Изобретение относится к электрическим машинам и может быть использовано для автоматизированного определения характеристик шагового дни- гателя.
Цель изобретения - расширение функциональных возможностей путем использования способа применительно к шаговому двигателю,
На фиг.1 представлена схема устройства, реализующего способ калиб- р|овки двухфазного магнитоэлектричес- шагового двигателя (ШД) типа 411И-200; на фиг.2 - алгоритм калиб- ровки.
На основании 1 установлен привод- HJoii двигатель 2, выходной вал кото- р|ого жестко соединен с ротором ЩЦ 3. В)торой выход вала ШД связан с валом кЗДового датчика 4 положе}шя. На валу ШД установлен электромагнитный фиксатор So
Управление ходом калибровки осуществляется вычислительным устройст- вом (ВУ) 6, в качестве которого может быть использована микроЭВМ HERA-60, а в качестве устройств сопряжения с объектом и датчиками сигналов - блоки в международном стандарте КАМАК.
; Калибровка осуществляется следую- и(Им образом,
: Предварительно проводят экспери- по определению потокосцеплений оЬмотйк ИЩо Для этого по сигналу ВУ 6: включают приводной двигатель 2 и приводят во вращение с постоянной скоростью вал шагового двигателя при отсутствии тока в его обмотках.
Регистрируют зависимость ЭДС ф1азных обмоток ЩЦ от положения ротора
Е, Е.(б); Ej Ej(0),
где Б, и Е„ - ЭДС фазных обмоток
двухфазного ЩЦ ДШИ-200 О - угловое положение ротора
Затем ВУ 6, используя полученные зависимости, определяют значе1ше потокосцеплений каждой из фазных обмоток статора с полем ротора при отсутствии тока в фазных.обмотках статора. После этого отключают, при- водной двигатель 2, устанавливают ротор ЩЦ. В первое калибруемое положение и включают электромагнитный
фиксатор 5. ВУ 6 формирует скачок напряжения заданной амплитуды на каждую из фаз двигателя поочередно и регистрирует переходную характеристику тока каждой из фаз двигателя. По результатам измерения переходной характеристики находят изменение потокоецепления каждой из фазных обмоток ЩЦ при изменении тока в ней, ирпользуя соотношение UVj(ij,0) (V-TR)dt, (1)
где (ij(9J - изменение потокоецепления, обуслрв- ленное изменением фазного тока;
V - амплитуда скачка напряжения;
j - номер фазы статора;
t - время аппара.тной регистрации переходной характеристики.
Опыты повторяют для п положений ротора на одном полюсном делении.
По результатам измерения потокоецепления обмоток получают 2п-зави- симостей вида
V,(i,,0,: V,(S,)+&v(i,,0,), (2(1г,0,)г(9,),0,
V, (1,,0,) ф,(0„)+&Ф,(1,,0,), (.6) ) + .6,) (2)
где CfJ, (0,) н Lf() - потокоецепления первой и втор.ой обмоток статора с полем IsoTopa при отсутствии токов в обмотках статора;
Qf, (i, ,б,) - потокосцепле- ние первой обмотки при Q const
tt (i,j,0|) - потокосцепление второй обмотки.
С учетом полученной совокупности зависимостей определяются коэффициенты Apg, Bpg аппроксимирующей формулы вида
3
р .р «
V,(I,0) I ( Z.Apg cos(ge) + t-o
Bpg sin (gO) ,(3)
где Apg, Bpg - коэффициенты паан- нома, полученные по результатам интерполяции экспериментальных кривых потокосцепления,
Р, Q 0,1,0., - коэффициенты,
учитывающие нелинейный характер кривой намагничивания и наличие ВЫС1ЯИХ гарно ник о
HsaecTiio, что магнитную коэнергию системы можно определить зная потокосцепления обмоток и используя соотношение . ,
i,4 2
Wj, (i,,i,e; f (ij,Q;dij
. л
0,0 г
la
(у, (i,,9)di, + jq;()di,,, (4)
где W (i,, L ,9)
- магнитная коэ- нергия системы.
Жесткость установки ротора находят с учетом соотношения
K(ii,i2,e)
() (5) 9Q2
Зависимости К (i,, () Для
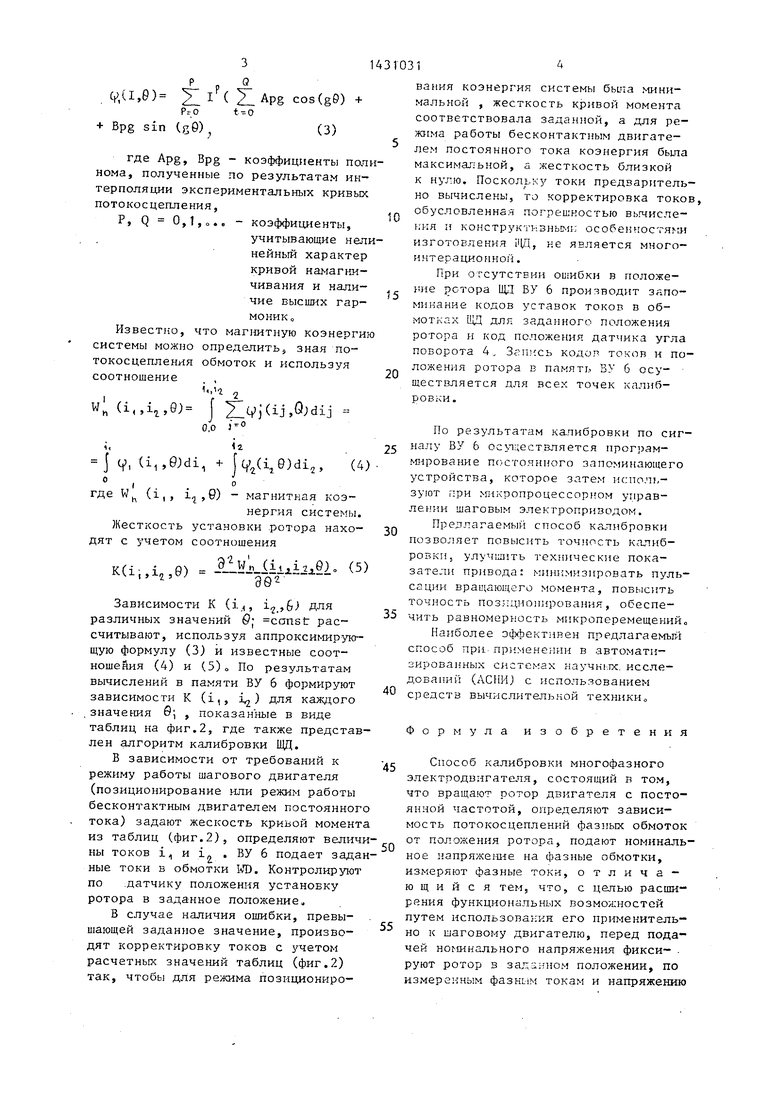
различных значений Q- canst рас считывают, используя аппроксимирующую формулу (3) и известные соот- ношейия (4) и (5)о По результатам вычислений в памяти ВУ 6 формируют зависимости К (i,, i) для каждого ,значеьшя 0; , показанные в виде таблиц на фиг.2, где также представлен алгоритм калибровки ЩД.
В зависимости от требований к режиму работы шагового двигателя (позиционирование или режим работы бесконтактным двигателем постоянного тока) задают жескость кривой момента из таблиц (фиг. 2) 5 определяют величи ны токов i и 1„ . ВУ 6 подает задан ные токи в обмотки 1Л). Контролируют по .датчику положения установку ротора в заданное положение,
В случае наличия ошибки, превышающей заданное значение, производят корректировку токов с учетом расчетных значений таблиц (фиг.2) так, чтобы д.пя режима позициониро1431031
0
5
0
5
0
5
0
5
.
вания коэнергия системы быпа минимальной , жесткость кривой момента соответствовала заданной, а для режима работы бесконтактным двигателем постоянного тока коэнергия была максимальной, а жесткость близкой к нулю. Поскольку токи предварительно вычислены, то корректировка токов, обусловленная погрешностью вычисления и конструктивным ; ocoбeн rocтя J изготовления 1ЦД, не является много- интерационнон.
При отсутстЕии оо;ибки В положе- ние ротора ЩД ВУ 6 производит запоминание кодов уставок токов в обмотках ЩД для заданного положения ротора и код положения датчика угла поворота 4, Згш .сь КОДОР токов и положения ротора в память ВУ 6 осуществляется для всех точек калиб- ров;ш.
По результатам калибровки по сигналу ВУ 6 ос пцеСТЕЛЯется 11рог)ам- мирование пг)стояниого запоминающего устройства, которое затем испо.ш,- при М1кропроцессорном управлении шаговым электроприводом.
Предлагаемый способ калибровки позволяет повысить точность калибровки улуч1:1ить технические показатели привода: минимизировать пульсации вращающего момента, повысить точность поз.чдиоилрования, обеспечить равномер} ость микроперемещений«
Наиболее эффективен предлагаемы способ при пр}{ енеинн в автоматизированных системах научнь.тх. исследований (ACHHJ с использованием средств вычислительной техникио
Формула изобретения
Способ калибровки многофазного электродвигателя, состоящий в том, что вращают ротор двигателя с постоянной частотой, определяют зависимость потокосцеплений фазных обмоток от положения ротора, подают номинальное иапряжеш1е на фазные обмотки, измеряют фазные токи, отличающийся тем, что, с целью расширения функциональных возможностей путем использования его применительно к шаговому двигателю, перед подачей нo шнaльнoгo напряжения фикси- . руют ротор в заданном положении, по измере -:ным фазным токам и напряжению
определяют зависимость потокосцепле- ния от фазных т.оков интегрированием по времени разности напряжения и активного падения напряжения на фазной обмотке и вычисляют коэнергию магнитной системы двигателя- для каждого заданного положения определяют дифференцированием коэнергии по углу статическую жесткость установки ро
тора для каждого заданного положения, расфиксируют ротор, полают в фазные обмотки токи, соответствующие заданной жесткости, контролируют установку ротора D заданное положение, при отклонении положения от заданного корректируют фазнр- е токи и после устранения отклонения регистрируют установившиеся значения токов.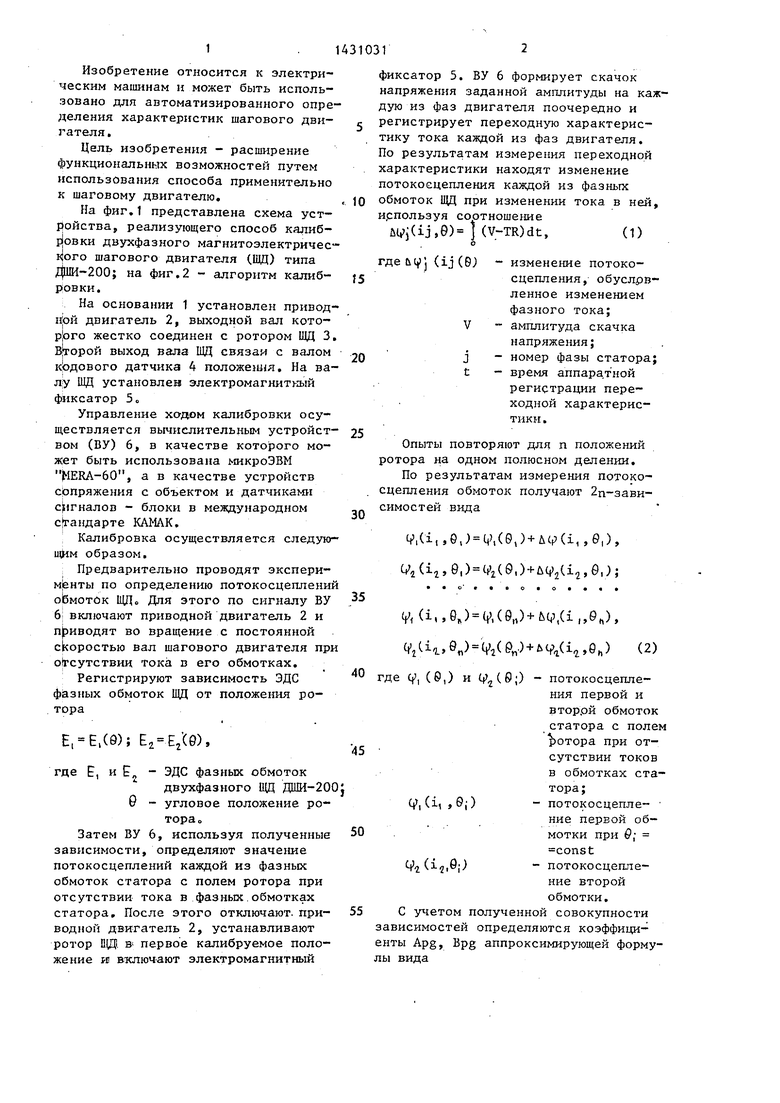
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для испытаний и калибровки шагового двигателя | 1987 |
|
SU1467728A1 |
| Установка для испытаний и калибровки линейного шагового двигателя | 1988 |
|
SU1541753A1 |
| Способ калибровки электрической машины бесконтактного двигателя постоянного тока | 1984 |
|
SU1229943A1 |
| Способ старт-стопного управления шаговым двигателем | 1986 |
|
SU1363417A1 |
| Электрический шаговый двигатель | 1990 |
|
SU1809506A1 |
| Способ регулирования скорости вращения автоматизированного частотно-управляемого электропривода и устройство для его осуществления | 1979 |
|
SU1043805A1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
| Устройство для управления электрической машиной с фазным ротором | 1977 |
|
SU720652A1 |
Изобретение относится к области электротехники, в частности к измерениям характеристик шаговых двига- . телей, и может быть использовано при калибровке шаговых двигателей с целью определения степени соответствия реальных ипаспортных параметровдви- гателей. Целью изобретения является расширение функциональных возможностей путем использования способа применительно к шаговому двигателю. Способ заключается в определении зависимости фазных токов от положения ротора, для чего определяют по- токосцепления обмоток двигателя в функции токов в обмотке и угла поворота ротора, по полученным данным для всех заданных положений ротора определяют величину магнитной коэнер- гии. Затем вычисляют значение жесткости установки ротора как функции токов в обмотках двигателя для каждого заданного положения ротора по известной величине коэнергии системы, подают в обмотки токи, соответствующие заданной жесткости, конт- ролируют установку ротора в заданное положение и при наличии отклонения положения ротора от заданного корректируют величину токов в обмотках. 2 ил. se
////////////
/fW/7/f7 ///// / ///
////// ////
фие. i
. . е„
( A gyg/.g ) ® - Задашеположенияpoffipfla &f
Опрсделе/ ие;
mpeSyeffffu жес/ггкос/7 и ij Вы5оо ком5иш(ий /nffKo us /пиулиа
оли/
Ояределение ,
ЛЛоИ KOMffuffaum
токов
3adaHuefnoKoS8o5wffjjfu. Ш
Зались fcada f токов и положения ротора
f feaii mffj / pp f
зг
с/ггкос (ий лиа
оли/
| Способ калибровки шагового электродвигателя | 1977 |
|
SU653713A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ калибровки электрической машины бесконтактного двигателя постоянного тока | 1984 |
|
SU1229943A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
