.,(46) 07.10.92. Бюл. № 37 J(21) 4039432/27 (22) 20.03.86
(71)Центральное проектно-конструкторское бюро кузнечно-прессового машиностроения
(72)Ю. М. Коробейников и Ю. А. Максимов
(53)621.778.2.06-52:672.621(088.8) (56) Авторское свидетельство СССР № 1249772, кл. В 21 L 1/04, 1984.
(54)ЦЕПЕВЯЗАЛЬНЫЙ АВТОМАТ С КАНТОВАТЕЛЕМ ВЕРТИКАЛЬНОГО ИСПОЛНЕНИЯ
(57) Изобретение касается обработки металлов давлением,.в частности устройствам для изготовления цепей. Цель изобретения - повышение надежности. Цепевязальный
автомат состоит из установленных на станине механизмов, связанных общим приводом, и кантователя вертикального исполнения, выполненного в виде установленного в корпусе подвижного ползуна 62 со стержнем 66. В ползуне 62 выполнен паз 63, в котором размещено плечо 64 рычага 65, связанного гибкой тягой 67 с рычагом 68, контактирующим с кулачком 70, кинемати-. чески связанным с общим приводом автомата. Кантование обжатого звена из горизонтального в вертикальное положение производится за счет введения стержня 66 Kakto- вателя внутрь заготовки. Порядок кантования определяется формой кулачка 70. 4 ил. ,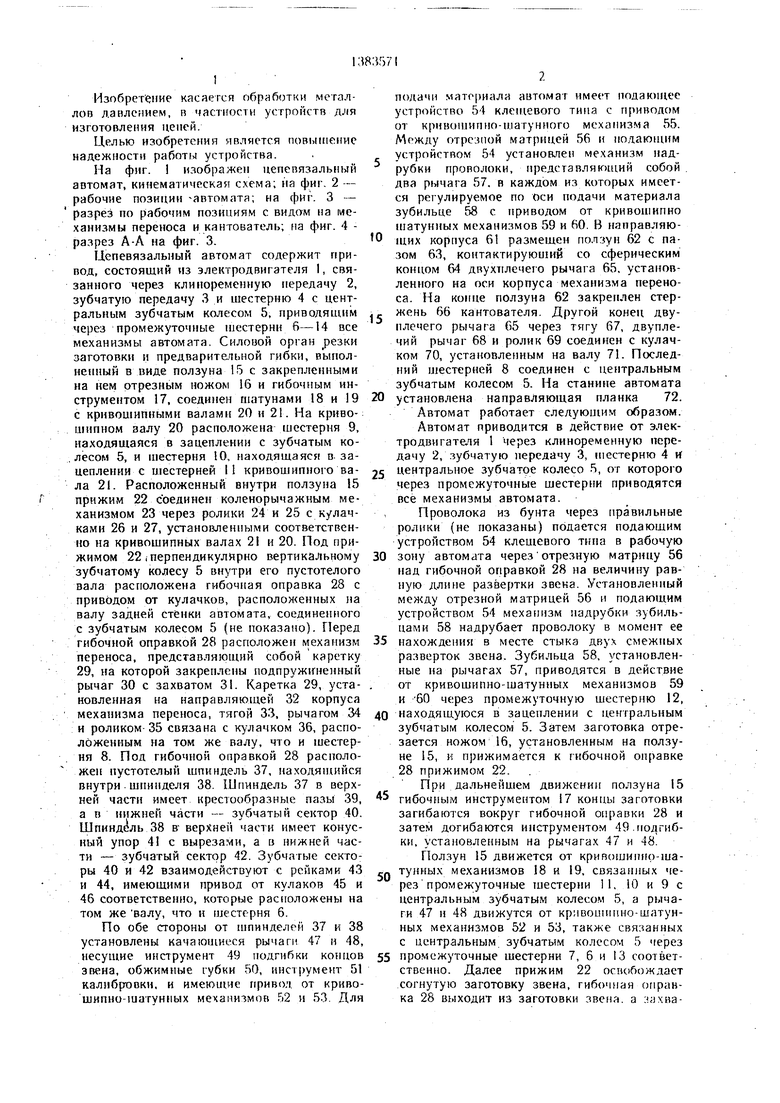
| название | год | авторы | номер документа |
|---|---|---|---|
| Цепевязальный автомат | 1984 |
|
SU1249772A1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| Цепевязальный автомат | 1979 |
|
SU1022396A1 |
| Автомат цепевязальный | 1980 |
|
SU925512A1 |
| Автомат цепевязальный | 1983 |
|
SU1162548A2 |
| Гибочный автомат с приводом от центральной шестерни | 1986 |
|
SU1433543A1 |
| Автомат для изготовления изделий из проволоки | 1977 |
|
SU737080A1 |
| Устройство для изготовления проволочных разводных шплинтов | 1988 |
|
SU1563818A1 |
| Цепевязальный автомат | 1957 |
|
SU111976A1 |
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
юЛ
ОС
ОС
со
01
-N4
Изобретение касается обработки металлов ланлемием, в частности устройств для изготовления цепей.
Целью изобретения является повышение надежности работы устройства.
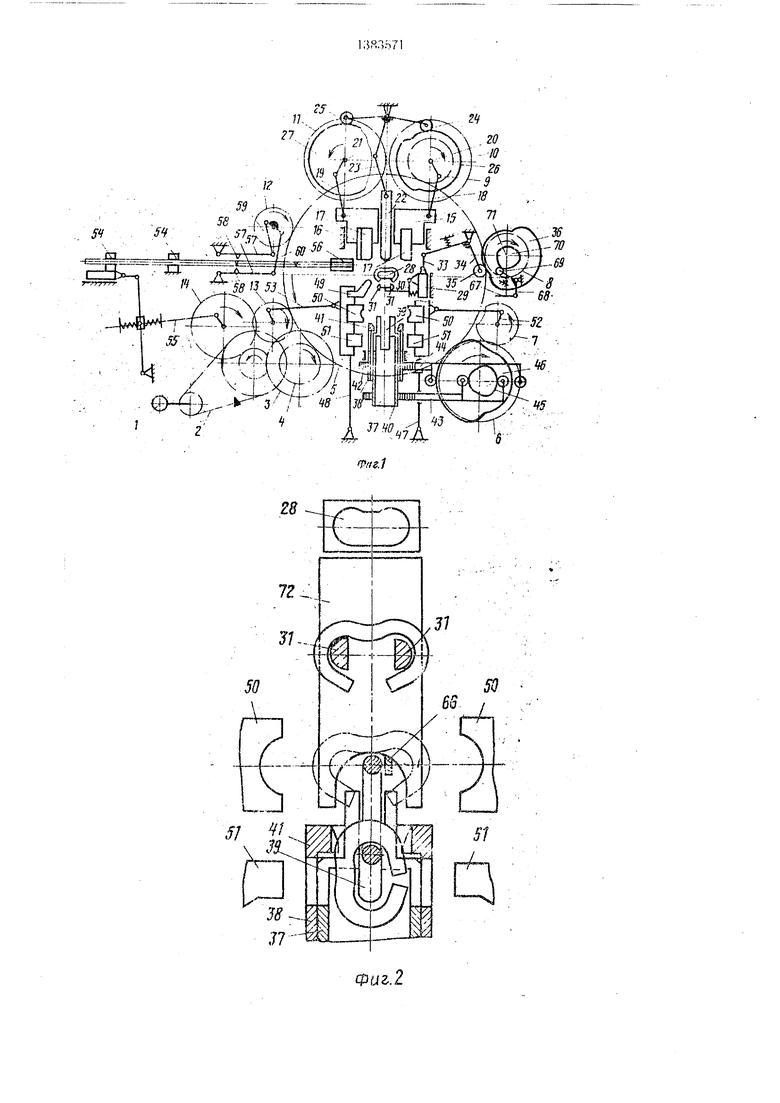
На фиг. 1 изображен цепевязальный автомат, кинематическая с.хема; на фиг. 2 - рабочие позиции автомата; на фиг. 3 - разрез по рабочим позициям с видом на механизмы переноса и кантователь; на фиг. 4 - разрез А-А на фиг. 3.10
Цепевязальный автомат содержит привод, состоящий VI3 электродвигателя 1, связанного через клиноременную передачу 2, зубчатую передачу 3 и шестерню 4 с центральным зубчатым колесом 5, приводящим | через промежуточные шестерни 6-14 все механизмы автомата. Силовой орган резки заготовки и предварительной гибки, вынол- иепный в виде ползуна 15 с закрепленными на нем отрезным ножом 16 и гибочным инструментом 17, соединен шатунами 18 и 19 20 с кривошипными валами 20 и 21. На криво-; шипном валу 20 расположена шестерня 9, находящаяся в зацеплении с зубчатым ко- лесом 5, и шестерня 10, находящаяся в. зацеплении с щестерней II кривошипного ва- 55 ла 21. Расположенный внутри ползуна 15 прижим 22 соединен коленорычажным механизмом 23 через ролики 24 и 25 с кулачками 26 и 27, установленными соответственно на кривошипных валах 21 и 20. Под прижимом 22(Перпендикулярно вертикальному 30 зубчатому колесу 5 внутри его пустотелого вала расположена гибочная оправка 28 с приводом от кулачков, располон енных на валу задней стенки автомата, соединенного с зубчатым колесом 5 (не показано). Перед гибочной оправкой 28 расположен механизм 35 переноса, представляющий собой каретку 29, на которой закреплены подпружиненный рычаг 30 с захватом 31. Каретка 29, уста- . новленная на направляющей 32 корпуса механизма переноса, тягой 33, рычагом 34 дО и роликом 35 связана с кулачком 36, расположенным на том же валу, что и шестер- ня 8. Под гибочной оправкой 28 расположен пустотелый шпиндель 37, иаходяп|ийся внутри. шпинделя 38. Шпиндель 37 в верхней части имеет крестообразные пазы 39, 5 а н нижней части - зубчатый сектор 40. Шпиндель 38 к верхней части имеет конусный упор 4 с вырезами, а и нижней части - зубчатый сектор 42. Зубчатые секторы 40 и 42 взаимодействуют с ройками 43 п и 44, имеющими привод от кулаков 45 и 46 соответственно, которые расположены на том же валу, что и шестг-рня 6.
По обе стороны от шпинделей 37 и 38 установлены качаюншеся рычаги 47 и 48, несущие инструмент 49 подгибки концов 55 звена, обжимные губки 50, инструмент 51 калибртэвки, и имеюи1ие привод от криво- шипно-щатуниых механизмов 52 и 53. Для
2
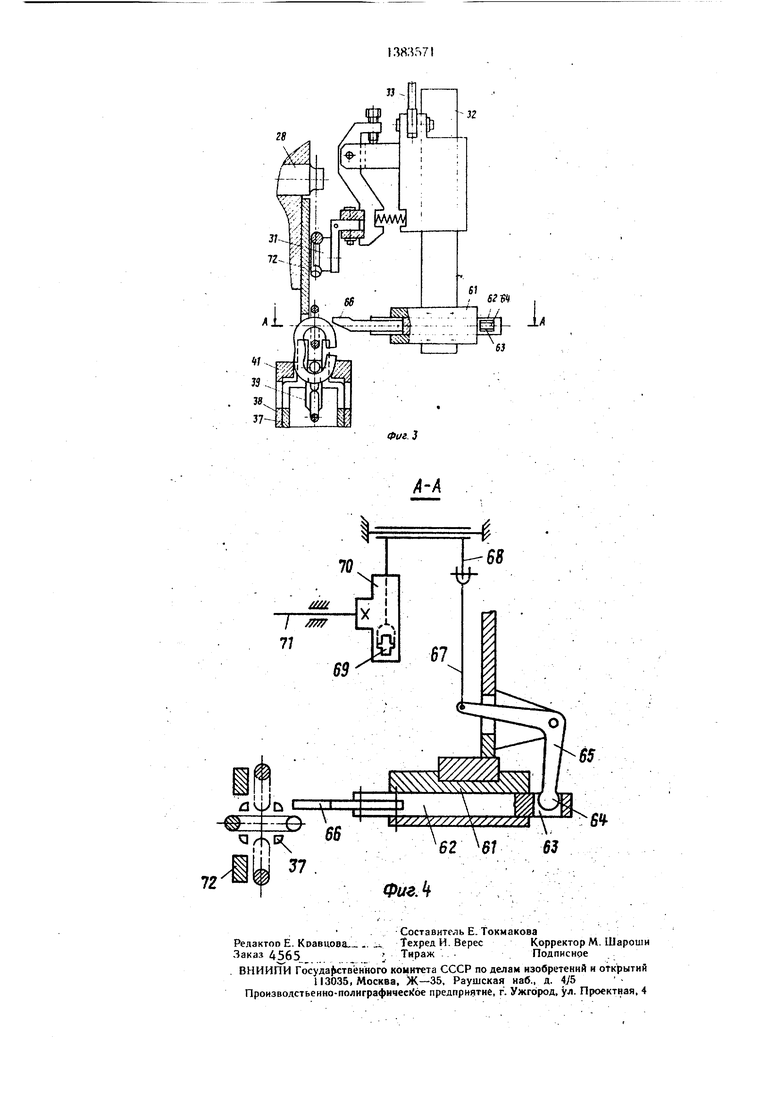
подачн маториала автомат имеет подаюн1ее устройство 54 клеи1евого тина с приводом от кривошипно-шатунного механизма 55. Между отрезной матрицей 56 и подающим устройством 54 установлен механизм надрубки проволоки, представляющий собой два рычага 57. в каждом из которых имеется регулируемое по оси подачи материала зубильце 58 с приводом от кривошипно шатунных механизмов 59 и 60. В направляющих корпуса 61 размещен ползун 62 с пазом 63, контактирующий со сферическим концом 64 двухилечего рычага 65. установленного на оси корпуса механизма переноса. На конце ползуна 62 закреплен стержень 66 кантователя. Другой конец двуплечего рычага 65 через тягу 67, двуплечий рычаг 68 и ролик 69 соединен с кулачком 70, установленным на валу 71. Последний щестерней 8 соединен с центральным зубчатым колесом 5. На станине автомата установлена направляющая планка 72.
Автомат работает следующим образом.
Автомат приводится в действие от элек- тродБигатетя 1 через клиноременную передачу 2, .зубчатую передачу 3, шестерню 4 и центральное зубчатое колесо 5, от которого через промежуточные шестерни приводятся все механизмы автомата.
Проволока из бунта через правильные ролики (не показаны) подается подающим устройством 54 клещевого типа в рабочую зону автомата через отрезную матрицу 56 над гибочной оправкой 28 на величину равную длине развертки звена. Установленный между отрезной матрицей 56 и подающим устройством 54 механизм надрубки зубиль- цами 58 надрубает проволоку в момент ее нахождения в месте стыка двух смежных разверток звена. Зубильца 58, установленные иа рычагах 57, приводятся в действие от кривощипно-шатунных механизмов 59 и 60 через промежуточную шестерню 12, находящуюся в зацеплении с центральным зубчатым колесом 5. Затем заготовка отрезается ножом 16, установленным на ползуне 15, к прижимается к гибочной оправке 28 прижимом 22. .
При дальнейшем движении ползуна 15 гибочным инструментом 17 концы заготовки загибаются вокруг гибочной оправки 28 и затем догибаются инструментом 49.г1о.агиб- ки, установленным на рычагах 47 и 48
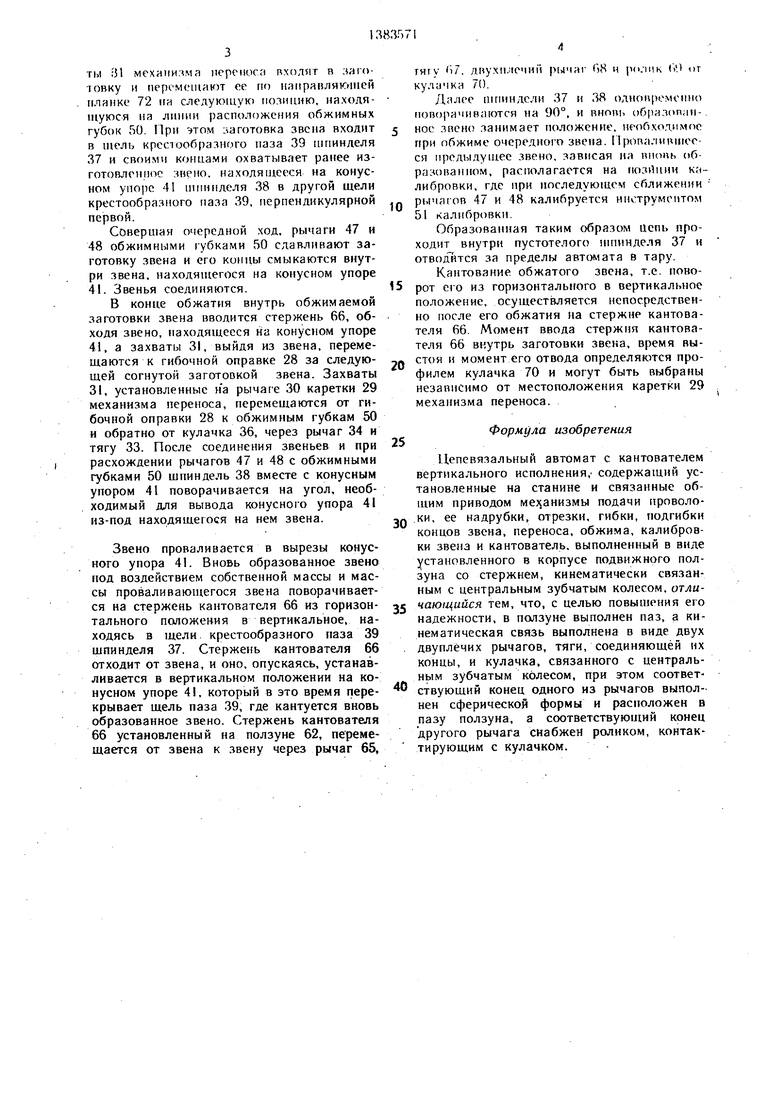
Ползун 15 движется от кривошипнр-ша- тунных механизмов 18 и 19, связанных через промежуточные шестерни 11, 10 и 9 с центральным зубчатым колесом 5, а рычаги 47 и 48 движутся от кривоиппшо-шатунных механизмов 52 и 53, также связанных с центральным зубчатым колесом 5 через промежуточные шестерни 7, 6 и 13 соответственно. Далее прижим 22 освобождает согнутую заготовку звена, гибочная оправка 28 выходит из заготовки звена, а ахваты it мсхапи.чма псрепос.ч пхолят в .чаго- говку и переметают ее по направляющей плянке 72 ita слелукхцую позицию, находя- щуюся на линии расположения обжимных губок 50. При этом liaroTOBKa звена входит в щель крсслообразного паза 39 шпинделя 37 и своими концами охватывает ранее изготовленное звено, нахолянхееся на конусном упоре 41 111пиЕ1леля 38 в другой щели крестообразного паза 39, перпендикулярной первой.
Совершая очередной ход, рычаги 47 и 48 обжимными губками 50 сдавливают заготовку звена и его концы смыкаются внутри звена, находящегося на конусном упоре 41. Звенья соединяются.
В конце обжатия внутрь обжимаемой заготовки звена вводится стержень 66, обходя звено, находящееся на конусном упоре 41, а захваты 31, выйдя из звена, перемещаются к гибочной оправке 28 за следую- щей согнутой заготовкой звена. Захваты 31, установленные н а рычаге 30 каретки 29 механизма переноса, перемещаются от гибочной оправки 28 к обжимным губкам 50 и обратно от кулачка 36, через рычаг 34 и тягу 33. После соединения звеньев и при расхождении рычагов 47 и 48 с обжимными губками 50 щпиндель 38 вместе с конусным упором 41 поворачивается на угол, необходимый для вывода конусного упора 41
из-под находящегося на нем звена.
Звено проваливается в вырезы конусного упора 41. Вновь образованное звено под воздействием собственной массы и массы проваливающегося звена поворачивается на стержень кантователя 66 из горизон- тального положения в вертикальное, находясь Б щели крестообразного паза 39 щпинделя 37. Стержень кантователя 66 отходит от звена, и оно, опускаясь, устанавливается в вертикальном положении на конусном упоре 41, который в это время пере- крывает щель паза 39, где кантуется вновь образованное звено. Стержень кантователя 66 установленный на ползуне 62, перемещается от звена к звену через рычаг 65,
5
- 5
0
е
тягу i7. лпухплрчий рычаг 08 ц ро.шк dO от кулачки 70.
Лгысе шпиндели 37 и 38 олно11 емс1|но поворачиваются на 90°, и внощ, обрязопан- ное ЗЕ)ено занимает положение, пеобхо.чимпе при обжиме очередно1Ч ) звена. Проплливпюс- ся предыдущее звено, зависая н.ч ппопь об- разпваниом, располагается на гюзйиии либровки, где при последующем сближении рычагов 47 и 48 калибруется инструментом 51 калибровки.
Образованная таким образом цепь проходит внутри пустотелого шпинделя 37 и отводится за пределы автомата в тару.
Кантование обжатого звена, т.е. поворот его из горизонтального в вертикальное положение, осуществляется непосредственно после его обжатия на стержне кантователя 66. Момент ввода стержня кантователя 66 внутрь заготовки звена, время вы- стоя и момент его отвода определяются профилем кулачка 70 и могут быть выбраны независимо от местоположения каретки 29 механизма переноса.
Формула изобретения
Цепевязальный автомат с кантователем вертикального исполнения, содержащий установленные на станине и связанные общим приводом ме анизмы подачи проволоки, ее надрубки, отрезки, гибки, подгибки концов звена, переноса, обжима, калибровки звена и кантователь, выполненный в виде установленного в корпусе подвижного ползуна со стержнем, кинематически связанным с центральным зубчатым колесом, отличающийся тем, что, с целью повышения его надежности, в ползуне выполнен паз, а кинематическая связь выполнена в виде двух двуплечих рычагов, тяги, соединяющей их концы, и кулачка, связанного с централь- нь1м зубчатым колесом, при этом соответствующий конец одного нз рычагов выполнен сферической формы и расположен в пазу ползуна, а соответствующий конец другого рычага снабжен роликом, контактирующим с кулачком.Я
28
24
-
Т ч К -.- .
fO
50
Фиг.2
28
.12
1/
6J
