может начать воз,В|рат в исходное положение до тех пор, пока кулачки штанги не выведут опоку из зоны люльки (в противном случае подпружиненные рычаги люльки, съезжая со стационарных копиров, дадут возможность несущим рычагам повернуться в исходное положение, и посл.ед.ние начнут увлекать опоку назад). Это снижает производительность кантователя.
Цель изобретения - увеличение производительности кантователя.
Для этого на противоположных концах каждого вала жестко посан ены кулачки, корпус кантователя cнaiбжeн утапливающимися в направлении кантовки верхним и нижним упорами, а на боковых поверхностях основания люльки щарнирно смонтированы подпружиненные рычаги, несущие взаимодействующие с упомянутыми кулачками собачки и контактирующие с утапливающимися упорами.
Такое конструктивное рещение позволяет возвращать люльку кантователя в исходное положение сразу же после завершения рабочего хода, не ожидая пока транспортный орган заберет сориентированную опоку из зоны люльки, т. е. позволяет увеличить производительность кантователя.
На фиг. 1 изображен предлагаемый кантователь, план; на фиг. 2 - разрез по А-А на фиг. 1 (тонкими линиями показаны опока, подъемная секция рольтанга, осуществляющая подачу Опоки в люльку кантователя, и транспортный орган, например щтанговый конвейер, осуществляющий подачу сориентированных опок к формовочной мащине, щтрихпунктирными линиями показаны промежуточное и крайнее положение люльки и опоки; на фиг. 3-вид по стрелке Б на фнт. 2; на фиг. 4- узел I на фиг. 2; на фиг. 5 - узел II на фиг. 2; на фиг. 6 - люлька кантователя, фронтальная проекция; на фиг. 7 - то же, план; на фиг. 8- разрез по В-В на фиг. 6; на фит. 9 - разрез по Г-Г на фиг. 6;, на фиг. 10 - разрез по Д-Д на фиг. 6; на фнт. 11 - разрез по Е-Е на фиг. 7; на фиг. 12 - разрез по Ж-Ж на фиг. 7; на фиг. 13 - вид по стрелке И на фиг. 7; на фиг. 14 - вид по стрелке К на фиг. 1; на фиг. 15 - вид по стрелке Л на фи1Г. 1; на фиг. 16-разрез по М-М на фиг. 15; на фиг. 17 - разрез по Н-Н на фиг. 15; на фиг. 18 - разрез по П-П на фиг. 16.
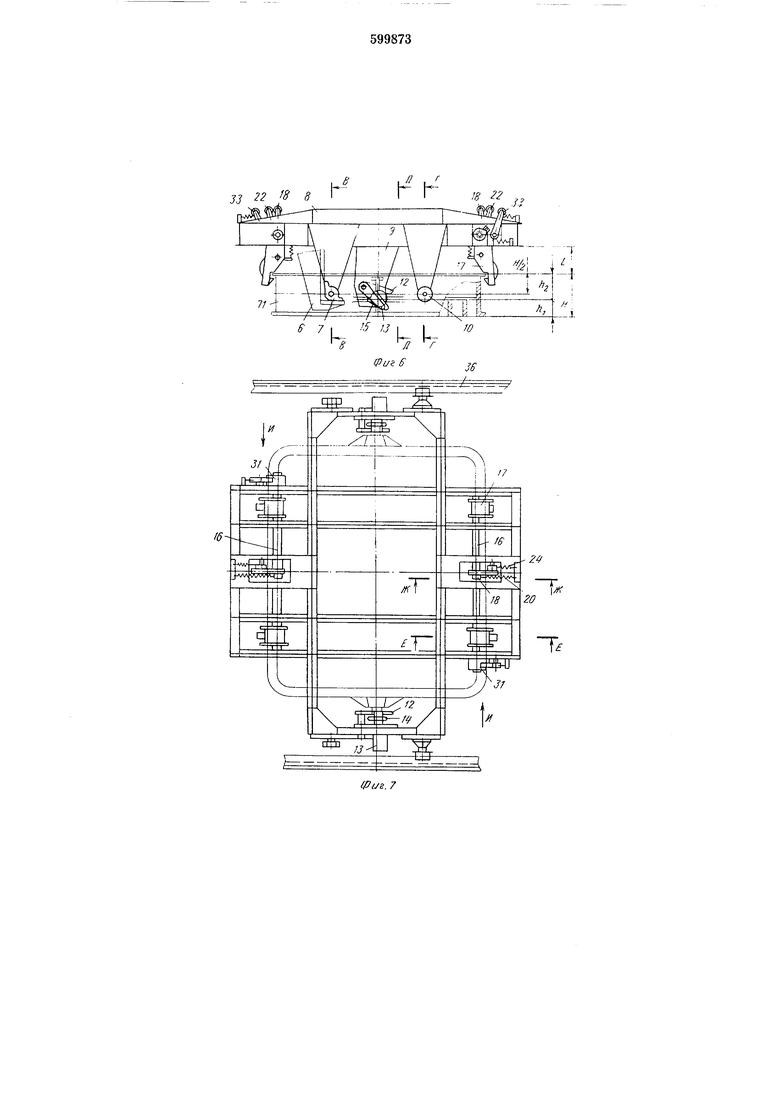
Кантователь содержит раму 1, боковые щвеллеры которой служат направляющими для катков 2 тележки 3, соединенной через кронштейн 4 со штоком силового цилиндра 5, смонтированного на раме 1. Тележка 3 с обеих сторон снабжена кронштейнами 6, на которых установлены подщипники 7 люльки 8. Люлька 8 смонтирована в подшипниках 7 с возможностью свободного вращения в вертикальной плоскости, причем ось вращения люльки смещена влево от ее центра тяжести, что вызывает -постоянное стремление люльки опрокинуться вниз под действием собственного веса. Люлька 8 снабжена боковыми
направляющими 9 (см. фиг. 10) и сидящим на подшипниках качения опорными катками 10, причем последние смещены вправо от центра тяжести люльки. В боковых направляющих 9 свободно смонтирована ось 11 (см. фиг. 10), жестко соединенная €0 щупом 12 и флажком 13. Угол свободного поворота оси И ограничен упорами 14 и 15.
В основании люльки 8 с возможностью свободного вращения в вертикальной плоскости смонтированы валы 16 (см. фиг. 11), на каждый из которых жестко посажены два несущих рычага 17 и рычаг 18 (см. фиг. 12), имеющий диск-полузамок 19. Рычаг 18 прул :иной
20 соединен с основанием люльки 8, свободно несущим на себе ось 21, на которой жестко посажен рычаг 22, имеющий диск-полузамок 23. Рычаги 22 пружинами 24 связаны с основанием люльки 8. Каждый из рычагов 18 и 22
снабжен роликами 25, имеющими возможность свободного вращения. Каждый из несущих рычагов 17 снабжен опорным платиком 26 (см. фиг. И) и осью 27, на которой свободно посажен захват 28, соединенный пружиной 29 с несущим рычагом 17. Под действием прул-;ин 29 захваты 28 постоянно прижимаются к опорным платикам 26 несущих рычагов 17. Расстояние / между опорной плоскостью платика 26 и опорной плоскостью захвата 28 несколько больше, чем толщина фланца опоки (см. фиг. И). Расстояние L между опорной плоскостью платиков 26 и нижней плоскостью основания люльки 8 (см. фиг. 6) выполнено таким, чтобы рама транспортного устройства, например штангового конвейера, не цепляла люльку, когда последняя находится в перевернутом положении (см. фиг. 3, 4, 6). Расстояние по вертикали от опорной плоскости платиков 26 до осей подшипников 7 и опорных катков 10 равно половине высоты опоки Я/2 (см. фиг. 6).
Пружина 20 (см. фиг. 12) через рычаг 18 и вал 16 постоянно стремится прижать несущие рычаги 17 к упорам 30 основания люльки 8
(см. фиг. 11). Диски-полузамки 19 и 23, имея соответствующие вырезы, в паре образуют замок (см. фиг. 12), который не позволяет валу
16совместно с несущими рычагами 17 повернуться в направлении, обратном действию
пружины 20, когда часть диска-полузамка 23 заходит в вырез диска-полузамка 19. Рычаги
17заперты до тех пор, пока рычаг 22 не повернет диск-полузамок 23 таким образом, что его вырез займет нейтральное положение по
отношению к диску-полузамку 19.
Щупы 12 с флажком 13 под действием собственного веса опираются на упоры 15 (см. фиг. 10). Па каждом из валов 16 люльки 8 по диагонали жестко посажены кулачки 31,
взаимодействующие с собачками 32 рычагов 33 (см. фиг. 7 и 13). Рычаги 33 смонтированы по бокам основания люльки 8 щарнирно и соединены с ним пружинами 34. Пружины 34 через рычаги 33 постоянно стремятся прижать
собачки 32 к кулачкам 31.
Люлька 8 своими опорными катками 10 опирается па направляющее устройство, смонтированное на раме 1 кантователя по обе стороны люльки 8 симметрично ее оси. Направляющие устройство состоит из боковин 35, ко-. торые снабжены неподвижными направляющими 36-39 (см. фиг. 14), стрелками 40-43, имеющими возможность свободного вращения в вертикальной плоскости, собачками 44 и 45 и двуплечим рычагом 46, которые также имеют возможность свободного вращения в вертикальной ПЛОСКОСТИ на своих полуосях. Кроме того, боковины 35 снабжены упором 47 и направляющей 48 для тяг 49 и 50, которые пальцами 51 и 52 соединены -с хвостовиками собачек 44 и 45.
Стрелки 40 и 41 снабжены кулачками 53 и 54 и под действием собственного веса постоянно стремятся опуститься на неподвижные направляющие, т. е. закрыться (см. фиг. 15). Стрелки 42 и 43 снабжены контргрузами 55 и 56, которые постоянно стремятся удержать их в открытом положении. Крайнее открытое положение стрелок 42 и 43 определяют упоры 57 и 58 их контргрузов. Пружины 59 и 60 через тяги 49 и 50 постоянно прижимают собачки 44 и 45 к кулачкам 53 и 54 (см. фиг. 15 и 18). Двуплечий рычаг 46 снабжен щтырем
61,для возможности перемещения которого в боковинах 35 выполнены радиальные пазы. Плечо двуплечего рычага 46, па котором смонтирован штырь 61, с помощью пружины
62,соединенной с боковиной 35, всегда стремится быть опущенным вниз.
Следовательно, второе плечо рычага 46, имеющее возможность воздействовать на тяги 49 и 50,-стремится быть поднятым (на фиг. 15, 16, 17 и 18).
Кантователь снабжен копирами 63-66 (см. фит. 1 и 2). Кроме того, кантователь снабжен нижним и верхним плавающими упорами 67 и 68, взаимодействующими с роликами рычагов 33. Упоры 67 и 68 щарнирно смонтированы в корпусах 69 и соединены с ними пружинами 70 (см. фиг. 5).
Опока 71 подается в люльку 8 подъемной секцией 72. Сориентированная кантователем опока поступает на .ролики 73 штангового конвейера, снабженного кулачками 74, предназначенными для передачи опоки 71 на еледующую позицию.
Кантователь работает следующим образом.
В исходном положении тележка 3 с люлькой 8 находятся на подъемной секции 72 рольганга (см. фиг. 1 и 2). При этом у люльки 8 несущие рычаги 17 заперты, щупы 12 с флажками 13 под действием собственного веса находятся в крайнем нижнем положении, опорные катки 10 расположены под упорами 47, а собачки 32 рычагов 33 не входят в зацепление с зубом кулачка 31 (см. фиг. 6, 10, 11, 12 и 13). У направляющего устройства стрелки 40 удерживаются через кулачки 53 собачками 44 в открытом положении, стрелки 41 закрыты собачки 45 (не входят в зацепление с зубом кулачков 54), а стрелки 42 и 43 под действием контргрузов открыты (см. фиг. 14, 15 и 18).
Подъемная секция 72 рольганга подает опо: ку 71 в люльку 8 кантователя, которая от подъема вверх относительно своей оси вращения, удерживается упорами 47 .направляющего устройства. Подаваемая в люльку 8 опока центрируется скосами несущих рычагов 17 и боковыми направляющими 9. По пути подъема в люльку 3 центрируемая опока своим фланцем отжимает захваты 28 несущих рычагов 17. Захваты 28 под действием пружины 29 заскакивают под фланец опоки в тот момент, когда она поднята в крайнее верхнее положение, т. е. до опорных платиков 26 (см. фиг. 6, 10 и 11). Затем подъемная секция 72 рольганга опускается, оставляя опоку в люльке 8. С этого момента силовой цилиндр 5 начинает перемещать вправо тележку 3, которая через подшипники 7 увлекает за собой люльку 8. Траектория движения люльки 8 зависит от того, в каком положении подана опока.
Возможны два положения.
Первое положение, опока подана плоскостью разъема вверх, т. е. пришла опока низа. При этом цапфы опок и не достают до щупов 12 и последние совместно с флажками 13 остаются в крайнем нижнем положении (см. фиг. 6 и 10). Это означает, что при перемещении люльки 8 вправо ее флажки 13 проходят ниже щтырей 61, смонтированных на двуплечих рычагах 46 направляющего устройства. В этом случае двуплечие рычаги 46 не воздействуют на тяги 49 собачек 44, которые через кулачки 53 удерживают стрелки 40 в открытом положении. Так как стрелки 40 и 43 открыты, то перемещаемая вправо люлька 8, опираясь своими опорными катками 10 па профильные направляющие 36 под действием собственного веса и веса опоки, плавно опрокидывается на 90° относительно своей оси вращения, т. е. относительно оси подшипников 7, установленных на кронщтейнах 6 тележки 3 (см. фиг. 1). В процессе дальнейщего перемещения вправо опорные катки 10 перекатываются по профильным направляющим 37, в результате чего совершается дальнейший поворот люльки 8 с опокой на 180° относительно своего первоначального положения. Перемещаясь по профильному участку направляющих 37, опорные катки 10 проходят под стрелками 41 и поднимают их. Стрелки 41, поднимаясь, поворачивают свои кулачки 54 таким образом, что собачки 45 под действием пружин 60 заскакивают под их зуб и тем самым фиксируют открытое положение стрелок,
Дальнейщее перемещение скантованной на 180° люльки 8 сопровождаются встречей роликом ее передних по отнощению к направлению движения рычагОВ 33 с поверхностью 75 нижних упоров 67. В результате этой встречи плавающие упоры 67, преодолевая усилие пружин 70, утапливаются (так как собачки 32 рычагов 33 упираются в кулачки 31) и пропускают вперед рычаги 33. После прохождения рычагов 33 плавающие упоры 67 под действием пружин 70 возвращаются в исходное положение. Окантованная на 180° люлька 8 продолжает перемещаться вправо по горизонтальному участку напр:авляющих 37 и накатывает опоку 71 на ролики 73 транспортного устройства, например щтангового конвейера, до тех пор, пока шарнирно-укрепленные кулачки 74 штанги зайдут на внутреннюю полость опоки. Это положение скантованной люльки 8 соответствует правому крайнему положению тележки 3 кантователя (соответственно и правому крайнему положению щтока силового цилиндра 5). Ролики 73 щтангового конвейера установлены на таком уровне, что опока, накатываясь на них, несколько приподнимается, в результате чего фланец опоки занимает промежуточное положение в зеве между опорными плоскостями платиков 26 и захватов28 (т. е. с несущих (рычагов 17 снимается нагрузка от веса опоки). В месте с тем в процессе перемещ,ения опоки по роликам 73 передние (по отношению к направлению движения) рычаги 22 и 18 люльки 8 своими .роликами 25 поочередно наезжают на копиры 65 и 66. При этом сначала копир 65 поворачивает рычаг 22 таким образом, что его диск-полузамок 23 занимает нейтральное положение по отнощению к дискуполузамку 19 рычага 18, а затем, когда замок открыт, копир 66 поворачивает рычаг 17, а вместе с ним вал 16 и, следовательно, несущие рычаги 17 и кулачок 31. В результате этого поворота несущие рычаги 17 устанавливаются под опокой, а кулачок 31 занимает положение, позволяющее собачке 32 рычага 33 под действием пружины 34 заскочить под его зуб и тем самым зафиксировать это положение несущих рычагов 17 (см. фит. 1, 2, 3, 4, 6, 11 и 12). С этого момента щток силового цилиндра 5 начинает возвращать механизм кантования в исходное положение. При этом тележка 3 с люлькой 8 начинает перемещаться влево. За время перемещения опорных катков 10 люльки 8 по горизонтальному участку направляющих 37 рычаги 18 и 22 своими роликами 25 съезжают с копиров 66 и 65, но продолжают оставаться вместе с несущими рычагами 17 в зафиксированном положении, так как кулачок 31 вала 16 зафиксирован. Вал 16 продолжает оставаться в зафиксированном положении до тех пор, пока несущие рычаги 17 выйдут за пределы опоки, после чего рычаги 33 люльки 8 встречают на своем пути поверхность 76 нижних плавающих упоров 67. В результате этой встречи упоры 67, воздействуя на ролики рычагов 33, отжимают последние, преодолевая сопротивление пружин 34. Рычаги 33, отклоняясь, выводят собачку 32 из под зуба кулачка 31, что дает возможность рычагу 18 под действием пружины 20 возвратить (через вал 16) в исходное положение несущие рычаги 17 и вместе с тем диск - полузамок 19 занимает нейтральное положение по отнощению к диску-полузамку 23 рычага 22. Это позволяет рычагу 22 под действием пружины 24 возвратиться в исходное положение и тем самым запереть замок, образуемый дисками-полузамками 19 и 23. Так как стрелки 42 и 41 направляющего устройства открыты, то в процессе дальнейшего перем:ещения люльки 8 влево, ее опорные катки 10 перемещаются по профильным участкам направляющих 37 и 36, в результате чего люлька переворачивается на 180 и возвращается в исходное положение. В крайнем левом положении тележки 3 люлька 8 готова к приему очередной опоки. За время возврата механизма кантования в исходное положение кулачки 74 щтанги забирают сориентированную опоку (за внутреннюю полость) и передают ее на следующую позицию, освобождая место для очередной опоки, которую подает кантователь (см. фиг. 1, 2, 3, 4, 6, И и 12). Второе положение, опока подана плоскостью разъема вниз (т. е. пришла опока верха). При этом цапфы опоки поднимают вверх щупы 12. Подъем щупов 12 сопровождается подъемом вверх флажков 13, которые при перемещении люльки 8 вправо поднимают щтыри 61 двуплечих рычагов 46. При подъеме щтырей 61 двуплечих рычагов 46 последние своим вторым плечом воздействуют на тяги 49 и 50, которые опускают вниз хвостовики собачек 44 и 45. При этом собачки 44 и 45 освобождают зубья кулачков 53 и 54, в результате чего стрелки 40 и 41 под действием собственного веса закрыв,аются. Так как стрелки 40 закрыты, то опорные катки 10 перемещаемой вправо люльки 8 последовательно пройдут горизонтальный участок направляющих 36, стрелки 40, направляющие 38, стрелки 42 (под действием веса люльки с опокой они опускаются) и горизонтальный участок направляющих 37 (см. 14, 15, 16 и 18). Таким обр,азом, опока подается на ролики штангового конвейера в этом случае не скантованной. После того, как опорные катки 10 пройдут стрелки 42, последние под действием контргрузов 55 автоматически откроются. Вместе с тем, перемещение люльки 8 по горизонтальному участку направляющих 37 сопровождается встречей роликов ее передних (по отношению к направлению движения) рычагов 33 с поверхностью 75 верхних плавающих упоров 68, в результате чего плавающие упоры 68 утапливаются, пропуская вперед рычаги 33. После прохождения рычагов 33 плавающие упоры 68 под действием пружин 70 возвращаются в исходное положение. Так как стрелки 42 направляющего устройства открыты, а стрелки 41 закрыты, то в процессе дальнейшего перемещения люльки 8 влево, ее опорные катки 10 перемещаются по стрелкам 41, направляющим 39, стрелкам 43 (под действием силы веса люльки они опускаются) и направляющим 36. После того, как опорные катки 10 проходят стрелки 43, они
под действием контргрузов 56 аВТО|матнческн открываются.
Перемещаясь по направляющим 36, опорные катки 10 проходят под стрелками 40 и поднимают их. Стрелки 40, поднимаясь, поворачивают свои кулачки 53 таким образом, что собачки 44 под действием пружин 59 заскакивают под их зуб и тем самым фиксируют открытое положение стрелок.
В крайнем левом положении механизм кантования готов к приему очередной опоки.
За время возврата механизма кантования в исходное положение кулачки 74 штанги забирают сориентированную опоку и передают ее на следующую позицию, освобождая место для очередной опоки.
Использование изобретения позволит осуществлять возврат механизма кантования в исходное положение, не ожидая пока транспортный орган заберет сориентированную опоку из зоны люльки, т. е. позволит увеличить производительность кантователя. Вместе с тем, использование изобретения дает возможность совмещать во времени возврат механизма кантования в исходное положение и передачу сориентированной опоки к формовочной машине, т. е. уменьшить затраты времени на осуществление всего кинематического цикла подачи опоки к формовочной машине.
Формула изобретения
Кантователь по авт. св. № 510285, отличающийся тем, что, с целью увеличения производительности, на противоположных концах каждого вала жестко посажены кул.ачки, корпус кантователя снабжен утапливающимися в направлении кантовки верхним и нижним упорами, а на боковых поверхностях основания люльки шарнирно смонтированы подпружиненные рычаги, несущие взаимодействующие с упомянутыми кулачками собачки и контактирующие с утапливающими упорами.
Источники информации, при-нятые во внимание при экспертизе
1. Авторское свидетельство СССР №510285, кл. В 21В 39/20, 1973.



| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь | 1973 |
|
SU510285A1 |
| Кантователь-перекладчик | 1987 |
|
SU1465400A1 |
| Кантователь | 1980 |
|
SU933237A1 |
| Устройство для кантования деталей в автоматических линиях | 1975 |
|
SU606786A1 |
| Автоматический формовочный блок | 1982 |
|
SU1247152A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| Кантователь для штучных изделий | 1986 |
|
SU1377229A1 |
| Конвейерная линия для отделки и транспортировки железобетонных панелей | 1984 |
|
SU1268425A2 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| КАНТОВАТЕЛЬ | 1998 |
|
RU2129087C1 |




ь
ез
22 (Г},.33
t | А-.Г /
L АU Н-У.
I I
,
JJ 22 8 8
iS u-f
I Г18 22
S-8
Vuz.S
-
. /ff
Фиг.
- M
ipus Л
W3
(pa г./.
