ков во всем диапазоне работы ру.чя (.i30) в качеетве линейного датчика угла перекладки руля и предлагается данное устройетво.
Целью пзобретепня яв.чяется повышен не точноетп и надежностн авторулевого.
Это достигается тем, чт(; в автору;1евой, еодержапдей еельснн-датчнк угла нерекладj H руля п первый суммнрующпй уеплнте.чь, к первому, второму п Т1) входам которого подключат) соответственно задатчш; п датчик курса и датчик скорости изменения курса, введены )й суммпруюгп.нй усилитель, нослед(звате; Ы1о соединенные первый делитель иап)яжеиня, первый фазочувстзнтельпый выпрямнтель, не)вый одностор(инпй ограничнтель н нервьп иииерт 1руюн1,иГ1 ус 1литель, 1оследовательн(; соеднненш и;; второй дел1ггель наиряжения, второй фазс;чуветвптельиый выпрямитель, второй одгосторонипй ограничитель н второй инвертирующий уеплитель, последовательио соединенные третий делитель иапряжеипя, третий фазочувстБительиый выпрямитель п двусторонний ограи 1читель, нричем входы ;1,ел11телей напряжения соединены с соотвегствуюии1мп выходами сельсниа-датчика угла перекладки руля, выход второго еуммирующего Зеилителя подключеи к четве)тому входу первого еуммируюп;его усилителя, а первый, второй и третий входы- - к выходам еоответетвешю первого и второго инвертирующих усилителей и двустороннего ограничителя.
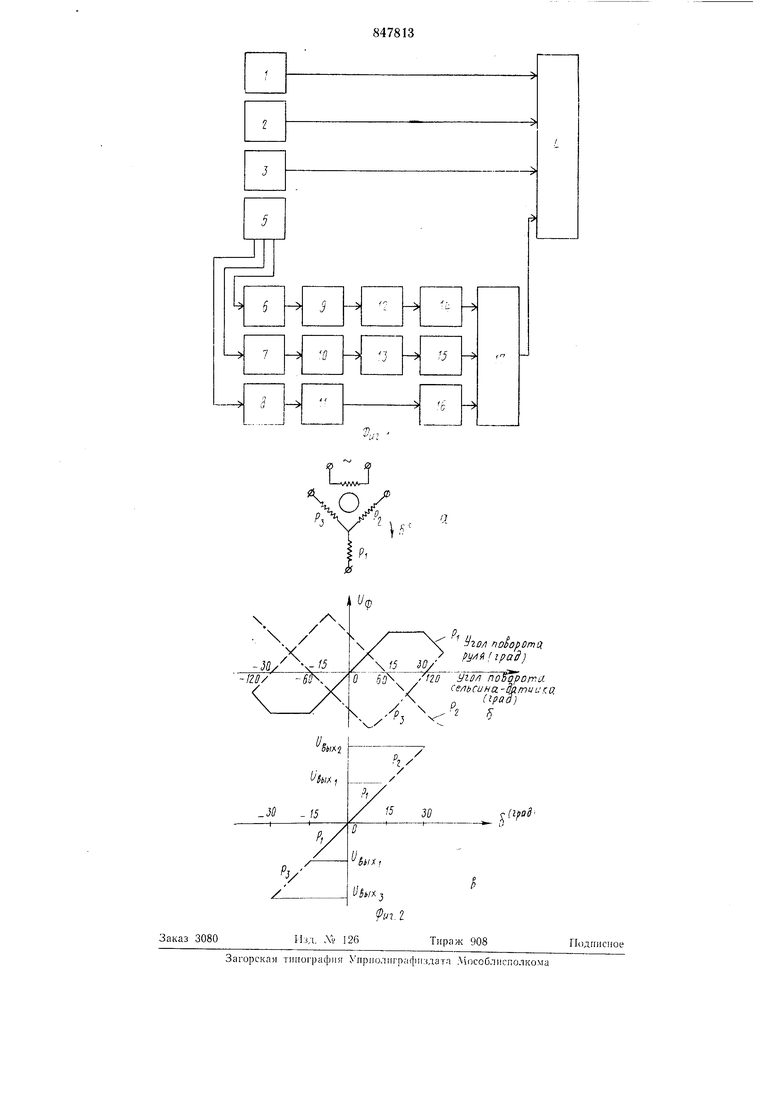
На фиг. 1 показаиа функциональпая схема предлагаемого авторулевого; па фиг. 2- графики, иллюстрирующие его работу.
Устройство содержит задатчик 1 курса, датчик 2 курса, датчик 3 скорости пзмеиепия курса, nepBbiii суммнруюпдий усилитель 4, сельсии-датчик 5 угла перекладки руля, три делителя 6-8 иапряжеиия, три фазочувствителыизьх выпрямителя 9-И, два одиостороииих ограипчителя 12 и 13, два инрертп)ующих усилите.ш 14 и 15, двустороиипй ограничитель 16, второй суммпруюии1т усилитель 17.
Пред.пожеииый авторулевой р;аботаст следующим образом.
Напряжение, ироиорпиоиальное углу перекладки руля в интервале --;30°, формируется в виде логической суммы трех напряжений, енимаемых с трех фаз сельсииа-д.:1Тчпка 5 угла перекладки руля (ф1и 2а);
прп перекладке руля в диапазоне 15 сигиал опимается е первой обмот1;( (Pj) сельсина-датчика 5;
при перекладке руля в диапазоие (--15°) - ( + 30°) к поетояиио.му и ограпичепиому (+15°) сигналу с первой обмотки сельсниадатчика 5 с помощью логпчеекой схемы добавляется епгиал е второй обмотки (Р) еельсипа-датчпка 5;
при перекладке руля в диаиазоне (-15°) - (-30°) к иостояипому и ограииеииому (-°15) сигна.1у с иерво) облиггкн ельсииа-датчика 5 с помоп1,ью .тогичеекой хемы добавляется сигпал с третьей обмоти (РЗ) сельсина-датчика 5.
На суммирующем усилителе 4 фо)м рутся сигпал:
1) при иерек.чадке руля 16°
о,.,:о л;-, ((,,,, + К-2 ((,„ + Кз f -f 6i ири 6i, 15°,
1Де фзод - задапиый куре еудиа; Тис. - истиииый курс судпа; ф - скорость измеиеиия ку|)са судиа;
б - угол перекладки ру.чя; , /CL), , /С - коэффициепты передачи. 2) при перекладке руля ( + 15°) - ( + 30°):
L/B.,x, + Л .Г
ири
3) прп иерекладке руля (--15°) -(-30)
и в к, и в:,1Х, + Ьз
прп -30° .
В предложенном устройстве это реализовано следующи.м образом (фиг. 26, в).
Пусть иа выходе первой обмотки еельсииа-датчика 5 при «улевом положении рулл иапряжеппе равио пулю. При увеличеиии сигнала угла иерекладки руля сигиал, спимаемый е первой обмотки сельсииа-датчика 5, поступает через третий делитель 8, иапряжепия, третий фазочувствительпый выпрямитель 11, двустороипий ограничитель 6, первый вход второго суммирующего усилителя 17 иа четвертый вход первого еумми)ующего усилителя 4.
С помощью трех делителей 6--8 иапряжеиия получаем искусствеппую нулевую точку между тремя выходами (обмоткам) иапряжеиия сельси 1а-датчика 5. Кроме того, с омощыо делителей 6-8 напряжеиия получаем аиряжеи1 е требуемой велич 1ы.
На выходе третьего фазочуветвительио -о выирямителя 11 получаем напряжение постояииого тока, полярность которО -о зав;|сит от фазы входного .
Двусторонний ограничитель 16 огранпчивает напряжеппе, соответству оп;ее стипного положения угла пе 5екладки руля (или -7-60° положе) угла поворота сельспиа-датчика 5). При этом с второй и третьей обмоток сельс па-датчика 5 не проходят а входдл второго еуммирующего уеилителя 17 благодаря первому од1 остороннему огра И1Ч 1телю 12 (ограничивает с.трицательпую поляр1 ость cnj-пала) и второму од осторо П1е.1у огран 1чптелю 13 (ограиичшвает ноложптельпу о полярность сигиала).
При увеличеи угла перекладкп ру.1Я более - 15° к ограиичепному е гHa;iy с иервсл обмотки се.и с 1па-датчика 5
добавляется сшнал с его BTOpofi обмоткт.
проходящий по цепи; второй делитель / напряжения, второй фазочувствптельпый выпрямитель 10, второй одпосторопний огранпчитель 13, второй ниверт 1рую1цпй усилитель 15 на второй вход второго суммирующего усплнтеля 17.
Сигнал, снимаемый со второй обмоткп сельснпа-датчика 5, будет пропорционалеп истинному положению угла перекладки )уля в диапазоне (+15°) - ( + 30°).
При сигиале угла иерекладки руля or О до -15° работает первая цепь: первая обмотка сельсниа-датчика 5, третий делитель 8 напряжения, третий фазочуветвлтелькьа выпрямитель 11, двусторонний ограиичитель 16, первый вход второго суммирующегр усилителя 17, четвертый вход первого суммируюпл,его усилителя 4.
При увеличении ciiriia a угла перекладки руля от -15° до -30° к ограиичениому сигналу с первой обмотки сельсина-датчика 5 добавляется сигнал с его третьей обмотки, ироходяи1,ий но цени: нервый делитель 6 наиряжеиня, иервый фазочувствительный выиря.митель 9, иервый одиостороииий ограиичитель 12, нервый иивертнруюиии усилитель 14, третий вход второго суммируюнгего уснлителя 17. Сигнал, снимаемый с третьей ()6. штатного се,1ьснна-датчика 5, будет пропорииоиален истинному ноложеиню угла иерекладки руля в днапазеие (-15°) - -Ж).
Таким образом, предлагаемый авторулевой позволит рулевому приводу судна работать более иадежно i точно, особенно при измеиеиии скорости хода судна, его загрузки и состояния моря.
Ф о р м у л а и 3 о б р е т е и и я
Авторулевой, содержащий сельсин-датчик угла иерекладки руля и иервый суммирующий усилитель, к пе)вому, второму и третьему входам которого иодключеиы соответственно задатчшх и датчик курса и датчик скорости нзмеиеиия курса, отличаюи; и и с я тем, что, с целью иовышеиия точиости и надежности авторулевого, он содержит второй суммирующий усилитель, последовательно соедииенные иервый делитель ианряжения, первый фазочувствительиЕзпЧ
выирямитель, первый одпосторонинй ограиичнтель и первый инвертирующий усилитель, последовательно соедииениые второй делитель напряжения, второй фазочувствнтельный выпрямитель, второй односторопНИИ ограиичнтель и второй инвертирующий усилитель, последовате.тыю соедииениые третий делитель напряжения, третий фазочувствительпый выирямитель и двусторонний ограиичнтель, причем входы делителей
иаиряжения соедниены с соответствующими выхода.ми сельсина-датчнка угла перекладки руля, выход, второго суммирующего усилителя подключеи к четвертому входу первого суммирующего усилителя, а иервый, второй и третий входы - к выходам соответственно первого н второго инвертирующих усилителей и двустороннего ограничителя.
Источинки информации, нринятые во внимание при экспертизе
1. Шлейер Г. Э. Управлепие подвижными надводными объектами автоматическое. - Эициклоиедия «Автоматизация производства и промышлеииая автоматика, т. 4, М., 1965, с. 161 - 162.
СССР
2. Авторское свпдетельство
.YO 460534, кл. G 05 D 1/00, 1973.
40 3. Авторское свидетельство СССР
до 553874, кл. G 05 D 1/00, 1975 (прототип).
ч
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ АВТОРУЛЕВОЙ «СИНИЦА» | 1966 |
|
SU179639A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОЛ1 СУДОВОГОРУЛЯ | 1967 |
|
SU206335A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
| Стабилизатор курса речных судов | 1974 |
|
SU525059A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Авторулевой | 1973 |
|
SU460535A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ | 1972 |
|
SU337300A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
i-
/ lr
5WX2 ,
h
Ъ
hoA nolofOmCf
j/-,
0 ,53 V2/ fM .a a.-8kmчura.
У
ce/thCUHo.
град
X Ax-j
F
