Изобретение относится к электротехнике, в частности к измерению характеристик шаговых двигателей и управлению электрическими машинами, и может быть использовано в испытательных установках для определения характеристики статического синхронизирующего момента шаговых двигателей (ШД) в автоматизированном режиме при управлении ходом эксперимента от ЭВМ.
Цель изобретения состоит в повышении точности и автоматизации измерений .
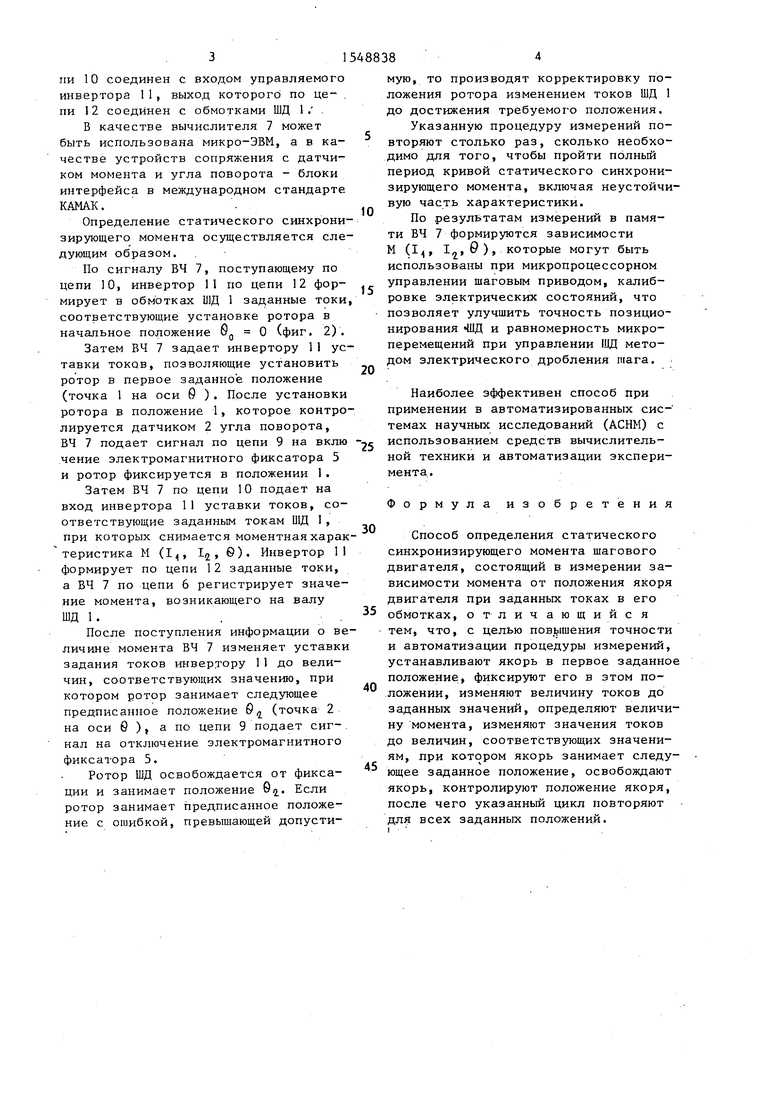
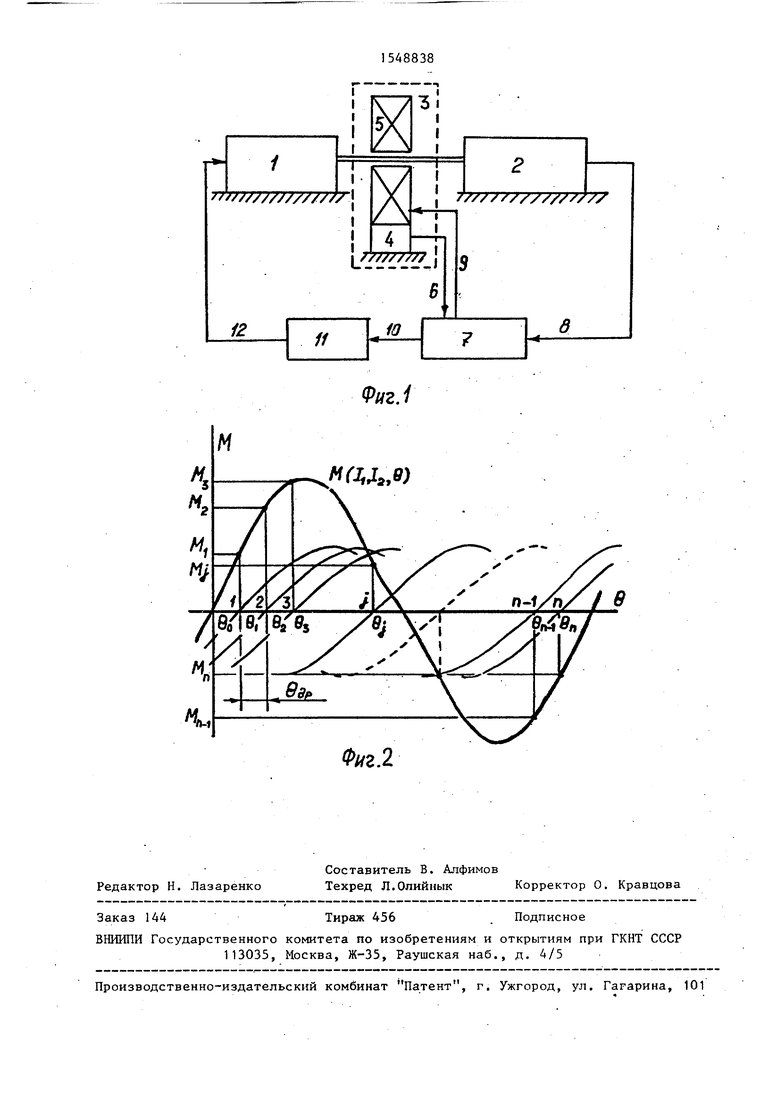
На фиг. 1 представлена схема устройства, реализующего способ при испытаниях вращающегося двухфазного магнитоэлектрического ШД; на фиг. 2 - зависимости М (i(,i2,9), поясняющие алгоритм определения характеристики.
ШД 1 (фиг. 1) соединен с датчиком угла 2 поворота через блок 3 фиксации вала и измерения момента, в состав которого входит датчик 4 момента и электромагнитный фиксатор 5. Выход датчика 4 момента по цепи 6 соединен с первым входом вычислителя (ВЧ) 7, второй вход которого по цепи 8 соединен с выходом датчика 2 угла поворота.
Первый выход ВЧ 7 по цепи 9 соединен с входом электромагнитного фиксатора 5, а второй выход ВЧ 7 по цеQ1
Јъ
оо
00
оо
00
10
15
20
31548838
ли 10 соединен с входом управляемого инвертора 11, выход которого по цепи 12 соединен с обмотками ШД 1 .
В качестве вычислителя 7 может быть использована микро-ЭВМ, а в качестве устройств сопряжения с датчиком момента и угла поворота - блоки интерфейса в международном стандарте КАМАК.
Определение статического синхронизирующего момента осуществляется следующим образом.
По сигналу ВЧ 7, поступающему по цепи 10, инвертор 11 по цепи 12 формирует в обмотках ШД 1 заданные токи, соответствующие установке ротора в начальное положение 0Q 0 (фиг. 2).
Затем ВЧ 7 задает инвертору 11 уставки токов, позволяющие установить ротор в первое заданное положение (точка 1 на оси б ). После установки ротора в положение 1, которое контролируется датчиком 2 угла поворота, ВЧ 7 подает сигнал по цепи 9 на вклю чение электромагнитного фиксатора 5 и ротор фиксируется в положении 1.
Затем ВЧ 7 по цепи 10 подает на вход инвертора 11 уставки токов, соответствующие заданным токам ШД 1, при которых снимается моментная харакеристика М (1, 12 , б)- Инвертор 11 формирует по цепи 12 заданные токи, а ВЧ 7 по цепи 6 регистрирует значение момента, возникающего на валу
ШД 1.
После поступления информации о величине момента ВЧ 7 изменяет уставки задания токов инвертору 11 до величин, соответствующих значению, при котором ротор занимает следующее предписанное положение Q (точка 2 на оси б ), а по цепи 9 подает сигнал на отключение электромагнитного фиксатора 5.
Ротор ШД освобождается от фиксации и занимает положение У. Если ротор занимает предписанное положение с ошибкой, превышающей допусти25
30
35
40
45
му ло до
вт ди пе зи ву
ти М ис уп ро по ни пе до
пр те ис но ме
Ф
си дв ви дв об те и ус по ло за ну до ям ющ як по дл
0
5
0
5
0
5
0
5
мую, то производят корректировку положения ротора изменением токов ШД 1 до достижения требуемого положения.
Указанную процедуру измерений повторяют столько раз, сколько необходимо для того, чтобы пройти полный период кривой статического синхронизирующего момента, включая неустойчивую часть характеристики.
По результатам измерений в памяти ВЧ 7 формируются зависимости М (,(, 1,0), которые могут быть использованы при микропроцессорном управлении шаговым приводом, калибровке электрических состояний, что позволяет улучшить точность позиционирования -ШД и равномерность микроперемещений при управлении ШД методом электрического дробления шага.
Наиболее эффективен способ при применении в автоматизированных сие- темах научных исследований (АСНМ) с использованием средств вычислительной техники и автоматизации эксперимента.
Формула изобретения
Способ определения статического синхронизирующего момента шагового двигателя, состоящий в измерении зависимости момента от положения якоря двигателя при заданных токах в его обмотках, отличающийся тем, что, с целью повышения точности и автоматизации процедуры измерений, устанавливают якорь в первое заданное положение, фиксируют его в этом положении, изменяют величину токов до заданных значений, определяют величину момента, изменяют значения токов до величин, соответствующих значениям, лри котором якорь занимает следующее заданное положение, освобождают якорь, контролируют положение якоря, после чего указанный цикл повторяют для всех заданных положений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для испытаний и калибровки линейного шагового двигателя | 1988 |
|
SU1541753A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Установка для испытаний и калибровки шагового двигателя | 1987 |
|
SU1467728A1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ (ВАРИАНТЫ) | 2008 |
|
RU2395889C2 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Способ калибровки многофазного электродвигателя | 1987 |
|
SU1431031A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1612372A1 |
| Устройство для управления шаговым двигателем | 1985 |
|
SU1541560A1 |
| Способ определения характеристик статического синхронизирующего момента электрических шаговых двигателей | 1961 |
|
SU141937A1 |
Изобретение относится к электротехнике и предназначено для измерения характеристик шаговых двигателей и управления электрическими машинами. Цель изобретения - повышение точности и автоматизации измерений. Способ заключается в измерении зависимости статического синхронизирующего момента от положения якоря при заданных токах. При этом устанавливают якорь в первое заданное положение, фиксируют его, изменяют величину токов до заданных значений, определяют величину момента, изменяют значение токов до величин, соответствующих значению, при котором якорь занимает следующее предписанное положение, освобождают якорь, контролируют положение якоря, после чего процедуру измерений повторяют для всех заданных положений, включая неустойчивую часть характеристики. При перемещении ротора не требуется приводного двигателя. 2 ил.
мг м.
мъь,в)
Фиг.2
Редактор Н. Лазаренко
Составитель В. Алфимов
Техред Л.Олийнык Корректор О. Кравцова
Заказ 144
Тираж 456
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Фиг.1
Подписное
| Дискретный электропривод с шаговыми двигателями./Под ред | |||
| М.Г | |||
| Чили- кина | |||
| - М.: Энергия, 1971, с | |||
| Устройство для отбора проб вьюнообразной стружки цветных металлов | 1976 |
|
SU578581A1 |
| Способ измерения угловой моментной характеристики шагового электродвигателя | 1984 |
|
SU1191848A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
