Известные микроманипуляторы с кареткой для инструмента, перемещаемой в горизонтальной плоскости стержнем, установленным в шарнире Гука и представляющим вертикально расположенный пантограф, неудобны в работе из-за больщого передаточного числа пантографа. Другой недостаток известных микроманипуляторов заключается в том. что они не могут сообщить инструменту движения, совпадающего по направлению с перемещением рукоятки.
В -предлагаемом микроманипуляторе применены дополнительные стержни, 1планки, каретка и зубчатые колеса, определенное соединение которых между собой позволило уменьщить передаточное число пантографа и сообщить инструменту в поле зрения микроскола движение, совпадающее по направлению с перемещением рукоятки.
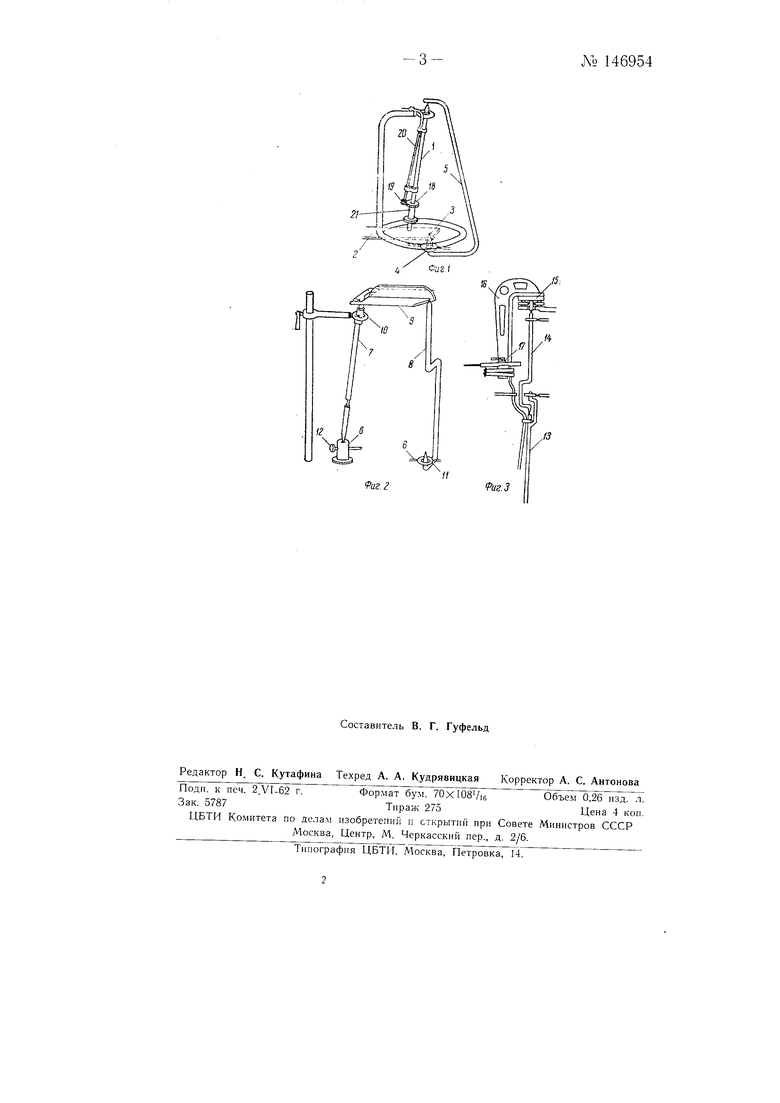
На фиг. 1, 2 и 3 изображены три варианта выполнения предлагае-, мого микроманипулятора.
На фиг. 1 микроманипулятор выполнен в виде вертикально расположенного пантографа, состоящего из стержня 1 и каретки 2 для инструмента. Каретка 2 перемещается в горизонтальной плоскости наконечником 3, установленным в щарнире 4 Гука. Для уменьщения передаточного числа пантографа используется второй стержень 5, последовательно включенный с первым стержнем 1.
На фиг. 2 изображен микроманипулятор, в котором для сообщения инструменту в поле зрения микроскопа движения, совпадающего по направлению с перемещением рукоятки 6, концы стержней 7 и 8 пантографа с одной стороны соединены при помощи планки 9. Стержни 7 и 8 подвещены на щарнирах 10 и 11 Гука. Перемещение инструмента в вертикальной плоскости осуществляется вращением винта 12.
146954-2На фиг. 3 оба стержня 13 и 14 микроманипулятора расположены друг над другом. На конце стержня /4 опирается каретка 15, которая при помощи кронштейна 16 жестко связана с зажимом 17 для крепления инструмента.
Для упрощения работы с микроманипулятором на конце стержня / расположено зубчатое колесо 18, которое вращается вручную и сцеплено с колесом 19. Колесо 19 размещено на валу 20, осуществляющим подъе.м инструмента микроманипулятора в вертикальной плоскости.
Предмет изобретения
1.Микроманипулятор с кареткой для инструмента, перемещаемой в горизонтальной плоскости стержнем, установленным в шарнире Гука и представляющим вертикально расположенный пантограф, отличающийся тем, что, с целью уменьшения передаточного числа пантографа, применен второй стержень 5, последовательно включенный с первым стержнем /.
2.Форма выполнения микро.манилулятора по л. 1, о т л и ч а ю щ а яс я тем, что, с целью сообщения инструменту в поле зрения микроскопа движения, совпадающего по направлению с перемещением рукоятки 6, конец стержня 7 и один из концов стержня 8 соединены планкой 9.
3.Форма выполнения микроманипулятора по п. 1, отличающаяся тем, что оба стержля 13 и 14 расположены друг над другом, а перемещаемая концом второго стержня 14 каретка 15 жестко связана кронштейном 16 с зажимом 17 для инструмента.
4.Форма выполнения .микроманипулятора по п. 1, и 3, отличающаяся тем, что конец первого стержня 21 или 13 несет на себе вращаемое рукою экспериментатора зубчатое колесо 18, сцепленное с колесом 19, сидящим на валу 20 .подъемного механизма для инструмента манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1935 |
|
SU46715A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38799A1 |
| Микроманипулятор | 1934 |
|
SU41217A1 |
| Механизм для управления движениями винтов микроманипулятора | 1947 |
|
SU75073A1 |
| МИКРОМАНИПУЛЯТОР | 1939 |
|
SU60382A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38800A1 |
| Прибор для автоматической обработки микроскопических объектов | 1936 |
|
SU54613A1 |
| Микроманипулятор | 1980 |
|
SU901974A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| Приспособление для управления движением микроинструмента микроманипулятора | 1935 |
|
SU46716A1 |