Известны авторулевые для управления судами, оборудованными электрическим управлением с аксиометром руля и гирокомпасом. Авторулевой включает в себя устройство для компенсации одпостороннего сноса, регулятор скорости перекладки руля, датчик курса и контактную систему с группой реле.
Описываемый авторулевой отличается тем, что он снабжен регулятором чувствительности и первичной перекладки руля, представляющим собой подвижный стол с веерообразными контактами и подвижным роликовым контактом, механически связаниым с датчиком сигнала обратной связи. В системе сигнализании ухода судна с курса применен поворотный диск с кольневыми коитактами, фиксируюш,ими курс судна. Предлагаемый авторулевой более прост по конструкции. Кроме того, для обеспечения изменения курса судна в предлагаемом авторулевом применен фазовращатель.
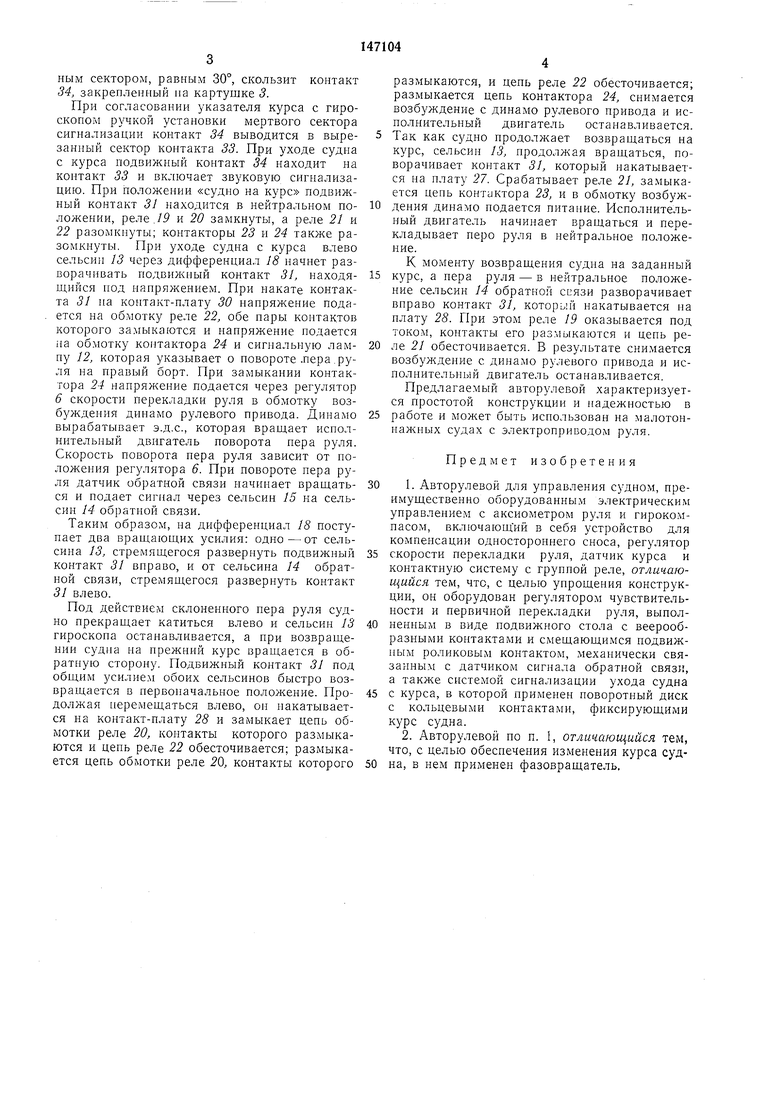
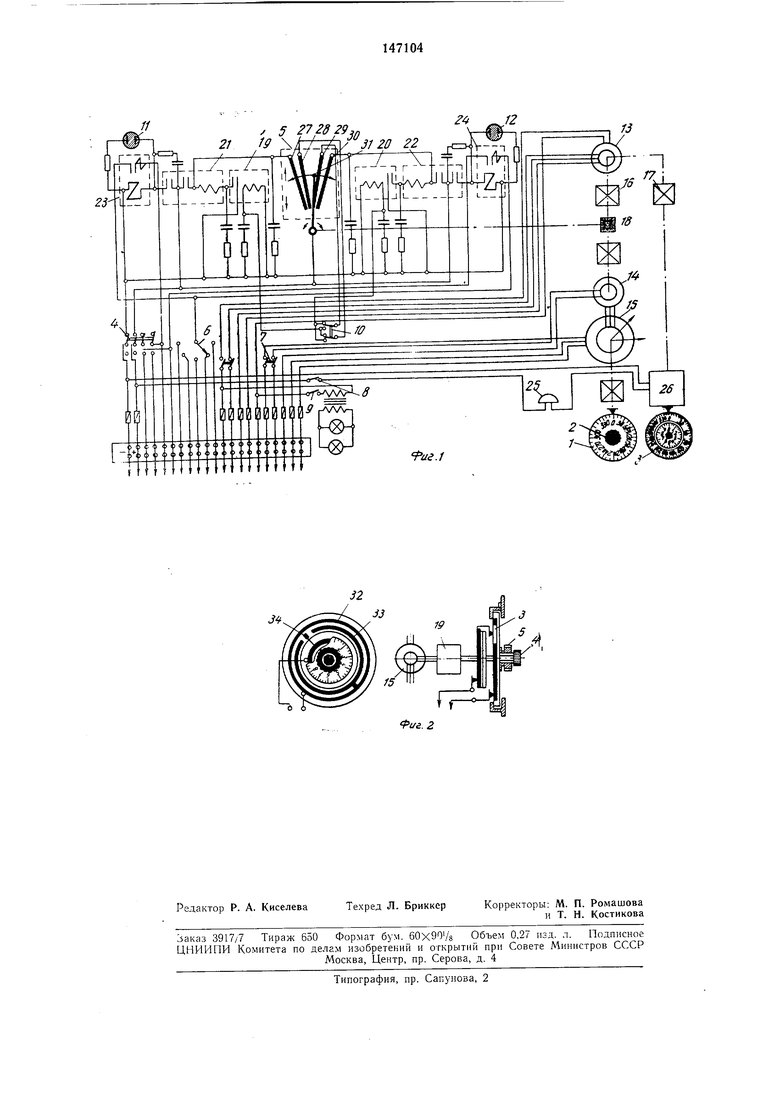
На фиг. 1 изображена электрическая схема авторулевого; на фиг. 2 - система сигнализации ухода судна с курса.
Авторулевой нредставляет собой электрическую следящую систему, работающую совместно с гидрокомпасами тина «Курс и «Амур, и предназначен для автоматического унравления судами типа «Тисса и других с электрической системой управления рулевыми механизмами. Управление авторулевым выведено на переднюю панель, на которой размещены: щкала 1 датчика курса с ручкой 2 установки, картущки 3 грубого и точного отсчета
репитера гирокомпаса с ручкой согласования и ручкой метрового сектора системы сигнализации, переключатель 4 с ручного управления на автоматическое, регулятор 5 чувствительности и первичной кладки руля, регулятор 6,
скорости перекладки руля, включатель 7 сельсинов, выключатель 8 системы сигнализации, выключатель У подсветки шкал, переключатель 10 режима работы авторулевого, сигпальные лампы 11 и 12. Электросхема авторулевого включает в себя следующие осиовные узлы: сельсин 13 гироскопа, сельсин 14 обратной связи, сельсин 15 с затормол-сенным ротором, редукторы 16 и 17, дифференциал 18, реле 19-22, контакторы 23 и 24, звонок 25 и
систему 26 сигнализации ухода судна с курса. Регулятор 5 чувствительности и первичной кладки руля выполнен в виде подвижного стола с веерообразными контактами-платами 27-30 и подвижным контактом 31. Система 26 сигнализации ухода судна с курса предназначена для сигнализации о выходе из строя авторулевого и представляет собой два кольцевых соединенных собой контакта 32 и 33, установленных на защитном
ным сектором, равным 30°, скользит контакт 34, закрепленный па картушке 3.
При согласовании зказателя курса с гироскопом ручкой установки мертвого сектора сигнализации контакт 34 выводится в вырезанный сектор контакта 33. При уходе судна с курса подвижный контакт 34 находит на контакт 33 и включает звуковую сигнализацию. При положении «судно на курс подвижный контакт 31 находится в нейтральном положении, реле,/9 и 20 замкнуты, а реле 21 и 22 разомкнуты; контакторы 23 и 24 также разомкнуты. При уходе судна с курса влево сельсин 13 через дифференциал 18 начнет разворачивать подвижный контакт 31, находящийся иод напряжением. При накате коитакта 31 па контакт-плату 30 напряжение подается на обмотку реле 22, обе пары контактов которого замыкаются и напряжение подается на обмотку коптактора 24 и сигнальную ламну 12, которая указывает о повороте .пера .руля на правый борт. При замыкании контактора 24 напряжение подается через регулятор 6 скорости перекладки руля в обмотку возбуждения динамо рулевого привода. Дипамо вырабатывает э.д.с., которая вращает исполнительный двигатель поворота пера руля. Скорость поворота пера руля зависит от положения регулятора 6. При повороте пера руля датчик обратной связи начииает вращаться и подает сигнал через сельсин 15 на сельсин 14 обратной связи.
Таким образом, на дифференциал 18 поступает два вращающих усилия: одно-от сельсина 13, стремящегося развернуть подвижный контакт 31 вправо, и от сельсина 14 обратной связи, стремящегося развернуть контакт 31 влево.
Под действием склоненного пера руля судно прекращает катиться влево и сельсин 13 гироскопа останавливается, а при возвращении судпа на прежний курс вращаеася в обратную сторону. Подвижный контакт 31 под общим усилием обоих сельсинов быстро возвращается в первопачальное положение. Продолжая перемещаться влево, ом накатывается на контакт-плату 28 и замыкает цепь обмотки реле 20, контакты которого размыкаются и цепь реле 22 обесточивается; размыкается цепь обмотки реле 2Q, контакты которого
размыкаются, и цепь реле 22 обесточивается; размыкается цепь контактора 24, снимается возбуждение с динамо рулевого привода и исполнительный двигатель останавливается. Так как судно продолжает возвращаться на курс, сельсин 13, нродолжая вращаться, поворачивает контакт 31, который накатывается на плату 27. Срабатывает реле 21, замыкается цепь контактора 23, и в обмотку возбуждения динамо нодается питапие. Исполнительный двигатель начинает вращаться и перекладывает перо руля в нейтральное положение.
К моменту возвращения судпа на заданный
курс, а нера руля - в нейтральное положение сельсин 14 обратной соязи разворачивает вправо контакт 31, который накатывается па плату 28. При этом реле 19 оказывается под током, контакты его размыкаются и цепь реле 21 обесточивается. В результате снилшется возбуждение с динамо рулевого привода и исполнительный двигатель останавливается.
Предлагаемый авторулевой характеризуется простотой копструкции и надежпостью в
работе и может быть использован на малотоннажных судах с электроприводом руля.
Предмет изобретения
1. Авторулевой для управления судном, преимущественно оборудованным электрическим управлением с аксиометром руля и гирокомпасом, включающий в себя устройство для компенсации одностороннего сноса, регулятор
скорости перекладки руля, датчик курса и контактную систему с грунной реле, отличающийся тем, что, с целью упрощения конструкции, он оборудован регулятором чувствительности и первичной перекладки руля, выполнепным в виде подвижного стола с веерообразными контактами и смещающимся подвижным роликовым контактом, механически связанным с датчиком сигнала обратной связи, а также системой сигнализации ухода судна
с курса, в которой применен поворотпый диск с кольцевыми контактами, фиксирующими курс судна.
2. Авторулевой по п. 1, отличающийся тем, что, с целью обеспечения изменения курса судна, в нем применен фазовращатель,
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ АВТОРУЛЕВОЙ «СИНИЦА» | 1966 |
|
SU179639A1 |
| СУДОВОЕ АВТОМАТИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО | 1966 |
|
SU180974A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Авторулевой | 1980 |
|
SU847813A1 |
| Электрогидравлическая рулевая машина | 1985 |
|
SU1294696A1 |
| АВТОРУЛЕВОЙ, РЕАЛИЗУЮЩИЙ ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН УПРАВЛЕНИЯ | 1968 |
|
SU213943A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ | 1972 |
|
SU337300A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
f---Si
Риг. 2
