4 05
vj
Ю
00
Изобретение относится к управлению электрическими машинами и может быть использовано при изготовлении и проверке шаговых двигателей.
Цель изобретения - повьшение точности и автоматизация калибровки.
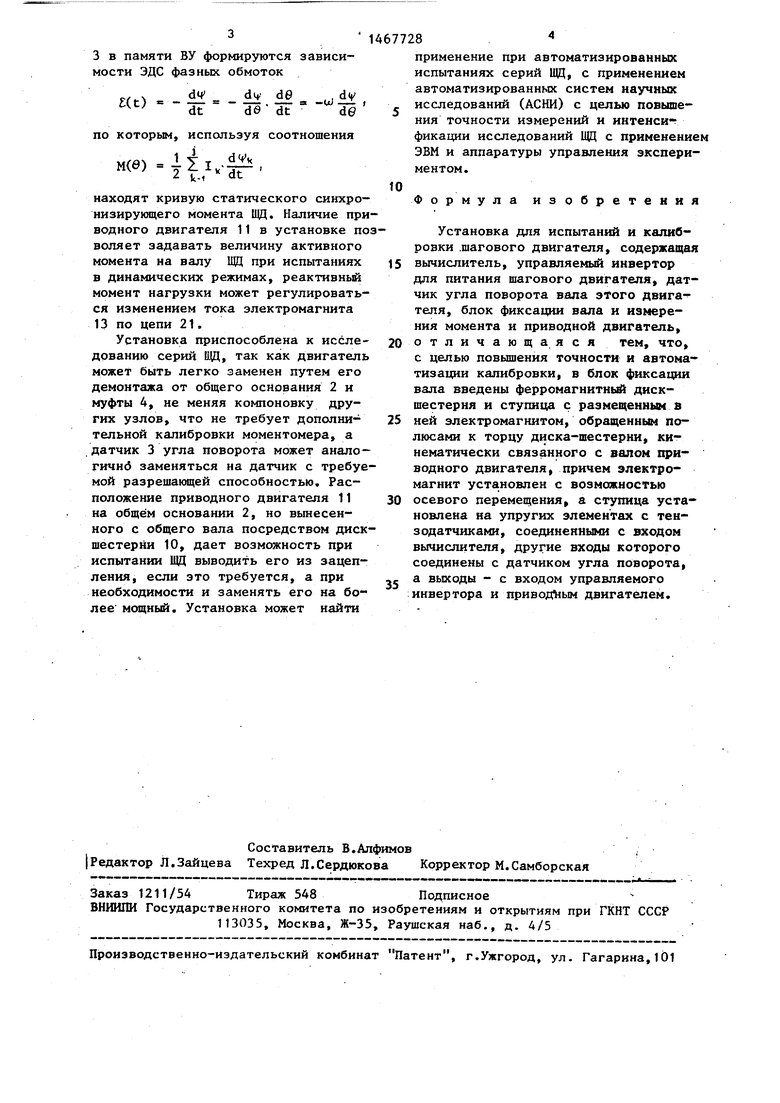
На чертеже показана схема установки.
Исследуемый двигатель (ЩЦ) 1 установлен на общем основании 2. Вал Ц 1 соединен с датчиком 3 угла поворота через муфты 4 и 5 и блок 6 иксации вала и измерения момента. Блок 6 включает в себя опоры 7, установленные на общем основании 2 с естко закрепленными в них калибро- ванньпум упруп ми элементами 8 с тен- зодатчиками 9, а также ферромагнит- ный диск-шестерню 10, механически соединенную с валом приводного двигателя 11, и ступицу 12, которая опирается на упругие элементы 8, а внутри нее расположен электромар- нит 13, механически соединенньй с валом и имеюисий возможность осевого перемещения в сторону диск-шестерни 10. В установку введено вычислительное устройство (ВУ) 14.
Первый вход ВУ 14 по цепи 15 соединен с выходом кодового датчика 3 угла поворота, второй вход по цепи 16 с выходом блока 6 фиксации вала и измерения момента, а третий вход по цепи 17 соединен с первым выходом управляемого инвертора 18 тока, второй выход которого по цепи 19 соединен с фазными обмотками ЩЦ.
Первый выход ВУ 14 по цепи 20 соединен с входом инвертора 19, второй выход по цепи 21 соединен с входом блока 6, а третий выход по цепи 22 соединен с входом системы управления приводным двигателем 11 (система управления не показана).
Установка работает следуюш 1м образом.
В автоматизированном режиме испытаний ЩЦ процедура калибровки шагового двигателя заключает;ся в измере НИИ зависимости фазных токов от поло жения вала двигателя.
По сигналу ВУ 14, управляющего хо дом калибровки, по цепи 20 инвертору 18 задаются коды требуемых уставок токов. Инвертор 18 по .цепи 19 формирует заданные токи в обмотках ЩЦ 1; Ротор двигателя устанавливается в заданное положение 9, которое конт10
15
20
25
ролируется датчиком 3 угла поворота. После установки ротора в заданное калибруемое положение ВУ 14 по цепи 21 подает сигнал на электромагнит 13, что приводит к перемещению ступицы 12 в осевом направлении в сторону диск-шестерни 10. Вгш ЩЦ фиксируется в заданном положении. Затем :ВУ 14 по цепи 22 подает сигнал на предварительно калиброванный приводной двигатель 11, который создает на валу ЩЦ активный момент нагрузки, не превьш1ающий момент фиксации.Крнт- ролируя уход ротора из заданного фиксированного положения 0 под действием момента нагрузки датчиком 3 и сигнал, пропорциональный моменту ЩЦ, поступающий по цепи 16 с выхода тен- зодатчиков 9, ВУ 14 определяет значение жесткости кривой статического синхронизирующего момента для заданных токов. Если жесткость ниже (выше) требуемой, ВУ 14 корректирует токи по цепи 20 в сторону их увеличения (или уменьшения) до достижения требуемой .
Аналогичные опыты проводят для всей заданной совокупности точек калибровки. В результате эксперимента в памяти ВУ 14 формируются зависимости ij (б), где j - количество фаз двигателя, полученные с учетом требуемой жесткости кривой статического синхронизирующего момента
Установка может быть использована для снятия кривой статического синхронизирующего момента ЩЦ согласно методике, состоящей в измерении моментной характеристики при заторможенном выходном вале двигателя при иЭменении рассогласования магнитных осей статора и ротора. Кроме того, установка может быть применена для косвенного измерения зависимости М (в) по ЭДС вращения. Алгоритм :освенного измерения моментной характеристики в этом случае следукяций.
По сигналу ВУ 14, поступающему по цепи 22, задается скорость вращения (iv) приводного двигателя 11, которая вычисляется ВУ 14 с использованием информации, поступающей по цепи 15с выхода датчика 3 угла поворота.
Регистрируя значения ЭДС фазных обмоток, поступающие в ВУ 14 по цепи 17, и угол поворота по датчику
30
35
40
45
55
3 в памяти ВУ формируются зависимости ЭДС фазных обмоток
ац;
dt
de
dt
,
de
которым, используя соотношения
1
м(0)
dVk
находят кривую статического синхронизирующего момента ЩЦ. Наличие приводного двигателя 11 в установке поволяет задавать величину активного момента на валу ЩЦ при испытаниях в динамических режимах, реактивньЁ момент нагрузки может регулироваться изменением тока электромагнита 13 по цепи 21.
Установка приспособлена к исследованию серий ИЩ, так как двигатель может быть легко заменен путем его демонтажа от общего основания 2 и муфты 4, не меняя компоновку других узлов, что не требует дополнительной калибровки моментомера, а датчик 3 угла поворота может анало- гичнб заменяться на датчик с требуемой разрешающей способностью. Расположение приводного двигателя 11 на общем основании 2, но вынесенного с общего вала посредством диск- шестерни 10, дает возможность при испытании ЩД выводить его из зацепления, если зто требуется, а при необходимости и заменять его на более мощный. Установка может найти
1467728
применение при автоматизированных испытаниях серий ЩЦ, с применением автоматизированных систем научных исследований (АСНИ) с целью повыше - ния точности измерений и интенси фикации исследований ЩЦ с применением ЭВМ и аппаратуры управления экспериментом.
10
Формула изобретения
Установка для испытаний и калибровки .шагового двигателя, содержащая вычислитель, управляемый инвертор для питания шагового двигателя, датчик угла поворота вала этого двига- теля, блок фиксации вала и измерения момента и приводной двигатель, отличающаяся тем, что, с целью повышения точности и автоматизации калибровки, в блок фиксации вала введены ферромагнитной диск- шестерня и ступица с размещенным в ней электромагнитом, обращенным полюсами к торцу диска-щестерни, кинематически связанного с валом приводного двигателя, причем электромагнит установлен с возможностью осевого перемещения, а ступица установлена на упругих элементах с тен- зодатчиками, соединенными с входом вычислителя, другие входы которого соединены с датчиком угла поворота, а выходы - с входом управляемого инвертора и приводным двигателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки многофазного электродвигателя | 1987 |
|
SU1431031A1 |
| Установка для испытаний и калибровки линейного шагового двигателя | 1988 |
|
SU1541753A1 |
| Способ определения статического синхронизирующего момента шагового двигателя | 1988 |
|
SU1548838A1 |
| Способ калибровки электрической машины бесконтактного двигателя постоянного тока | 1984 |
|
SU1229943A1 |
| Способ калибровки шагового электродвигателя | 1977 |
|
SU653713A1 |
| ЗУБЧАТО-РЕЕЧНАЯ ПРИВОДНАЯ СИСТЕМА ДЛЯ НЕСКОЛЬКИХ НАПРАВЛЯЮЩИХ ОПОР | 2008 |
|
RU2481263C2 |
| СПОСОБ УПРАВЛЕНИЯ M-ФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА С 2M-ТИРИСТОРНЫМ КОММУТАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2092965C1 |
| Устройство для управления шаговым двигателем | 1975 |
|
SU699646A2 |
| СПОСОБ УПРАВЛЕНИЯ M-ФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА С 2M ТИРИСТОРНЫМ КОММУТАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2088034C1 |
| Стенд для испытания передач | 1983 |
|
SU1096516A1 |
Изобретение относится к электротехнике. Целью изобретения является повышение точности испытаний и автоматизация калибровки двигателей. Установка содержит подключенный к управляемому инвертору 18 тока исследуемьй двигатель 1, выходной вал которого жестко соединен с датчиком угла поворота 3, блок 6 фиксации вала и измерения момента и приводной двигатель 11. Блок 6 фиксации вала и измерения момента выполнен в виде ферромагнитного диска - шестерни 10, кинематически связанного с валом приводного двигателя 11, и ступицы 12 с размещенным внутри нее электромагнитом 13, установленной на упругих элементах 8 с тензодатчиками 9, при этом электромагнит 13 соединен с общим валом установки. 1 ил. с (Л
| Устройство для измерения величины шага и статической погрешности обработки шага | 1986 |
|
SU1387168A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дискретный электропривод с шаговыми двигателями | |||
| / Под ред | |||
| М.Г.Чи- ликйна | |||
| - М.: Энергия, 1971, с | |||
| Дисковая паровая турбина | 1922 |
|
SU580A1 |
