1 (обретение относится к транспорту, а . к (.-тройствам, регулирующим относа ,-е. л:ое расположение деталей в про- п..чсе перемещения по конвейеру, и может , п, испотьзовачо в различных отоаслях м мш ностроения
Я,ет- изобретения - расширение техчо- | кичег ич возможностей кантователя за ч ;ст обеспечения кантования только неправильно ориентированных деталей
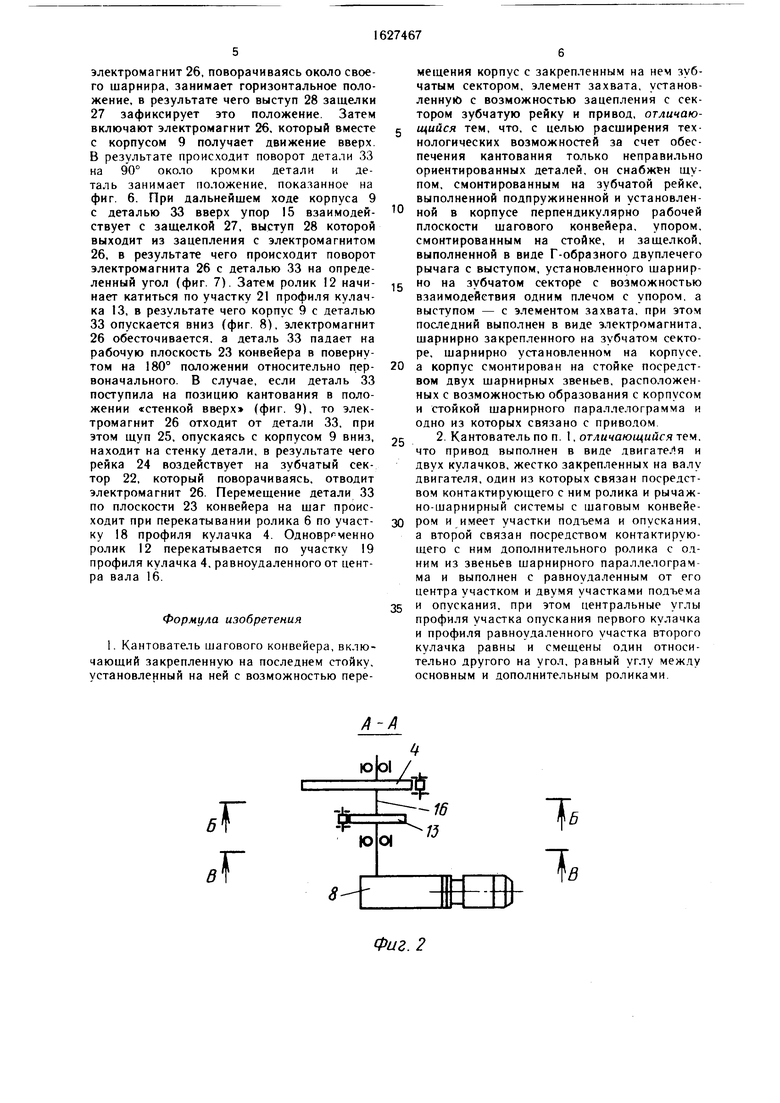
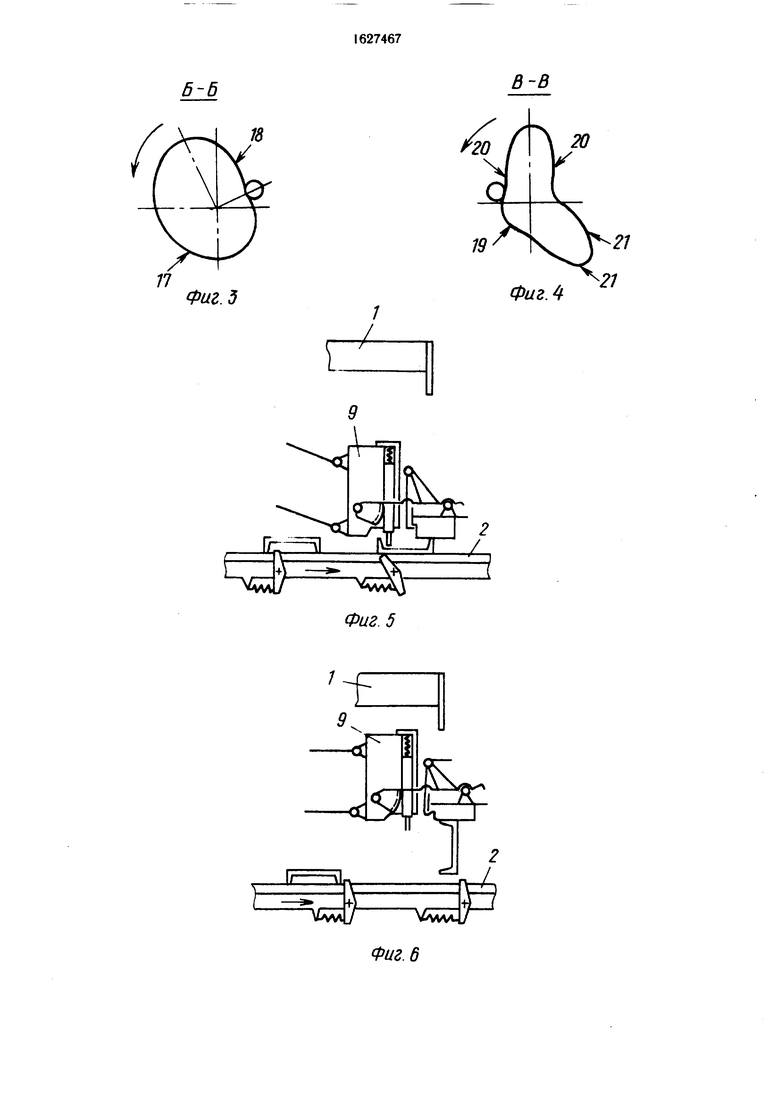
На фиг 1 изображен предлагаемый как i-оватечь. общий вид; на фиг 2 разрез Л Л на Фиг 1; па фиг. 3 - разрез Б -Б на Ф .| 2: на ргг А - разре В--В на фиг 2; на N:i ,фиг Н -- последовательность
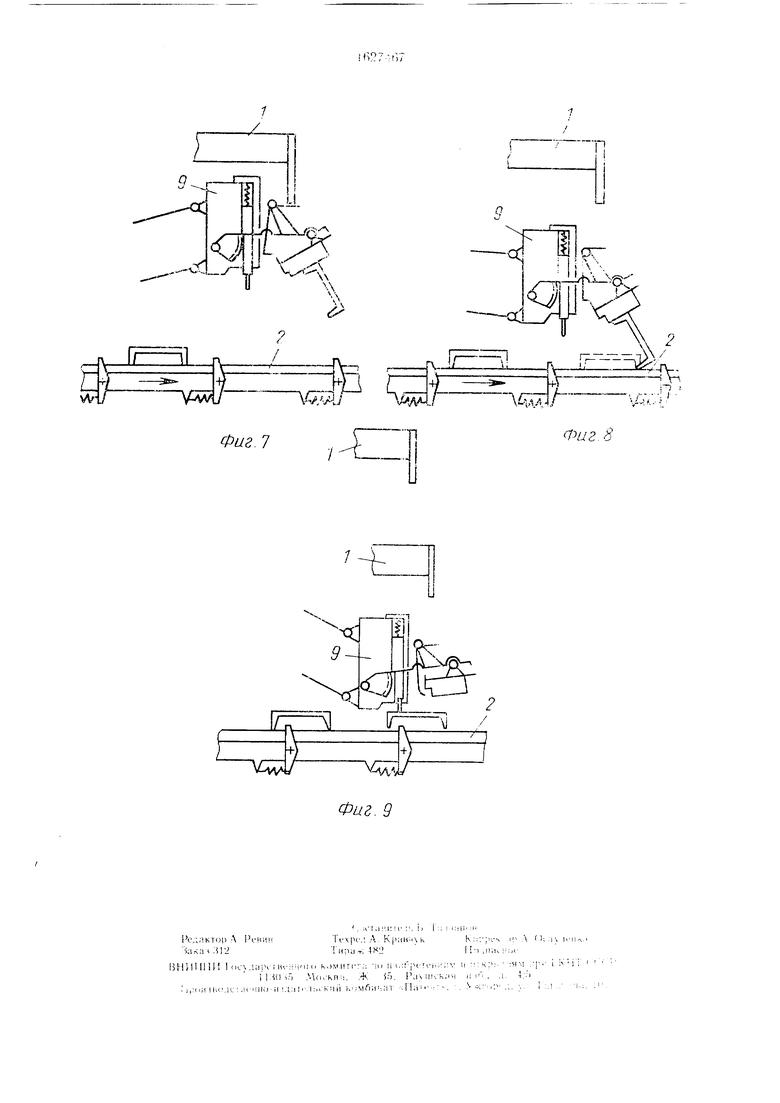
к «а ) детали; на фиг 9 - отвод этек- its M;UH: T;I г -, ,. рпгположенной т а кон НОИСРС ,1 r-.-.eOvoM i положении
Кинтова ге п, содержит стойку 1. закреп- ;еп:г (i на раме 2 шагового конвейера, ме:ощего штангу 3. перемещаемую через к лачок 4. рычажно-шарнирную систему 5 и ролик 6 о привода 7 с двигателем 8. . .- им I счонтирозан корпус 9 посредст- )-и прямого Ю и Г-образного 11 шарнирных звеньев, образующих с корпусом 9 и со п. парнирнын параллелограмм Звени Ч мере1, ролик 12 связано с купачком 13 мр. воча 7 Звено 10 связано со стойкой пружиной 14, которая обеспечивает контакт ролика 12с профильной поверхностью КУЛЗЧ- ка 13 , стоике смонтирован упор 15 Кулачки 4 i; 13 жестко закреплены н b..i 16 двигателя 8. Профиль ;;у.Чйика 4 имеет участок 17 подъема и участок 18 опус- кччня Профиль ч тачка 13 имеет равно- удаденчый от центра вала участок 19 и два -, час1ла, состоящие из участка 20 подъема и часика 21 опускания. Центральные углы профиля участка 18 опускания кулачка 4 и провидя равноудаленного участка 19 кулачка 13 равны и смещены относительно др г друга на угол, равный у:лу между роликами 6 и 12
с,
0
ь
5
0
5
На корпусе 9 шарнирно закреплен i -бчатый секгоп 22 и установлена перпендикулярно рабочей плоскости 23 конвейера губчатая рейка 24 с возможностью взаимодействия с зубчатым сектором 22 Зубча- ая рейка 24 подпружинена относительно кпр гу-а Q и снабжена щупом 25
На зубчатом секторе 22 шарьирно за- K-)(iii ны электромагнит 26 п защелка 27, выполненная в виде Г-образного двуплечего рычага, одно плечо которого снабжено выступом 28 для взаимодействия с электромагнитом 26. а другое плечо выполнено с во (УОЖИОСГЫО к .аимоде-иствия с пором 15
На штанге .3 конвейера укреплены тол- катети 29 с возможностью поворота в одну cropoi v в вертикальной плоскости относительно осей 30 н удерживаются в вертикальном положении пружинами 31 и упорами 32 Толкатели 29 перемещают деталь 33 по плоскости 23.
Кантователь работает следующим образом.
При - ключепии двнгател 8 привода 7 через вал 16 сообщает вращательное дзи- жение кулачкам 4 и 13. Ролик 6, перекатываясь по участку 17 профиля кулачка 4, сообщает поступательное движение штанге 3 через рычажно-шарнирную систему 5 При этом толкатели 29 при взаимодействии с четалью 33. поворачиваясь относительно оси 30, утопают за плоскость 23 конвейера. Толкатели 29 при выходе из контакта с деталью 33 поворачиваются под, действием пружины 31 до Упора 32 и принимают вертикальное положение.
Одновременно с роликом 6 ролик 12, перекатываясь по участку 20 профиля кулачка 13, воздействует на Г-образное звено 11, которое сообщает вижение вниз корпусу 9 до контакта электромагнита 26 с деталью 33 (фиг 5). Если на позицию кантования проступила деталь открытой стороной вверх например, швеллер «стенкой г,низ-), то
электромагнит 26, поворачиваясь около своего шарнира, занимает горизонтальное положение, в результате чего выступ 28 защелки 27 зафиксирует это положение. Затем включают электромагнит 26, который вместе с корпусом 9 получает движение вверх. В результате происходит поворот детали 33 на 90° около кромки детали и деталь занимает положение, показанное на фиг. 6. При дальнейшем ходе корпуса 9 с деталью 33 вверх упор 15 взаимодействует с защелкой 27, выступ 28 которой выходит из зацепления с электромагнитом 26, в результате чего происходит поворот электромагнита 26 с деталью 33 на определенный угол (фиг. 7). Затем ролик 12 начинает катиться по участку 21 профиля кулачка 13, в результате чего корпус 9 с деталью 33 опускается вниз (фиг. 8), электромагнит 26 обесточивается, а деталь 33 падает на рабочую плоскость 23 конвейера в повернутом на 180° положении относительно первоначального. В случае, если деталь 33 поступила на позицию кантования в положении «стенкой вверх (фиг. 9), то электромагнит 26 отходит от детали 33. при этом щуп 25, опускаясь с корпусом 9 вниз, находит на стенку детали, в результате чего рейка 24 воздействует на зубчатый сектор 22, который поворачиваясь, отводит электромагнит 26. Перемещение детали 33 по плоскости 23 конвейера на шаг происходит при перекатывании ролика 6 по участку 18 профиля кулачка 4. Одновременно ролик 12 перекатывается по участку 19 профиля кулачка 4, равноудаленного от центра вала 16.
Формула изобретения
1. Кантователь шагового конвейера, включающий закрепленную на последнем стойку, установленный на ней с возможностью перемещения корпус с закрепленным на нем зубчатым сектором, элемент захвата, установленную с возможностью зацепления с сектором зубчатую рейку и привод, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения кантования только неправильно ориентированных деталей, он снабжен щупом, смонтированным на зубчатой рейке, выполненной подпружиненной и установлен0 ной в корпусе перпендикулярно рабочей плоскости шагового конвейера, упором, смонтированным на стойке, и защелкой, выполненной в виде Г-образного двуплечего рычага с выступом, установленного шарнир5 но на зубчатом секторе с возможностью взаимодействия одним плечом с упором, а выступом - с элементом захвата, при этом последний выполнен в виде электромагнита, шарнирно закрепленного на зубчатом секторе, шарнирно установленном на корпусе.
0 а корпус смонтирован на стойке посредством двух шарнирных звеньев, расположенных с возможностью образования с корпусом и стойкой шарнирного параллелограмма и одно из которых связано с приводом.
2. Кантователь по п. 1, отличающийся тем. что привод выполнен в виде двигателя и двух кулачков, жестко закрепленных на валу двигателя, один из которых связан посредством контактирующего с ним ролика и рычаж- но-шарнирный системы с шаговым конвейе0 ром и имеет участки подъема и опускания, а второй связан посредством контактирующего с ним дополнительного ролика с одним из звеньев шарнирного параллелограмма и выполнен с равноудаленным от его центра участком и двумя участками подъема и опускания, при этом центральные углы профиля участка опускания первого кулачка и профиля равноудаленного участка второго кулачка равны и смещены один относительно другого на угол, равный углу между основным и дополнительным роликами.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| Устройство для укладки в пакет металлических чушек | 1983 |
|
SU1162715A1 |
| Ротор для сверления отверстий | 1988 |
|
SU1668103A1 |
| Кантователь деталей в автоматических линиях с шаговым конвейером | 1980 |
|
SU918210A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Автомат для контроля линейных параметров дисков фрикционов | 1975 |
|
SU766670A1 |
| Шаговый конвейер | 1989 |
|
SU1646957A1 |
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
| Установка для пневматического транспортирования грузов в контейнерах или контейнерных составах | 1972 |
|
SU495251A1 |
| Кантователь | 1987 |
|
SU1496975A1 |
Изобретение относится к трачп рт ч почвотяет расширить технотог;ше и ь( ( мохности за счет обеспечения ча т ни ы топько неправильно ориентировачнмч и т те Кантователь включает акреп-енн ) и раме 2 шагового конвейета cтoй I . т новтенным на ней с ю г еге меыеннч (Ki 9 На m -4T.tv иарнирно закреплен з бчатый сектор (С) 22 на котором шарнирно закреп 1ены э ieveHT захвата в виде электромагнита (ЭМ) 26 тля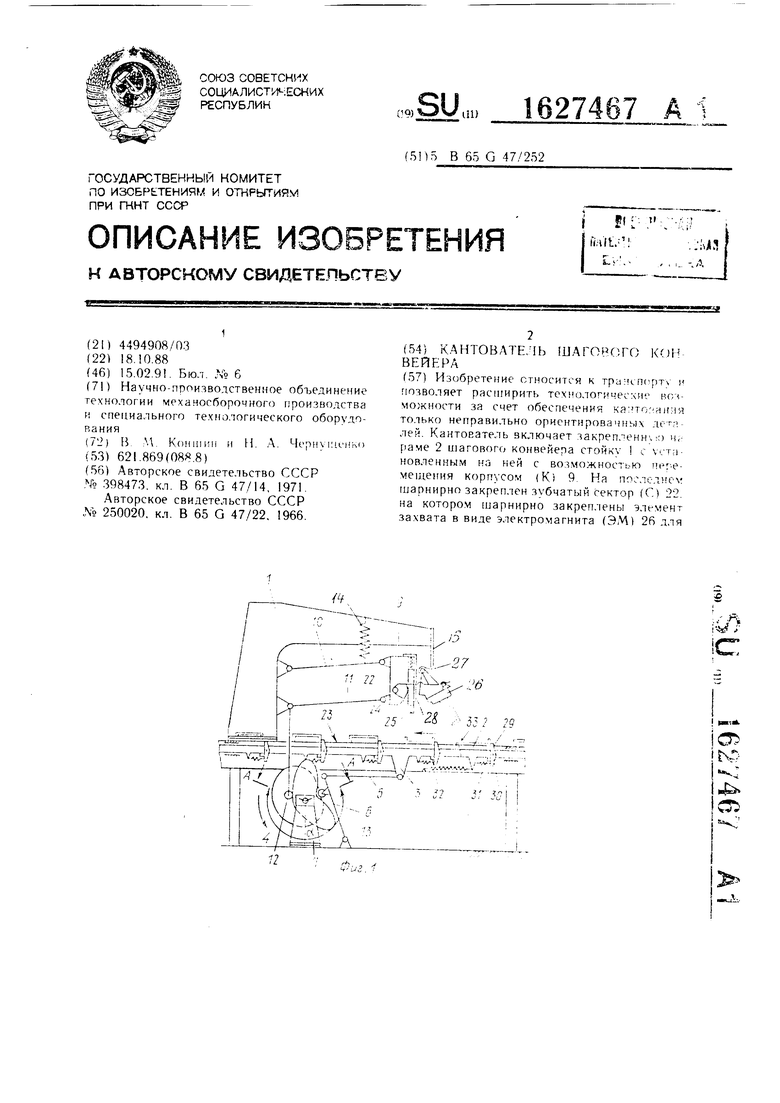
Г
вч
/
16
7J
5
ЧВ
Фиг. 2
6-6
13
17
Фиг.д
Ггг- AlML-ГТГ /
0.5
в-в
20
19
Фиг А
о/ 4J
L
0/72.5
Р1 i
M i )d I
I( I) I I M;
/
Г I i v 1Ч
iini1(| (1014,
| 0 |
|
SU398473A1 |
