержки и поступает на дополнительный вход 14 управляемого одновибратора 12, тем самым изменяя величину задержки до значения Ду (Uje.j, фиг.З).
держки до значения Ду (Uje.j, фиг.З).
При возрастании частоты вращения, при сбросе статической нагрузки задержка сигнала U увеличивается, тем самь1м увеличивая угол нагрузки синхронного электродвигателя и уменьшая вращающий момент.
При уменьшении частоты вращения угол задержки сигнала уменьшается, уменьшая угол нагрузки и увеличивая вращающий момент.
Таким образом, достигается улучшение качества регулирования за счет повьш1ения точности стабилизации частоты вращения в динамических режимах.
Формула изобретения
Стабилизированный вентильный электропривод,содержащий синхронный электродвигатель, якорная обмотка которого подключена к источнику питания через тиристорный преобразователь частоты, управляюш;ий вход которого подключен к выходу блока управления.
вход управления которого соединен
с выходом регулятора фазы управляющих сигналов, подключенного основным входом к выходу датчика положения ротора, механически связанного с валом синхронного электродвигателя, о т - личающийс я тем, что, С целью улучшения качества регулирования путем повьш1ения точности стабилизации частоты вращения в динамических режимах, в него дополнительно введены датчик ускорения, установленньй на валу синхронного электродвигателя, усилитель, узел сравнения, задатчик начального угла задерзхки, а регуля3146
тор фазы управляющих сигналов выполнен в виде узла дифференцирования и рдновибратора, один вход которого образует дополнительный вход упомянутого регулятора фазы, а другой вход подключен к выходу узла дифференцирования, вход которого, являясь основным входом регулятора фазы управляющих сигналов, подключен к выходу
датчика положения ротора, выход датчика ускорения через усилитель соединен с одним входом узла сравнения, другой вход которого подключен к за- датчику начального угла задержки, а выход узла сравнения соединен с дополнительным входом регулятора фазы управляющих сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1989 |
|
SU1758822A1 |
| Электропривод переменного тока | 1989 |
|
SU1757041A1 |
| Вентильный электродвигатель | 1985 |
|
SU1267578A1 |
| Следящий вентильный электропривод | 1985 |
|
SU1277339A1 |
| Вентильный электропривод | 1987 |
|
SU1522371A1 |
| Вентильный электропривод | 1989 |
|
SU1640806A1 |
| Вентильный электродвигатель | 1980 |
|
SU951582A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Способ регулирования тока адаптивного электропривода | 1986 |
|
SU1372571A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
Изобретение относится к электротехнике и может быть использовано в робототехнике. Целью изобретения является улучшение качества регулирования путем повьшения точности стабилизации в динамических режимах. Стабилизированный вентильный электродвигатель снабжен датчиком 9 ускорения, установленным на валу синхронного двигателя 1, регулятором 5 фазы, управляющих сигналов, усилителем 8, углом сравнения 7. Якорная обмотка двигателя подключена к источнику питания 2 через тиристорный преобразователь 3 частоты, управление которым осуществляется по сигналам датчика 6 положения ротора через регулятор 5 и блок 4 управления. Регулятор 5 выполнен в виде соединенных между собой узла 11 дифференцирования и управляемого одновибратора 12. На вход 14 одновибратора подается сигнал с выхода узла 7 сравнения, а на вход 13 - сигнал с датчика 6 через узел 11. На входы узла 7 подаются сигналы с выходов датчика- 9 и задатчика 10 начального угла задержки, В электроприводе с изменением частоты вращения обеспечивается изменение угла нагрузки синхронного электродвигателя. Изменение частоты вращения фиксируется датчиком 9 ускорения, который выделяет сигнал на узел сравнения, где этот сигнал сравнивается с начальным углом задержки. Разностный сигнал поступает на одновибратор, который и изменяет задержку его выходного сигнала, В результате- обеспечивается блоком 4 изменение угла нагрузки синхронного двигателя 1, 3 ил. § (Л ю О5
А.а
и
10
tJjo
Фив. 2
Фие.З
| Бесконтактные электрические машины, Рига: Зинатне, вьш.24, 1985, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Электронная техника в автоматике | |||
| М.: Радио и связь, вып | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Приспособление для подвешивания тележки при подъемках сошедших с рельс вагонов | 1920 |
|
SU216A1 |
| Стабилизированный бесконтактный электропривод постоянного тока | 1972 |
|
SU474886A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
