манду на коммутатор 14, который подключает к источнику 16 постоянного тока по цепям 19 и 15 вывод фазной обмотки 20. ВУ 8, используя полу1
Изобретение относится к электротехнике в частности к бесконтактным двигателям постоянного тока, и может быть использовано в регулируемых электроприводах с повьшенными требованиями к постоянству вращающего момента от угла поворота ротора.
Целью изобретения является повышение точности за счет уменьшения пбгрещности вычисления значений фазных токов.
Пульсации вращакщего момента бес- контактнрго двигателя постоянногб тока, вызванные взаимодействием высших гармонических составлякщих полей статора и ротора и технологическими погрешностями изготовления электрической машины можно исключить, питая фазные обмотки электрической машины двигателя токами, форму которых рассчитывают по формуле
a4 ;(ot)
rt
Ы Щ
(«
3oi
to
,2,3; ,2,3,
a для трехфазной электрической машины с симметричным питанием фазных обмоток
М
эм
3a j Cot) Ы
U)
- угол поворота poifopa;
- мгновенные значения токов в фазных обмотках электрической машины;
зависимости мгновенных значений потокосцеплений фазных обмоток статора с полем ротора;
- заданное значение среднего момента на валу двигателя.
ченные зависимости, рассчитывает формы токов обмоток 18 и 20 в зависимости от угла поворота ротора 3. 1 ил.
Для трехфазной электрической машины с раздельным питанием фазных обмоток ,2,3, для двухфазной машины ,2.
5 Мгновенное значение вращакщего момента электрической машины определяется по формуле
M(ci
( ., 9vj{c6)
) J.I
9oo
(3)
1де n - чи,сло фаз машины.
Функции потокосцеплений
Эл , в общем случае определяют не только
аспределением витков фазных обмо- ток и индукции ротора по расточке ашины, но и всеми неидеальностями и технологическими отклонениями реальной электрической машины от рас- счетного варианта.
Определяют зависимость потоко- сцепления каждой фазной обмотки .реальной электрической машины с полем ротора в функции угла поворота, затем, в зависимости от типа машины вычисляют формы фазных токов по одной из формул (1), (2) и запитывают фазные обмотки этими токами, при этом пульсации вращакщего момента, вызванные взаимодействием высших гармонических составляющих полей статора и ротора и технологическими отклонениями реальной электрической машины, устраняются.
Вращающий момент, создаваемый одной из фазных обмоток, определяется по формуле
«;(-)-5--l-MW- W
ij (oi)const
IViM aM-(i) 3ci (5)
., Поэтому, если запитать фазную обмотку электрической машины постоянным током и измерять вращающий момент на валу в функции угла пово3
рота ротора, то полученная зависимость вращающего момента тождественна зависимости потокосцепления фазной обмотки с полем ротора в фун ции угла.поворота ротора.
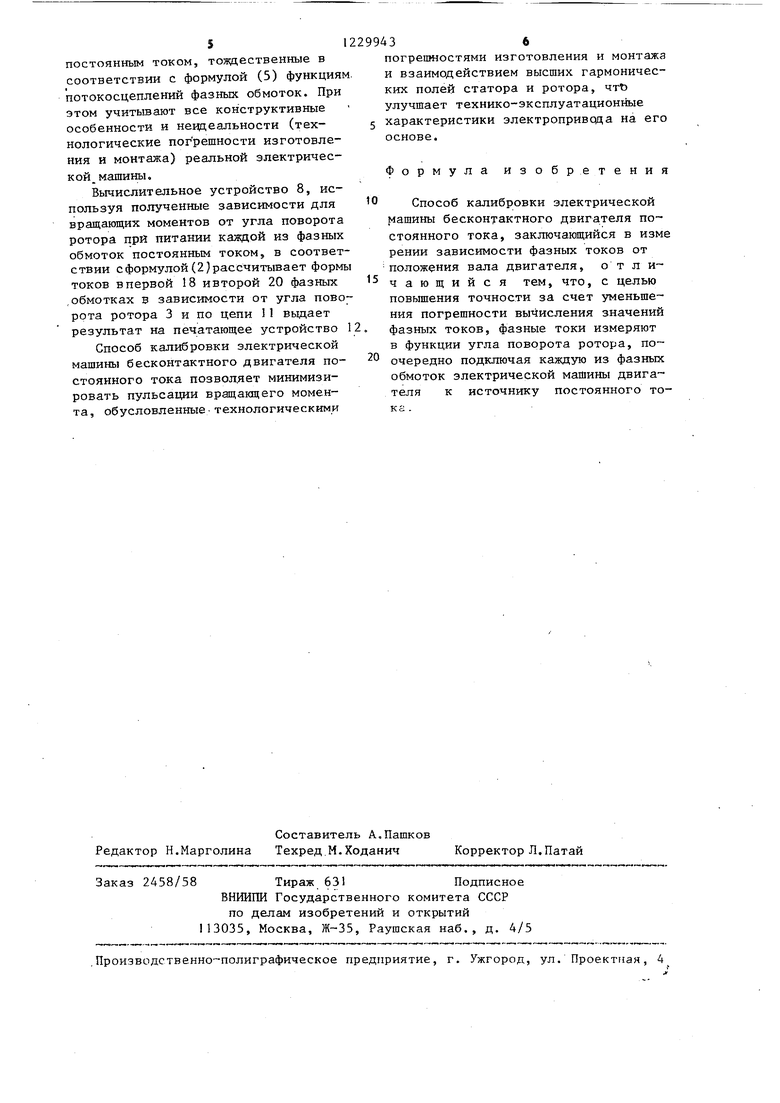
На чертеже изображена схема, поясняющая предлагаемый способ калибровки электрической машины бескон - тактного двигателя постоянното тока (процесс калибровки двухфазной магнитоэлектрической синхронной маши- .ны) .
На основании 1 установлен приводной механизм 2, выходной вал которого жестко соединен с ротором 3 электрической машины. Ротор 3 элек- i трической машины связан с входным :валом преобразователя 4 вал-код, :установленным на основании I, а статор 5 электрической машины подключе к измерителю 6 вращающего момента, который установлен на основании 1.
Измеритель 6 вращающего момента обеспечивает при измерении неподвижное положение статора 5 относительно основания 1. Это условие выполняется при использовании измерителей момента компенсационного типа, которые обеспечивают требуемую точ- ность измерения.
Вход приводного механизма 2 по цепи 7 соединен с первым выходом вычислительного устройства 8, первый вход которого по цепи 9 соединен с выходом преобразователя 4 вал код, а второй вход по цепи 10 соединен с выходом измерителя вращающего мбмента. Второй выход вычислительного устройства 8 по цепи 11 соединен с входом печатающего устройства 12, а третий выход по цепи 13 - с первым входом коммутатора 14, второй вход которого по цепи 15 соединен с первым выходом источника 16 постоянного тока.
Первый выход коммутатора 14 по цепи 17 соединен с первым выводом первой фазной обмотки 18, а второй выход по цепи 19 - с первым выводом второй фазной обмотки 20.
Вторые выводы первой и второй фазных обмоток соединены вместе и по цепи 21 подключены к второму выходу источника 16 постоянного тока..
Калибровка электрической машины бесконтактного двигателя постоянного тока осуществляется следующим образом.
299434
По сигналу с вычислительного устройства 8, поступающему по цепи 13, коммутатор 14 подключает первый вывод первой фазной обмотки 18 по це- 5 пям 17 и 15 к первому выводу источ- ника 16 постоянного тока. Фазная обмотка запитывается постоянным током. По цепи 7 вычислительное устройство вьщает сигнал управления на вход 10 приводного механизма 2, который от- ключивщись, вращает ротор 3 электрической машины. Информация об угле поворота ротора 3 с преобразователем 4 вал-код по цепи 9 поступает на пер- 15 вый вход вычислительного устройства 8.
О моменте, развиваемом электрической машиной,- судят по реакции статора 5, измеряемой с помощью изме- . 20 рителя 6 момента. Выходной сигнал с измерителя 6 момента по цепи 10 поступает на второй вход вычислительного устройства 8.
Вычислительное устройство 8 фор- 25 мирует и запоминает зависимость вращающего -момента электрической машины от угла поворота ротора 3 при питании первой фазной обмотки 18 от источника 16 постоянного тока. 0 По окончании одного оборота ротора 3 заканчивается процесс измерения для первой фазной обмотки 18. После этого вычислительное устройство 8 по цепи 13 подает команду на ком- мутатор 14, который отключает первый вьгаод первой фазной обмотки 18 от первого выхода источника I6 постоянного тока и подключает к нему по цепям 19 и 15 первый вывод вто- Q :рой фазной обмотки 20. Процесс измерения повторяется, вычислительное устройство 8 формирует и запоминает зависимость вращакщего момента электрической машины от угла поворота ро- тора 3 при питании второй фазной -обмотки 20 от источника 16 постоянного тока.
: После второго оборота ротора 3 заканчивается.процесс измерения для 0 второй фазной обмотки 20.
По окончании измерений вычислительное устройство 8 по цепи 7 отключает приводной механизм.
В результате измерений в вычис- 5 лительном устройстве формируются и запоминаются зависимости врацакщих моментов от угла поворота ротора при питании каядой из фазных обмоток
постоянным током, тождественные в соответствии с формулой (5) функциям потокосцеплений фазных обмоток. При этом учитывают все конструктивные особенности и невдеапьности (технологические погрешности изготовления и монтажа) реальной электрической машины.
Вычислительное устройство 8, используя полученные зависимости для вращающих моментов от угла поворота ротора при питании каждой из фазных обмоток постоянным током,, в соответствии сформулой(2)рассчитывает формы токов впервой 18 ивторой 20 фазных .обмотках в зависимости от угла поворота ротора 3 и по цепи 11 вьщает результат на печатающее устройство 1
Способ калибровки электрической машины бесконтактного двигателя постоянного тока позволяет минимизировать пульсации вращаицего момента, обусловленные-технологическими
Составитель А.Пашков Редактор Н.Марголина Техред.М.Ходанич Корректор Л.Патай
Заказ 2458/58 Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
,
12299436
погрешностями изготовления и монтажа и взаимодействием высших гармонических полей статора и ротора, чтТ улучшает технико-эксплуатационные характеристики электропривода на его основе.
ормула изобретения
Способ калибровки электрической машины бесконтактного двигателя по стоянного тока, заключающийся в изме рении зависимости фазных токов от положения вала двигателя, о т л и- чающийся тем, что, с целью повьшения точности за счет уменьшения погрешности вычисления значений фазных токов, фазные токи измеряют в функции угла поворота ротора, поочередно подключая каждую из фазных обмоток электрической машины двигателя к источнику постоянного тока .
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки многофазного электродвигателя | 1987 |
|
SU1431031A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2025037C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2085017C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ И МАГНИТНЫМ ПОТОКОМ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2469459C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| Установка для испытаний и калибровки шагового двигателя | 1987 |
|
SU1467728A1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
Изобретение относится к электротехнике, к бесконтактным двигателям постоянного тока, и может быть использовано в регулируемых электроприводах с повышенными требованиями к постоянству вращающегося момента электрической машины. Цель изобретения - повьшение точности за счет уменьшения погрешности вычисления значения фазных токов. Для этого фазные токи измеряют в функции угла поворота ротора, поочередно подключая каждую из фазных обмоток электрической машины двигателя к источнику постоянного тока. Информация об угле поворота ротора 3 с преобразователем 4 вал-код по цепи 9 поступает на вход вычислительного устройства (ВУ) 8, туда же поступает сигнал с измерителя 6 момента. ВУ 8 формирует и запоминает зависимость вращающего момента машины от.угла поворюта ротора 3 при питании обмотки 18 от источника 16 постоянного тока. Далее по цепи 13 ВУ 8 подает коQ (Л
| Бродовский В.Н., Иванов Е.С | |||
| Приводы с частотно-токовым управлением | |||
| - М.: Энергия, 1974 | |||
| Способ калибровки шагового электродвигателя | 1977 |
|
SU653713A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
